Compliance Just Got Easier: Stay ahead of regulatory changes with instant notifications on updates that matter.
['Air Programs']
['Air Emissions']
03/16/2026

Copyright 2026 J. J. Keller & Associate, Inc. For re-use options please contact copyright@jjkeller.com or call 800-558-5011.
§1037.501 General testing and modeling provisions.
This subpart specifies how to perform testing and modeling required elsewhere in this part for demonstrating compliance with fuel consumption standards under 49 CFR part 535.
(a) Except as specified in subpart B of this part, you must demonstrate that you meet the applicable standards using modeling as described in §1037.520. This modeling depends on several measured values as described in this subpart. You may use fuel-mapping information from the engine manufacturer as described in 40 CFR 1036.535 and 1036.540, or you may use powertrain testing as described in 40 CFR 1036.545.
(b) Where testing is required, use equipment and procedures as described in 40 CFR part 1066. Measure CO 2 emissions as specified in 40 CFR part 1065 and part 1066. Use the applicable duty cycles specified in §1037.510.
(c) See 40 CFR 86.101 and 86.1813 for measurement procedures that apply for evaporative and refueling emissions.
(d) Use the applicable fuels specified 40 CFR part 1065 to perform valid tests.
(1) For service accumulation, use the test fuel or any commercially available fuel that is representative of the fuel that in-use vehicles will use.
(2) For diesel-fueled vehicles, use the appropriate diesel fuel specified for emission testing. Unless specified otherwise, the appropriate diesel test fuel is ultra-low sulfur diesel fuel.
(3) For gasoline-fueled vehicles, use the gasoline for “general testing” as specified in 40 CFR 86.1305.
(e) You may use special or alternate procedures as specified in 40 CFR 1065.10.
(f) This subpart is addressed to you as a manufacturer, but it applies equally to anyone who does testing for you, and to us when we perform testing to determine if your vehicles meet the standards.
(g) Apply this paragraph (g) whenever we specify the use of standard trailers. Unless otherwise specified, a tolerance of ± 2 inches applies for all nominal trailer dimensions.
(1) The standard trailer for high-roof tractors must meet the following criteria:
(i) It is an unloaded two-axle dry van 53.0 feet long, 102 inches wide, and 162 inches high (measured from the ground with the trailer level).
(ii) It has a king pin located with its center 36 ± 0.5 inches from the front of the trailer and a minimized trailer gap (no greater than 45 inches).
(iii) It has a simple orthogonal shape with smooth surfaces and nominally flush rivets. Except as specified in paragraph (g)(1)(v) of this section, the standard trailer does not include any aerodynamic features such as side fairings, rear fairings, or gap reducers. It may have a scuff band no more than 0.13 inches thick.
(iv) It includes dual 22.5 inch wheels, standard tandem axle, standard mudflaps, and standard landing gear. The centerline of the tandem axle assembly must be 145 ± 5 inches from the rear of the trailer. The landing gear must be installed in a conventional configuration.
(v) For the Phase 2 or later standards, include side skirts meeting the specifications of this paragraph (g)(1)(v). The side skirts must be mounted flush with both sides of the trailer. The skirts must be an isosceles trapezoidal shape. Each skirt must have a height of 36±2 inches. The top edge of the skirt must be straight with a length of 341±2 inches. The bottom edge of the skirt must be straight with a length of 268±2 inches and have a ground clearance of 8±2 inches through that full length. The sides of the skirts must be straight. The rearmost point of the skirts must be mounted 32±2 inches in front of the centerline of the trailer tandem axle assembly. We may approve your request to use a skirt with different dimensions if these specified values are impractical or inappropriate for your test trailer, and you propose alternative dimensions that provide an equivalent or comparable degree of aerodynamic drag for your test configuration.
(2) The standard trailer for mid-roof tractors is an empty two-axle tank trailer 42 ± 1 feet long by 140 inches high and 102 inches wide.
(i) It has a 40 ± 1 feet long cylindrical tank with a 7000 ± 7 gallon capacity, smooth surface, and rounded ends.
(ii) The standard tank trailer does not include any aerodynamic features such as side fairings, but does include a centered 20 inch manhole, side-centered ladder, and lengthwise walkway. It includes dual 24.5 inch wheels.
(3) The standard trailer for low-roof tractors is an unloaded two-axle flatbed trailer 53 ± 1 feet long and 102 inches wide.
(i) The deck height is 60.0 ± 0.5 inches in the front and 55.0 ± 0.5 inches in the rear. The standard trailer does not include any aerodynamic features such as side fairings.
(ii) It includes an air suspension and dual 22.5 inch wheels on tandem axles.
(h) Note that declared GEM inputs for fuel maps and aerodynamic drag area typically includes compliance margins to account for testing variability; for other measured GEM inputs, the declared values are typically the measured values without adjustment.
[86 FR 34465, Jun. 29, 2021; 89 FR 29778, Apr. 22, 2024; 91 FR 7791, Feb. 18, 2026]
§1037.510 Duty-cycle exhaust testing.
This section applies for powertrain testing, cycle-average engine fuel mapping, certain off-cycle testing under §1037.610, and the advanced-technology provisions of §1037.615.
(a) Measure emissions by testing the powertrain on a powertrain dynamometer with the applicable duty cycles. Each duty cycle consists of a series of speed commands over time—variable speeds for the transient test and constant speeds for the highway cruise tests. None of these cycles include vehicle starting or warmup.
(1) Perform testing for Phase 1 vehicles as follows to generate credits or adjustment factors for off-cycle or advanced technologies:
(i) Transient cycle. The transient cycle is specified in appendix A to this part. Warm up the vehicle. Start the duty cycle within 30 seconds after concluding the preconditioning procedure. Start sampling emissions at the start of the duty cycle.
(ii) Cruise cycle. For the 55 mi/hr and 65 mi/hr highway cruise cycles, warm up the vehicle at the test speed, then sample emissions for 300 seconds while maintaining vehicle speed within ±1.0 mi/hr of the speed setpoint; this speed tolerance applies instead of the approach specified in 40 CFR 1066.425(b)(1) and (2).
(2) Perform cycle-average engine fuel mapping for Phase 2 and later vehicles as described in 40 CFR 1036.540. For powertrain testing under 40 CFR 1036.545 or §1037.555, perform testing as described in this paragraph (a)(2) to generate GEM inputs for each simulated vehicle configuration, and test runs representing different idle conditions. Perform testing as follows:
(i) Transient cycle. The transient cycle is specified in appendix A to this part.
(ii) Highway cruise cycles. The grade portion of the route corresponding to the 55 mi/hr and 65 mi/hr highway cruise cycles is specified in appendix D to this part. Maintain vehicle speed between -1.0 mi/hr and 3.0 mi/hr of the speed setpoint; this speed tolerance applies instead of the approach specified in 40 CFR 1066.425(b)(1) and (2).
(iii) Drive idle. Perform testing at a loaded idle condition for Phase 2 vocational vehicles. For engines with an adjustable warm idle speed setpoint, test at the minimum warm idle speed and the maximum warm idle speed; otherwise simply test at the engine's warm idle speed. Warm up the powertrain as described in 40 CFR 1036.520(d). Within 60 seconds after concluding the warm-up, linearly ramp the powertrain down to zero vehicle speed over 20 seconds. Apply the brake and keep the transmission in drive (or clutch depressed for manual transmission). Stabilize the powertrain for (60±1) seconds and then sample emissions for (30±1) seconds.
(iv) Parked idle. Perform testing at a no-load idle condition for Phase 2 vocational vehicles. For engines with an adjustable warm idle speed setpoint, test at the minimum warm idle speed and the maximum warm idle speed; otherwise simply test at the engine's warm idle speed. Warm up the powertrain as described in 40 CFR 1036.520(d). Within 60 seconds after concluding the warm-up, linearly ramp the powertrain down to zero vehicle speed in 20 seconds. Put the transmission in park (or neutral for manual transmissions and apply the parking brake if applicable). Stabilize the powertrain for (180±1) seconds and then sample emissions for (600±1) seconds.
(3) Where applicable, perform testing on a chassis dynamometer as follows:
(i) Transient cycle. The transient cycle is specified in appendix A to this part. Warm up the vehicle by operating over one transient cycle. Within 60 seconds after concluding the warm up cycle, start emission sampling and operate the vehicle over the duty cycle.
(ii) Highway cruise cycle. The grade portion of the route corresponding to the 55 mi/hr and 65 mi/hr highway cruise cycles is specified in appendix D to this part. Warm up the vehicle by operating it at the appropriate speed setpoint over the duty cycle. Within 60 seconds after concluding the preconditioning cycle, start emission sampling and operate the vehicle over the duty cycle, maintaining vehicle speed within ±1.0 mi/hr of the speed setpoint; this speed tolerance applies instead of the approach specified in 40 CFR 1066.425(b)(1) and (2).
(b) Calculate the official emission result from the following equation:
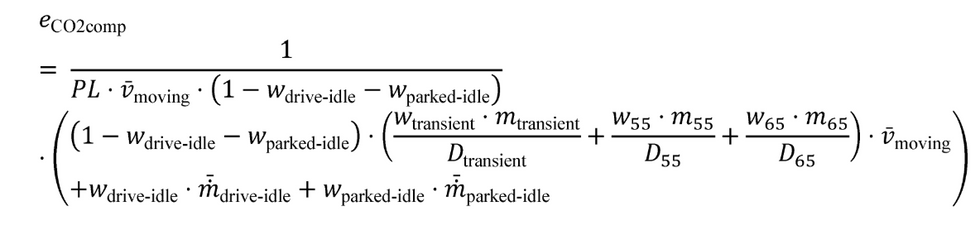
Eq. 1037.510-1
Where:
e CO2comp = total composite mass of CO 2 emissions in g/ton-mile, rounded to the nearest whole number for vocational vehicles and to the first decimal place for tractors.
PL = the standard payload, in tons, as specified in §1037.705.
v moving = mean composite weighted driven vehicle speed, excluding idle operation, as shown in table 1 to paragraph (c)(3) of this section for Phase 2 vocational vehicles. For other vehicles, let v moving = 1.
w [cycle] = weighting factor for the appropriate test cycle, as shown in table 1 to paragraph (c)(3) of this section.
m [cycle] = CO 2 mass emissions over each test cycle (other than idle).
D [cycle] = the total driving distance for the indicated duty cycle. Use 2.842 miles for the transient cycle, and use 13.429 miles for both of the highway cruise cycles.
m [cycle]-idle = CO 2 emission rate at idle.
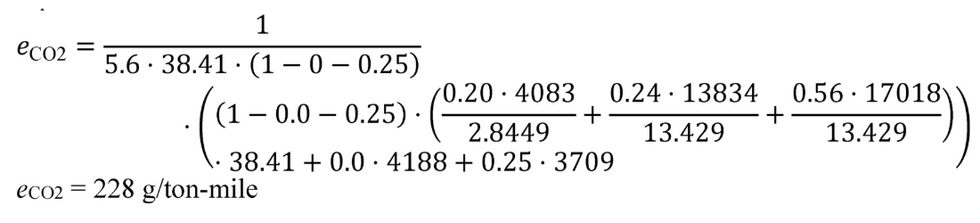
Example: Class 7 vocational vehicle meeting the Phase 2 standards based on the Regional duty cycle.
PL = 5.6 tons
v moving = 38.41 mi/hr
w transient = 20% = 0.20
w drive-idle = 0% = 0
w parked-idle = 25% = 0.25
w 55 = 24% = 0.24
w 65 = 56% = 0.56
m transient = 4083 g
m 55 = 13834 g
m 65 = 17018 g
D transient = 2.8449 miles
D 55 = 13.429 miles
D 65 = 13.429 miles
m drive-idle = 4188 g/hr
m parked-idle = 3709 g/hr
(c) Weighting factors apply for each type of vehicle and for each duty cycle as follows:
(1) GEM applies weighting factors for specific types of tractors as shown in table 1 to paragraph (c)(3) of this section.
(2) GEM applies weighting factors for vocational vehicles as shown in table 1 to paragraph (c)(3) of this section. Modeling for Phase 2 vocational vehicles depends on characterizing vehicles by duty cycle to apply proper weighting factors and average speed values. Select either Urban, Regional, or Multi-Purpose as the most appropriate duty cycle for modeling emission results with each vehicle configuration, as specified in §1037.140 and 1037.150.
(3) Table 1 to this paragraph (c)(3) follows:
| Distance-weighted | Time-weighted a | Average speed during non-idle cycles (mi/hr) b | |||||
|---|---|---|---|---|---|---|---|
| Transient (%) | 55 mi/hr cruise (%) | 65 mi/hr cruise (%) | Drive idle (%) | Parked idle (%) | Non-idle (%) | ||
| a Note that these drive idle and non-idle weighting factors do not reflect additional drive idle that occurs during the transient cycle. The transient cycle does not include any parked idle. | |||||||
| b These values apply even for vehicles not following the specified speed traces. | |||||||
| Day Cabs | 19 | 17 | 64 | ||||
| Sleeper Cabs | 5 | 9 | 86 | ||||
| Heavy-haul Tractors | 19 | 17 | 64 | ||||
| Vocational—Regional | 20 | 24 | 56 | 0 | 25 | 75 | 38.41 |
| Vocational—Multi-Purpose (2b-7) | 54 | 29 | 17 | 17 | 25 | 58 | 23.18 |
| Vocational—Multi-Purpose (8) | 54 | 23 | 23 | 17 | 25 | 58 | 23.27 |
| Vocational—Urban (2b-7) | 92 | 8 | 0 | 15 | 25 | 60 | 16.25 |
| Vocational—Urban (8) | 90 | 10 | 0 | 15 | 25 | 60 | 16.51 |
| Vocational with conventional powertrain (Phase 1 only) | 42 | 21 | 37 | ||||
| Vocational Hybrid Vehicles (Phase 1 only) | 75 | 9 | 16 | ||||
(d) For highway cruise and transient testing, compare actual second-by-second vehicle speed with the speed specified in the test cycle and ensure any differences are consistent with the criteria as specified in 40 CFR 1036.545(g)(1). If the speeds are not consistent with the criteria as specified in 40 CFR 1036.545(g)(1), the test is not valid and must be repeated.
(e) Run test cycles as specified in 40 CFR part 1066. For testing vehicles equipped with cruise control over the highway cruise cycles, you may use the vehicle's cruise control to control the vehicle speed. For vehicles equipped with adjustable vehicle speed limiters, test the vehicle with the vehicle speed limiter at its highest setting.
(f) For Phase 1, test the vehicle using its adjusted loaded vehicle weight, unless we determine this would be unrepresentative of in-use operation as specified in 40 CFR 1065.10(c)(1).
(g) For hybrid vehicles, correct for the net energy change of the energy storage device as described in 40 CFR 1066.501(a)(3).
[86 FR 34465, Jun. 26, 2021; 87 FR 45264, July 28, 2022; 88 FR 4641, Jan. 24, 2023; 89 FR 29778, Apr. 22, 2024]
§1037.520 Modeling CO emissions to show that vehicles comply with fuel consumption standards.
This section describes how to use the Greenhouse gas Emissions Model (GEM) to show compliance with NHTSA's fuel consumption standards under 49 CFR part 535. Use GEM version 2.0.1 to demonstrate compliance with Phase 1 standards; use GEM Phase 2, Version 4.0 to demonstrate compliance with Phase 2 standards (both incorporated by reference, see §1037.810). Use good engineering judgment when demonstrating compliance using GEM.
(a) General modeling provisions. To run GEM, enter all applicable inputs as specified by the model.
(1) GEM inputs apply for Phase 1 standards as follows:
(i) Model year and regulatory subcategory (see §1037.230).
(ii) Coefficient of aerodynamic drag or drag area, as described in paragraph (b) of this section (tractors only).
(iii) Steer and drive tire rolling resistance, as described in paragraph (c) of this section.
(iv) Vehicle speed limit, as described in paragraph (d) of this section (tractors only).
(v) Vehicle weight reduction, as described in paragraph (e) of this section (tractors only for Phase 1).
(vi) Automatic engine shutdown systems, as described in §1037.660 (only for Class 8 sleeper cabs). Enter a GEM input value of 5.0 g/ton-mile, or an adjusted value as specified in §1037.660.
(2) For Phase 2 and later vehicles, the GEM inputs described in paragraphs (a)(1)(i) through (v) of this section continue to apply. Note that the provisions in this part related to vehicle speed limiters and automatic engine shutdown systems are available for Phase 2 and later vocational vehicles. The rest of this section describes additional GEM inputs for demonstrating compliance with Phase 2 and later standards. Simplified versions of GEM apply for limited circumstances as follows:
(i) You may use default engine fuel maps for glider kits as described in §1037.635.
(ii) If you certify vehicles to the custom-chassis standards specified in §1037.105(h), run GEM by identifying the vehicle type and entering “NA” instead of what would otherwise apply for, tire revolutions per mile, engine information, transmission information, drive axle ratio, axle efficiency, and aerodynamic improvement as specified in paragraphs (c)(1), (f), (g)(1) and (3), (i), and (m) of this section, respectively. Incorporate other GEM inputs as specified in this section.
(b) Coefficient of aerodynamic drag and drag area for tractors. Determine the appropriate drag area, C d A, for tractors as described in this paragraph (b). Use the recommended method or an alternate method to establish a value for C d A, expressed in m2 to one decimal place, as specified in §1037.525. Where we allow you to group multiple configurations together, measure C d A of the worst-case configuration.
(1) Except as specified in paragraph (b)(2) of this section, determine the Phase 1 bin level for your vehicle based on measured C d A values as shown in the following tables:
| Tractor type | Bin level | If your measured C D A (M) is . . | Then your C D input is . . . |
|---|---|---|---|
| High-Roof Day Cabs | Bin I | ≥8.0 | 0.79 |
| Bin II | 7.1-7.9 | 0.72 | |
| Bin III | 6.2-7.0 | 0.63 | |
| Bin IV | 5.6-6.1 | 0.56 | |
| Bin V | ≤5.5 | 0.51 | |
| High-Roof Sleeper Cabs | Bin I | ≥7.6 | 0.75 |
| Bin II | 6.8-7.5 | 0.68 | |
| Bin III | 6.3-6.7 | 0.60 | |
| Bin IV | 5.6-6.2 | 0.52 | |
| Bin V | ≤5.5 | 0.47 |
| Tractor type | Bin level | If your measured C D A (M) is . . | Then your C D input is . . . |
|---|---|---|---|
| Low-Roof Day and Sleeper Cabs | Bin I Bin II | ≥5.1 ≤5.0 | 0.77 0.71 |
| Mid-Roof Day and Sleeper Cabs | Bin I | ≥5.6 | 0.87 |
| Bin II | ≤5.5 | 0.82 |
(2) For Phase 1 low- and mid-roof tractors, you may instead determine your drag area bin based on the drag area bin of an equivalent high-roof tractor. If the high-roof tractor is in Bin I or Bin II, then you may assume your equivalent low- and mid-roof tractors are in Bin I. If the high-roof tractor is in Bin III, Bin IV, or Bin V, then you may assume your equivalent low- and mid-roof tractors are in Bin II.
(3) For Phase 2 and later tractors other than heavy-haul tractors, determine bin levels and C d A inputs as follows:
(i) Determine bin levels for high-roof tractors based on aerodynamic test results as specified in §1037.525 and summarized in the following table:
| Tractor type | Bin I | Bin II | Bin III | Bin IV | Bin V | Bin VI | Bin VII |
|---|---|---|---|---|---|---|---|
| Day Cabs | ≥7.2 | 6.6-7.1 | 6.0-6.5 | 5.5-5.9 | 5.0-5.4 | 4.5-4.9 | ≤4.4 |
| Sleeper Cabs | ≥6.9 | 6.3-6.8 | 5.7-6.2 | 5.2-5.6 | 4.7-5.1 | 4.2-4.6 | ≤4.1 |
(ii) For low- and mid-roof tractors, you may either use the same bin level that applies for an equivalent high-roof tractor as shown in table 3 to paragraph (b)(3)(i) of this section, or you may determine your bin level based on aerodynamic test results as described in table 4 to this paragraph (b)(3)(ii).
| Tractor type | Bin I | Bin II | Bin III | Bin IV | Bin V | Bin VI | Bin VII |
|---|---|---|---|---|---|---|---|
| Low-Roof Cabs | ≥5.4 | 4.9-5.3 | 4.5-4.8 | 4.1-4.4 | 3.8-4.0 | 3.5-3.7 | ≤3.4 |
| Mid-Roof Cabs | ≥5.9 | 5.5-5.8 | 5.1-5.4 | 4.7-5.0 | 4.4-4.6 | 4.1-4.3 | ≤4.0 |
(iii) Determine the C d A input according to the tractor's bin level as described in the following table:
| Tractor type | Bin I | Bin II | Bin III | Bin IV | Bin V | Bin VI | Bin VII |
|---|---|---|---|---|---|---|---|
| High-Roof Day Cabs | 7.45 | 6.85 | 6.25 | 5.70 | 5.20 | 4.70 | 4.20 |
| High-Roof Sleeper Cabs | 7.15 | 6.55 | 5.95 | 5.40 | 4.90 | 4.40 | 3.90 |
| Low-Roof Cabs | 6.00 | 5.60 | 5.15 | 4.75 | 4.40 | 4.10 | 3.80 |
| Mid-Roof Cabs | 7.00 | 6.65 | 6.25 | 5.85 | 5.50 | 5.20 | 4.90 |
(4) Note that, starting in model year 2027, GEM internally reduces C d A for high-roof tractors by 0.3 m2 to simulate adding a rear fairing to the standard trailer.
(c) Tire revolutions per mile and rolling resistance. You must have a tire revolutions per mile (TRPM) and a tire rolling resistance level (TRRL) for each tire configuration. For purposes of this section, you may consider tires with the same SKU number to be the same configuration. Determine TRRL input values separately for drive and steer tires; determine TRPM only for drive tires.
(1) Use good engineering judgment to determine a tire's revolutions per mile to the nearest whole number as specified in SAE J1025 (incorporated by reference, see §1037.810). Note that for tire sizes that you do not test, we will treat your analytically derived revolutions per mile the same as test results, and we may perform our own testing to verify your values. We may require you to test a sample of additional tire sizes that we select.
(2) Measure tire rolling resistance in newton per kilonewton as specified in ISO 28580 (incorporated by reference, see §1037.810), except as specified in this paragraph (c). Use good engineering judgment to ensure that your test results are not biased low. You may ask us to identify a reference test laboratory to which you may correlate your test results. Prior to beginning the test procedure in Section 7 of ISO 28580 for a new bias-ply tire, perform a break-in procedure by running the tire at the specified test speed, load, and pressure for (60±2) minutes.
(3) For each tire design tested, measure rolling resistance of at least three different tires of that specific design and size. Perform the test at least once for each tire. Calculate the arithmetic mean of these results to the nearest 0.1 N/kN and use this value or any higher value as your GEM input for TRRL. You must test at least one tire size for each tire model, and may use engineering analysis to determine the rolling resistance of other tire sizes of that model. Note that for tire sizes that you do not test, we will treat your analytically derived rolling resistances the same as test results, and we may perform our own testing to verify your values. We may require you to test a small sub-sample of untested tire sizes that we select.
(4) If you obtain your test results from the tire manufacturer or another third party, you must obtain a signed statement from the party supplying those test results to verify that tests were conducted according to the requirements of this part. Such statements are deemed to be submissions to EPA.
(5) For tires marketed as light truck tires that have load ranges C, D, or E, use as the GEM input TRRL multiplied by 0.87.
(6) For vehicles with at least three drive axles or for vehicles with more than three axles total, use good engineering judgment to combine tire rolling resistance into three values (steer, drive 1, and drive 2) for use in GEM. This may require performing a weighted average of tire rolling resistance from multiple axles based on the typical load on each axle. For liftable axles, calculate load- and time-weighted values to represent the load and the amount of time these tires are in contact with the ground during typical in-use operation.
(7) For vehicles with a single rear axle, enter “NA” as the TRRL value for drive axle 2.
(d) Vehicle speed limit. If the vehicles will be equipped with a vehicle speed limiter, input the maximum vehicle speed to which the vehicle will be limited (in miles per hour rounded to the nearest 0.1 mile per hour) as specified in §1037.640. Use good engineering judgment to ensure the limiter is tamper resistant. We may require you to obtain preliminary approval for your designs.
(e) Vehicle weight reduction. Develop a weight-reduction as a GEM input as described in this paragraph (e). Enter the sum of weight reductions as described in this paragraph (e), or enter zero if there is no weight reduction. For purposes of this paragraph (e), high-strength steel is steel with tensile strength at or above 350 MPa.
(1) Vehicle weight reduction inputs for wheels are specified relative to dual-wide tires with conventional steel wheels. For purposes of this paragraph (e)(1), an aluminum alloy qualifies as light-weight if a dual-wide drive wheel made from this material weighs at least 21 pounds less than a comparable conventional steel wheel. The inputs are listed in table 6 to this paragraph (e)(1). For example, a tractor or vocational vehicle with aluminum steer wheels and eight (4×2) dual-wide aluminum drive wheels would have an input of 210 pounds (2×21 + 8×21).
| Tire type | Material | Weight reduction— Phase 1 (pounds per wheel) | Weight reduction— Phase 2 and later (pounds per wheel) |
|---|---|---|---|
| a The weight reduction for wide-base tires accounts for reduced tire weight relative to dual-wide tires. | |||
| Wide-Base Single Drive Tire with . . . a | Steel Wheel | 84 | 84 |
| Aluminum Wheel | 139 | 147 | |
| Light-Weight Aluminum Alloy Wheel | 147 | 147 | |
| Steer Tire or Dual-wide Drive Tire with . . . | High-Strength Steel Wheel | 8 | 8 |
| Aluminum Wheel | 21 | 25 | |
| Light-Weight Aluminum Alloy Wheel | 30 | 25 | |
(2) Weight reduction inputs for tractor components other than wheels are specified in the following table:
| Weight reduction technologies | Aluminum | High-strength steel | Thermoplastic |
|---|---|---|---|
| Door | 20 | 6 | |
| Roof | 60 | 18 | |
| Cab rear wall | 49 | 16 | |
| Cab floor | 56 | 18 | |
| Hood Support Structure System | 15 | 3 | |
| Hood and Front Fender | 65 | ||
| Day Cab Roof Fairing | 18 | ||
| Sleeper Cab Roof Fairing | 75 | 20 | 40 |
| Aerodynamic Side Extender | 10 | ||
| Fairing Support Structure System | 35 | 6 | |
| Instrument Panel Support Structure | 5 | 1 | |
| Brake Drums—Drive (set of 4) | 140 | 74 | |
| Brake Drums—Non Drive (set of 2) | 60 | 42 | |
| Frame Rails | 440 | 87 | |
| Crossmember—Cab | 15 | 5 | |
| Crossmember—Suspension | 25 | 6 | |
| Crossmember—Non Suspension (set of 3) | 15 | 5 | |
| Fifth Wheel | 100 | 25 | |
| Radiator Support | 20 | 6 | |
| Fuel Tank Support Structure | 40 | 12 | |
| Steps | 35 | 6 | |
| Bumper | 33 | 10 | |
| Shackles | 10 | 3 | |
| Front Axle | 60 | 15 | |
| Suspension Brackets, Hangers | 100 | 30 | |
| Transmission Case | 50 | 12 | |
| Clutch Housing | 40 | 10 | |
| Fairing Support Structure System | 35 | 6 | |
| Drive Axle Hubs (set of 4) | 80 | 20 | |
| Non Drive Hubs (2) | 40 | 5 | |
| Two-piece driveshaft | 20 | 5 | |
| Transmission/Clutch Shift Levers | 20 | 4 |
(3) Weight-reduction inputs for vocational-vehicle components other than wheels are specified in the following table:
| Component | Material | Vehicle type | ||
|---|---|---|---|---|
| Light HDV | Medium HDV b | Heavy HDV | ||
| a Weight-reduction values apply per vehicle unless otherwise noted. | ||||
| b For Medium HDV with 6×4 or 6×2 axle configurations, use the values for Heavy HDV. | ||||
| Axle Hubs—Non-Drive | Aluminum | 40 | 40 | |
| Axle Hubs—Non-Drive | High Strength Steel | 5 | 5 | |
| Axle—Non-Drive | Aluminum | 60 | 60 | |
| Axle—Non-Drive | High Strength Steel | 15 | 15 | |
| Brake Drums—Non-Drive | Aluminum | 60 | 60 | |
| Brake Drums—Non-Drive | High Strength Steel | 42 | 42 | |
| Axle Hubs—Drive | Aluminum | 40 | 80 | |
| Axle Hubs—Drive | High Strength Steel | 10 | 20 | |
| Brake Drums—Drive | Aluminum | 70 | 140 | |
| Brake Drums—Drive | High Strength Steel | 37 | 74 | |
| Suspension Brackets, Hangers | Aluminum | 67 | 100 | |
| Suspension Brackets, Hangers | High Strength Steel | 20 | 30 | |
| Crossmember—Cab | Aluminum | 10 | 15 | 15 |
| Crossmember—Cab | High Strength Steel | 2 | 5 | 5 |
| Crossmember—Non-Suspension | Aluminum | 15 | 15 | 15 |
| Crossmember—Non-Suspension | High Strength Steel | 5 | 5 | 5 |
| Crossmember—Suspension | Aluminum | 15 | 25 | 25 |
| Crossmember—Suspension | High Strength Steel | 6 | 6 | 6 |
| Driveshaft | Aluminum | 12 | 40 | 50 |
| Driveshaft | High Strength Steel | 5 | 10 | 12 |
| Frame Rails | Aluminum | 120 | 300 | 440 |
| Frame Rails | High Strength Steel | 40 | 40 | 87 |
(4) Apply vehicle weight inputs for changing technology configurations as follows:
(i) For Class 8 tractors or for Class 8 vocational vehicles with a permanent 6x2 axle configuration, apply a weight reduction input of 300 pounds. However, apply no weight reduction for coach buses certified to custom-chassis standards under §1037.105(h).
(ii) For Class 8 tractors with 4x2 axle configuration, apply a weight reduction input of 400 pounds.
(iii) For tractors with installed engines with displacement below 14.0 liters, apply a weight reduction of 300 pounds.
(iv) For tractors with single-piece driveshafts with a total length greater than 86 inches, apply a weight reduction of 43 pounds for steel driveshafts and 63 pounds for aluminum driveshafts.
(5) You may ask to apply the off-cycle technology provisions of §1037.610 for weight reductions not covered by this paragraph (e).
(f) Engine characteristics. Enter information from the engine manufacturer to describe the installed engine and its operating parameters as described in 40 CFR 1036.505. Note that you do not need fuel consumption at idle for tractors.
(g) Vehicle characteristics. Enter the following information to describe the vehicle and its operating parameters:
(1) Transmission make, model, and type. Also identify the gear ratio for every available forward gear to two decimal places, the input torque limit for each of the forward gears, and, if applicable, the lowest gear involving a locked torque converter. Count forward gears as being available only if the vehicle has the hardware and software to allow operation in those gears. For vehicles with a manual transmission, GEM applies a 2% emission increase relative to automated manual transmissions. If your vehicle has a dual-clutch transmission, use good engineering judgment to determine if it can be accurately represented in GEM as an automated manual transmission. We may require you to perform a powertrain test with dual-clutch transmissions to show that they can be properly simulated as an automated manual transmission.
(2) Drive axle make, model, and configuration. Select a drive axle configuration to represent your vehicle for modeling.
(i) 4x2: One drive axle and one non-drive axle. This includes vehicles with two drive axles where one of the drive axles is disconnectable and that disconnectable drive axle is designed to be connected only when the vehicle is driven off-road or in slippery conditions if at least one of the following is true:
(A) The input and output of the disconnectable axle is mechanically disconnected from the drive shaft and the wheels when the axle is in 4x2 configuration.
(B) You provide power loss data generated according to §1037.560 for the combination of both drive axles, where the disconnectable drive axle is in the disconnected configuration.
(ii) 6x2: One drive axle and two non-drive axles.
(iii) 6x4: Two or more drive axles, or more than three total axles. Note that this includes, for example, a vehicle with two drive axles out of four total axles (otherwise known as an 8x4 configuration).
(iv) 6x4D: One non-drive axle and two drive axles where one of the two drive axles is automatically disconnectable such that the axle can switch between 6x2 and 6x4 configurations. You may select this configuration only if at least one of the following is true:
(A) The input and output of the disconnectable axle is mechanically disconnected from the drive shaft and the wheels when the axle is in the 6x2 configuration.
(B) You provide power loss data generated according to §1037.560 for the combination of both drive axles, where the disconnectable drive axle is in the disconnected configuration.
(3) Drive axle ratio, k a. If a vehicle is designed with two or more user-selectable axle ratios, use the drive axle ratio that is expected to be engaged for the greatest driving distance. If the vehicle does not have a drive axle, such as a hybrid vehicle with direct electric drive, let k a = 1.
(4) GEM inputs associated with powertrain testing include powertrain family, transmission calibration identifier, test data from 40 CFR 1036.545, and the powertrain test configuration (dynamometer connected to transmission output or wheel hub). You do not need to identify or provide inputs for transmission gear ratios, fuel map data, or engine torque curves, which would otherwise be required under paragraph (f) of this section.
(h) Idle speed and idle-reduction technologies. The following provisions apply for engine idling:
(1) For engines with no adjustable warm idle speed, input vehicle idle speed as the manufacturer's declared warm idle speed. For engines with adjustable warm idle speed, input your vehicle idle speed as follows:
| If your vehicle is a | And your engine is subject to | Your default vehicle idle speed is a |
|---|---|---|
| (i) Heavy HDV | compression-ignition or spark-ignition standards | 600 r/min. |
| (ii) Medium HDV tractor | compression-ignition standards | 700 r/min. |
| (iii) Light HDV or Medium HDV vocational vehicle | compression-ignition standards | 750 r/min. |
| (iv) Light HDV or Medium HDV | spark-ignition standards | 600 r/min. |
| a If the default idle speed is above or below the engine manufacturer's whole range of declared warm idle speeds, use the manufacturer's maximum or minimum declared warm idle speed, respectively, instead of the default value. | ||
(2) Identify whether your vehicle has qualifying idle-reduction technologies, subject to the qualifying criteria in §1037.660, as follows:
(i) Stop-start technology and automatic engine shutdown systems apply for vocational vehicles. See paragraph (j) of this section for automatic engine shutdown systems for tractors.
(ii) Neutral idle applies for tractors and vocational vehicles.
(i) Axle, transmission, and torque converter characterization. You may characterize the axle, transmission, and torque converter using axle efficiency maps as described in §1037.560, transmission efficiency maps as described in §1037.565, and torque converter capacity factors and torque ratios as described in §1037.570 to replace the default values in GEM. If you obtain your test results from the axle manufacturer, transmission manufacturer, torque converter manufacturer or another third party, you must obtain a signed statement from the party supplying those test results to verify that tests were conducted according to the requirements of this part. Such statements are deemed to be submissions to EPA.
(j) Additional reduction technologies. Enter input values in GEM as follows to characterize the percentage CO2 emission reduction corresponding to certain technologies and vehicle configurations, or enter 0:
(1) Intelligent controls. Enter 2 for tractors with predictive cruise control. This includes any cruise control system that incorporates satellite-based global-positioning data for controlling operator demand. For tractors without predictive cruise control and for all vocational vehicles, enter 1.5 if they have neutral coasting or the installed engine deactivates all cylinders closing all intake and exhaust valves when operator demand is zero while the vehicle is in motion, unless good engineering judgment indicates that a lower percentage should apply.
(2) Accessory load. Enter the following values related to accessory loads; if more than one item applies, enter the sum of those values:
(i) If vocational vehicles have electrically powered pumps for steering, enter 0.5 for vocational vehicles certified with the Regional duty cycle, and enter 1 for other vocational vehicles.
(ii) If tractors have electrically powered pumps for both steering and engine cooling, enter 1.
(iii) If vehicles have a high-efficiency air conditioning compressor, enter 0.5 for tractors, 0.5 for vocational Heavy HDV, and 1 for other vocational vehicles. This includes all electrically powered compressors. It also include mechanically powered compressors if the coefficient of performance improves by 10 percent or greater over the baseline design, consistent with the provisions for improved evaporators and condensers in 40 CFR 86.1868-12(h)(5).
(3) Tire-pressure systems. Enter 1.2 for vehicles with automatic tire inflation systems on all axles (1.1 for Multi-Purpose and Urban vocational vehicles). Enter 1.0 for vehicles with tire pressure monitoring systems on all axles (0.9 for Multi-Purpose and Urban vocational vehicles). If vehicles use a mix of the two systems, treat them as having only tire pressure monitoring systems.
(4) Extended-idle reduction. Enter values as shown in the following table for sleeper cabs equipped with idle-reduction technology meeting the requirements of §1037.660 that are designed to automatically shut off the main engine after 300 seconds or less:
| Technology | GEM input values | |
|---|---|---|
| Adjustable | Tamper- resistant | |
| Standard AES system | 1 | 4 |
| With diesel APU | 3 | 4 |
| With battery APU | 5 | 6 |
| With automatic stop-start | 3 | 3 |
| With fuel-operated heater (FOH) | 2 | 3 |
| With diesel APU and FOH | 4 | 5 |
| With battery APU and FOH | 5 | 6 |
| With stop-start and FOH | 4 | 5 |
(5) Other. Additional GEM inputs may apply as follows:
(i) Enter 0.9 and 1.7, respectively, for school buses and coach buses that have at least seven available forward gears.
(ii) If we approve off-cycle technology under §1037.610 in the form of an improvement factor, enter the improvement factor expressed as a percentage reduction in CO2 emissions. (Note: In the case of approved off-cycle technologies whose benefit is quantified as a g/ton-mile credit, apply the credit to the GEM result, not as a GEM input value.)
(k) Vehicles with hybrid power take-off. For vocational vehicles, determine the delta PTO emission result of your engine and hybrid power take-off system as described in §1037.540.
(l) [Reserved]
(m) Aerodynamic improvements for vocational vehicles. For vocational vehicles certified using the Regional duty cycle, enter ΔC d A values to account for using aerodynamic devices as follows:
(1) Enter 0.2 for vocational vehicles with an installed rear fairing if the vehicle is at least 7 m long with a minimum frontal area of 8 m2.
(2) For vehicles at least 11 m long with a minimum frontal area of 9 m2, enter 0.5 if the vehicle has both skirts and a front fairing, and enter 0.3 if it has only one of those devices.
(3) You may determine input values for these or other technologies based on aerodynamic measurements as described in §1037.527.
(n) Alternate fuels. For fuels other than those identified in GEM, perform the simulation by identifying the vehicle as being diesel-fueled if the engine is subject to the compression-ignition standard, or as being gasoline-fueled if the engine is subject to the spark-ignition standards. Correct the engine or powertrain fuel map for mass-specific net energy content as described in 40 CFR 1036.535(b).
[86 FR 34467, Jun. 29, 2021; 87 FR 45265, July 28, 2022; 88 FR 4642, Jan. 24, 2023; 89 FR 29780, Apr. 22, 2024; 91 FR 7791, Feb. 18, 2026]
§1037.525 Aerodynamic measurements for tractors.
This section describes a methodology for quantifying aerodynamic drag for use in determining input values for tractors as described in §1037.520. This coastdown testing is the reference method for aerodynamic measurements.
(a) General provisions. The GEM input for a tractor's aerodynamic performance is a C d value for Phase 1 and a C d A value for Phase 2 and later. The input value is measured or calculated for a tractor in a specific test configuration with a trailer, such as a high-roof tractor with a box van meeting the requirements for the standard trailer.
(1) Aerodynamic measurements may involve any of several different procedures. Measuring with different procedures introduces variability, so we identify the coastdown method in §1037.528 as the primary (or reference) procedure. You may use other procedures with our advance approval as described in paragraph (d) of this section, but we require that you adjust your test results from other test methods to correlate with coastdown test results. All adjustments must be consistent with good engineering judgment. Submit information describing how you quantify aerodynamic drag from coastdown testing, whether or not you use an alternate method.
(2) Test high-roof tractors with a standard trailer as described in §1037.501(g)(1). Note that the standard trailer for Phase 1 tractors is different from that of later model years. Note also that GEM may model a different configuration than the test configuration, but accounts for this internally. Test low-roof and mid-roof tractors without a trailer; however, you may test low-roof and mid-roof tractors with a trailer to evaluate off-cycle technologies.
(b) Adjustments to correlate with coastdown testing. Adjust aerodynamic drag values from alternate methods to be equivalent to the corresponding values from coastdown measurements as follows:
(1) Determine the functional relationship between your alternate method and coastdown testing. Specify this functional relationship as F alt-aero for a given alternate drag measurement method. The effective yaw angle, eff , is assumed to be zero degrees for Phase 1. For Phase 2 and later, determine eff from coastdown test results using the following equation:
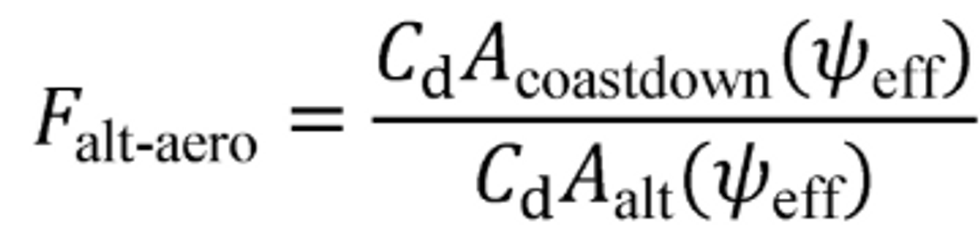
Eq. 1037.525-1
Where:
C d A coastdown (eff) = the average drag area measured during coastdown at an effective yaw angle, eff .
C d A alt (eff) = the average drag area calculated from an alternate drag measurement method at an effective yaw angle, eff .
(2) Unless good engineering judgment dictates otherwise, assume that coastdown drag is proportional to drag measured using alternate methods and apply a constant adjustment factor, F alt-aero , for a given alternate drag measurement method of similar vehicles.
(3) Determine F alt-aero by performing coastdown testing and applying your alternate method on the same vehicles. Consider all applicable test data including data collected during selective enforcement audits. Unless we approve another vehicle, one vehicle must be a Class 8 high-roof sleeper cab with a full aerodynamics package pulling a standard trailer. Where you have more than one tractor model meeting these criteria, use the tractor model with the highest projected sales. If you do not have such a tractor model, you may use your most comparable tractor model with our prior approval. In the case of alternate methods other than those specified in this subpart, good engineering judgment may require you to determine your adjustment factor based on results from more than the specified minimum number of vehicles.
(4) Measure the drag area using your alternate method for a Phase 2 and later tractor used to determine F alt-aero with testing at yaw angles of 0°, ±1°, ±3°, ±4.5°, ±6°, and ±9° (you may include additional angles), using direction conventions described in Figure 2 of SAE J1252 (incorporated by reference, see §1037.810). Also, determine the drag area at the coastdown effective yaw angle, C d A alt ( eff), by taking the average drag area at eff and− eff for your vehicle using the same alternate method.
(5) For Phase 2 and later testing, determine separate values of F alt-aero for at least one high-roof day cab and one high-roof sleeper cab for model year 2021, at least two high-roof day cabs and two high-roof sleeper cabs for model year 2024, and at least three high-roof day cabs and three high-roof sleeper cabs for model year 2027. These test requirements are cumulative; for example, you may meet these requirements by testing two vehicles to support model year 2021 certification and four additional vehicles to support model year 2023 certification. For any untested tractor models, apply the value of F alt-aero from the tested tractor model that best represents the aerodynamic characteristics of the untested tractor model, consistent with good engineering judgment. Testing under this paragraph (b)(5) continues to be valid for later model years until you change the tractor model in a way that causes the test results to no longer represent production vehicles. You must also determine unique values of F alt-aero for low-roof and mid-roof tractors if you determine C d A values based on low or mid-roof tractor testing as shown in §1037.520(b)(3)(ii). For Phase 1 testing, if good engineering judgment allows it, you may calculate a single, constant value of F alt-aero for your whole product line by dividing the coastdown drag area, C d A coastdown , by drag area from your alternate method, C d A alt.
(6) Determine F alt-aero to at least three decimal places. For example, if your coastdown testing results in a drag area of 6.430, but your wind tunnel method results in a drag area of 6.200, F alt-aero would be 1.037 (or a higher value you declare).
(7) If a tractor and trailer cannot be configured to meet the gap requirements specified in §1037.501(g)(1)(ii), test with the trailer positioned as close as possible to the specified gap dimension and use good engineering judgment to correct the results to be equivalent to a test configuration meeting the specified gap dimension. For example, we may allow you to correct your test output using an approved alternate method or substitute a test vehicle that is capable of meeting the required specifications and is otherwise aerodynamically equivalent. The allowance in this paragraph (b)(7) applies for certification, confirmatory testing, SEA, and all other testing to demonstrate compliance with standards.
(8) You may ask us for preliminary approval of your coastdown testing under §1037.210. We may witness the testing.
(c) Yaw sweep corrections. Aerodynamic features can have a different effectiveness for reducing wind-averaged drag than is predicted by zero-yaw drag. The following procedures describe how to determine a tractor's C A values to account for wind-averaged drag as specified in §1037.520:
(1) Apply the following method for all Phase 2 and later testing with an alternate method:
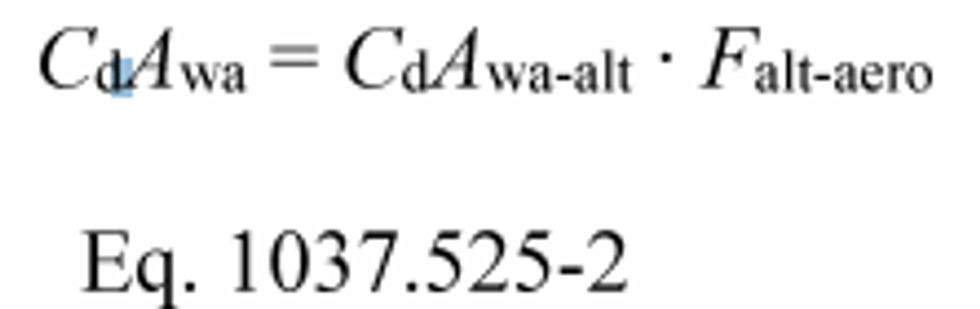
(i) Calculate the wind-averaged drag area from the alternate method, C A , using an average of measurements at −4.5 and +4.5 degrees.
(ii) Determine your wind-averaged drag area, C A , rounded to one decimal place, using the following equation:
(2) Apply the following method for Phase 2 and later coastdown testing other than coastdown testing used to establish F alt-aero :
(i) Determine your drag area at the effective yaw angle from coastdown, C A (ψeff).
(ii) Use an alternate method to calculate the ratio of the wind-averaged drag area, C A (using an average of measurements at −4.5 and +4.5 degrees) to the drag area at the effective yaw angle, C A (ψeff).
(iii) Determine your wind-averaged drag area, C A , rounded to one decimal place, using the following equation:
(3) Different approximations apply for Phase 1. For Phase 1 testing, you may correct your zero-yaw drag area as follows if the ratio of the zero-yaw drag area divided by yaw-sweep drag area for your vehicle is greater than 0.8065 (which represents the ratio expected for a typical Class 8 high-roof sleeper cab):
(i) Determine the zero-yaw drag area, C A , and the yaw-sweep drag area for your vehicle using the same alternate method as specified in this subpart. Measure the drag area for 0°, −6°, and +6°. Use the arithmetic mean of the −6° and +6° drag areas as the ±6° drag area, C A .
(ii) Calculate your yaw-sweep correction factor, CF ys, using the following equation:
(iii) Calculate your corrected drag area for determining the aerodynamic bin by multiplying the measured zero-yaw drag area by CF , as determined using Eq. 1037.525-4, as applicable. You may apply the correction factor to drag areas measured using other procedures. For example, apply CF to drag areas measured using the coastdown method. If you use an alternate method, apply an alternate correction, F , and calculate the final drag area using the following equation:
(iv) You may ask us to apply CF to similar vehicles incorporating the same design features.
(v) As an alternative, you may calculate the wind-averaged drag area according to SAE J1252 (incorporated by reference, see §1037.810) and substitute this value into Eq. 1037.525-4 for the ±6° drag area.
(d) Approval of alternate methods. You must obtain preliminary approval before using any method other than coastdown testing to quantify aerodynamic drag. We will approve your request if you show that your procedures produce data that are the same as or better than coastdown testing with respect to repeatability and unbiased correlation. Note that the correlation is not considered to be biased if there is a bias before correction, but you remove the bias using F. Send your request for approval to the Designated Compliance Officer. Keep records of the information specified in this paragraph (d). Unless we specify otherwise, include this information with your request. You must provide any information we require to evaluate whether you may apply the provisions of this section. Include additional information related to your alternate method as described in §§1037.530 through 1037.534. If you use a method other than those specified in this subpart, include all the following information, as applicable:
(1) Official name/title of the procedure.
(2) Description of the procedure.
(3) Cited sources for any standardized procedures that the method is based on.
(4) Description and rationale for any modifications/deviations from the standardized procedures.
(5) Data comparing the procedure to the coastdown reference procedure.
(6) Additional information specified for the alternate methods described in §§1037.530 through 1037.534 as applicable to this method (e.g., source location/address, background/history).
[86 FR 34473, Jun. 29, 2021; 89 FR 29782, Apr. 22, 2024]
§1037.527 Aerodynamic measurements for vocational vehicles.
This section describes an optional methodology for determining improved aerodynamic drag area, CdA , for vocational vehicles, as described in §1037.520(m), rather than using the assigned values. A vocational vehicle's aerodynamic performance is based on a CdA value relative to a baseline vehicle. Determine a dA value by performing A to B testing as follows:
(a) Use any of the procedures described in this subpart, with appropriate adjustments, for calculating drag area.
(b) Determine a baseline CdA value for a vehicle representing a production configuration without the aerodynamic improvement. Repeat this testing and measure CdA for a vehicle with the improved aerodynamic design.
(c) Use good engineering judgment to perform paired tests that accurately demonstrate the reduction in aerodynamic drag associated with the improved design.
(d) Measure CdA in m 2 to two decimal places. Calculate dA by subtracting the drag area for the test vehicle from the drag area for the baseline vehicle.
[89 FR 29783, Apr. 22, 2024]
§1037.528 Coastdown procedures for calculating drag area (CdA).
The coastdown procedures in this section describe how to calculate drag area, C d A, for Phase 2 tractors, trailers, and vocational vehicles, subject to the provisions of §§1037.525 through 1037.527. These procedures are considered the reference method for tractors, but an alternate method for trailers. Follow the provisions of Sections 1 through 9 of SAE J2263 (incorporated by reference in §1037.810), with the clarifications and exceptions described in this section. Several of these exceptions are from SAE J1263 (incorporated by reference in §1037.810). The coastdown procedures in 40 CFR 1066.310 apply instead of the provisions of this section for Phase 1 tractors.
(a) TThe terms and variables identified in this section have the meaning given in SAE J1263 and SAE J2263 unless specified otherwise.
(b) To determine C d A values for a tractor, perform coastdown testing with a tractor-trailer combination using the manufacturer's tractor and a standard trailer. To determine C d A values for a trailer, perform coastdown testing with a tractor-trailer combination using a standard tractor. Prepare tractors and trailers for testing as follows:
(1) Install instrumentation for performing the specified measurements.
(2) After adding vehicle instrumentation, verify that there is no brake drag or other condition that prevents the wheels from rotating freely. Do not apply the parking brake at any point between this inspection and the end of the measurement procedure.
(3) Install tires mounted on steel rims in a dual configuration (except for steer tires). The tires must —
(i) Be SmartWay-Verified or have a coefficient of rolling resistance at or below 5.1 kg/metric ton.
(ii) Have accumulated at least 2,000 miles but have no less than 50 percent of their original tread depth, as specified for truck cabs in SAE J1263.
(iii) Not be retreads or have any apparent signs of chunking or uneven wear.
(iv) Be size 295/75R22.5 or 275/80R22.5.
(v) Be inflated to the proper tire pressure as specified in Sections 6.6 and 8.1 of SAE J2263.
(vi) Be of the same tire model for a given axle.
(4) Perform an inspection or wheel alignment for both the tractor and the trailer to ensure that wheel position is within the manufacturer's specifications.
(c) The test condition specifications described in Sections 7.1 through 7.4 of SAE J1263 apply, with certain exceptions and additional provisions as described in this paragraph (c). These conditions apply to each run separately.
(1) We recommend that you not perform coastdown testing if winds are expected to exceed 6.0 mi/hr.
(2) The average of the component of the wind speed parallel to the road must not exceed 6.0 mi/hr. This constraint is in addition to those in Section 7.3 of SAE J1263.
(3) If road grade is greater than 0.02% over the length of the test surface, you must determine elevation as a function of distance along the length of the test surface and incorporate this into the analysis.
(4) Road grade may exceed 0.5% for limited portions of the test surface as long as it does not affect coastdown results, consistent with good engineering judgment.
(5) The road surface temperature must be at or below 50°C. Use good engineering judgment to measure road surface temperature.
(d) C d A calculations are based on measured speed values while the vehicle coasts down through a high-speed range from 70 to 60 mi/hr, and through a low-speed range from 20 to 10 mi/hr. Disable any vehicle speed limiters that prevent travel above 72 mi/hr. Measure vehicle speed at a minimum recording frequency of 10 Hz, in conjunction with time-of-day data. Determine vehicle speed using either of the following methods:
(1) Complete coastdown runs. Operate the vehicle at a top speed above 72.0 mi/hr and allow the vehicle to coast down to 8.0 mi/hr or lower. Collect data for the high-speed range over a test segment that includes speeds from 72.0 down to 58.0 mi/hr, and collect data for the low-speed range over a test segment that includes speeds from 22.0 down to 8.0 mi/hr.
(2) Split coastdown runs. Collect data during a high-speed coastdown while the vehicle coasts through a test segment that includes speeds from 72.0 mi/hr down to 58.0 mi/hr. Similarly, collect data during a low-speed coastdown while the vehicle coasts through a test segment that includes speeds from 22.0 mi/hr down to 8.0 mi/hr. Perform one high-speed coastdown segment or two consecutive high-speed coastdown segments in one direction, followed by the same number of low-speed coastdown segments in the same direction, and then perform that same number of measurements in the opposite direction. You may not split runs as described in Section 9.3.1 of SAE J2263 except as allowed under this paragraph (d)(2).
(e) Measure wind speed, wind direction, air temperature, and air pressure at a recording frequency of 10 Hz, in conjunction with time-of-day data. Use at least one stationary anemometer and suitable data loggers meeting SAE J1263 specifications, subject to the following additional specifications for the anemometer placed along the test surface:
(1) You must start a coastdown measurement within 24 hours after completing zero-wind and zero-angle calibrations.
(2) Place the anemometer at least 50 feet from the nearest tree and at least 25 feet from the nearest bush (or equivalent features). Position the anemometer adjacent to the test surface, near the midpoint of the length of the track, between 2.5 and 3.0 body widths from the expected location of the test vehicle's centerline as it passes the anemometer. Record the location of the anemometer along the test track, to the nearest 10 feet.
(3) Mount the anemometer at a height that is within 6 inches of half the test vehicle's body height.
(4) The height of vegetation surrounding the anemometer may not exceed 10% of the anemometer's mounted height, within a radius equal to the anemometer's mounted height.
(f) Measure air speed and relative wind direction (yaw angle) onboard the vehicle at a minimum recording frequency of 10 Hz, in conjunction with time-of-day data, using an anemometer and suitable data loggers that meet the requirements of Sections 5.4 of SAE J2263. The yaw angle must be measured to a resolution and accuracy of ±0.5°. Mount the anemometer such that it measures air speed at 1.5 meters above the top of the leading edge of the trailer. If obstructions at the test site do not allow for this mounting height, then mount the anemometer such that it measures air speed at least 0.85 meters above the top of the leading edge of the trailer.
(g) Perform the following calculations to filter and correct measured data:
(1) For any measured values not identified as outliers, use those measured values directly in the calculations specified in this section. Filter air speed, yaw angle, wind speed, wind direction, and vehicle speed measurements to replace outliers for every measured value as follows:
(i) Determine a median measured value to represent the measurement point and the measurements 3 seconds before and after that point. In the first and last three seconds of the coastdown run, use all available data to determine the median measured value. The measurement window for determining the median value will accordingly include 61 measurements in most cases, and will always include at least 31 measurements (for 10 Hz recording frequency).
(ii) Determine the median absolute deviation corresponding to each measurement window from paragraph (g)(1)(i) of this section. This generally results from calculating 61 absolute deviations from the median measured value and determining the median from those 61 deviations. Calculate the standard deviation for each measurement window by multiplying the median absolute deviation by 1.4826; calculate three standard deviations by multiplying the median absolute deviation by 4.4478. Note that the factor 1.4826 is a statistical constant that relates median absolute deviations to standard deviations.
(iii) A measured value is an outlier if the measured value at a given point differs from the median measured value by more than three standard deviations. Replace each outlier with the median measured value from paragraph (g)(1)(i) of this section. This technique for filtering outliers is known as the Hampel method.
(2) For each high-speed and each low-speed segment, correct measured air speed using the wind speed and wind direction measurements described in paragraph (e) of this section as follows:
(i) Calculate the theoretical air speed, v air,th, for each 10-Hz set of measurements using the following equation:
Where:
w = filtered wind speed.
v = filtered vehicle speed.
ø w = filtered wind direction. Let ø w = 0° for air flow in the first travel direction, with values increasing counterclockwise. For example, if the vehicle starts by traveling eastbound, then ø w = 270° means a wind from the south.
ø veh = the vehicle direction. Use ø veh = 0° for travel in the first direction, and use ø veh = 180° for travel in the opposite direction.
Example:
w = 7.1 mi/hr
v = 64.9 mi/hr
ø w = 47.0°
ø veh = 0°

v air,th = 69.93 mi/hr
(ii) Perform a linear regression using paired values of v air,th and measured air speed, v air,meas, to determine the air-speed correction coefficients, a 0 and a 1, based on the following equation:

(iii) Correct each measured value of air speed using the following equation:
(3) Correct measured air direction from all the high-speed segments using the wind speed and wind direction measurements described in paragraph (e) of this section as follows:
(i) Calculate the theoretical air direction, c; air,th, using the following equation:

Example:
w = 7.1 mi/hr
v = 64.9 mi/hr
ø w = 47.0°
ø veh = 0°

c air,th = 4.26°
(ii) Perform a linear regression using paired values of c air,th and measured air direction, c air,meas, to determine the air-direction correction coefficients, b 0 and b 1, based on the following equation:
(iii) Correct each measured value of air direction using the following equation:
(h) Determine drag area, C d A, using the following procedure instead of the procedure specified in Section 10 of SAE J1263:
(1) Calculate the vehicle's effective mass, M e, to account for rotational inertia by adding 56.7 kg to the measured vehicle mass, M, (in kg) for each tire making road contact.
(2) Operate the vehicle and collect data over the high-speed range and low-speed range as specified in paragraph (d)(1) or (2) of this section. If the vehicle has a speed limiter that prevents it from exceeding 72 mi/hr, you must disable the speed limiter for testing.
(3) Calculate mean vehicle speed at each speed start point (70 and 20 mi/hr) and end point (60 and 10 mi/hr) as follows:
(i) Calculate the mean vehicle speed to represent the start point of each speed range as the arithmetic average of measured speeds throughout the continuous time interval that begins when measured vehicle speed is less than 2.00 mi/hr above the nominal starting speed point and ends when measured vehicle speed reaches 2.00 mi/hr below the nominal starting speed point, expressed to at least two decimal places. Calculate the timestamp corresponding to the starting point of each speed range as the average timestamp of the interval.
(ii) Repeat the calculations described in paragraph (h)(3)(i) of this section corresponding to the end point speed (60 or 10 mi/hr) to determine the time at which the vehicle reaches the end speed, and the mean vehicle speed representing the end point of each speed range.
(iii) If you incorporate grade into your calculations, use the average values for the elevation and distance traveled over each interval.
(4) Calculate the road-load force, F, for each speed range using the following equation:

Where:
M e = the vehicle's effective mass.
v ͞ = average vehicle speed at the start or end of each speed range, as described in paragraph (h)(3) of this section.
t ͞ = timestamp at which the vehicle reaches the starting or ending speed expressed to at least one decimal place.
M = the vehicle's measured mass.
a g = acceleration of Earth's gravity, as described in 40 CFR 1065.630.
h ͞ = average elevation at the start or end of each speed range expressed to at least two decimal places.
D ͞ = distance traveled on the road surface from a fixed reference location along the road to the start or end of each speed range expressed to at least one decimal place.
Example:
M e = 17,129 kg (18 tires in contact with the road surface)
v ͞ start = 69.97 mi/hr = 31.28 m/s
v ͞ end = 59.88 mi/hr = 26.77 m/s
t ͞ start = 3.05 s
t ͞ end = 19.11 s
M = 16,108 kg
a g = 9.8061 m/s 2
h ͞ start = 0.044 m
h ͞ end = 0.547 m
D ͞ start = 706.8 ft = 215.4 m
D ͞ end = 2230.2 ft = 697.8 m

F = 4645.5 N
(5) Calculate the drive-axle spin loss force at high and low speeds, F spin[speed] , and determine F spin as follows:
(i) Use the results from the axle efficiency test described in §1037.560 for the drive axle model installed in the tractor being tested for this coastdown procedure.
(ii) Perform a second-order regression of axle power loss in W from only the zero-torque test points with wheel speed, f nwheel, in r/s from the axle efficiency test to determine coefficients c 0, c 1, and c 2.

(iii) Calculate F spin[speed] using the following equation:

Where:
v ͞ seg[speed] = the mean vehicle speed of all vehicle speed measurements in each low-speed and high-speed segment.
TRPM = tire revolutions per mile for the drive tire model installed on the tractor being tested according to §1037.520(c)(1).
Example:
v ͞ seghi = 28.86 m/s
v ͞ seglo = 5.84 m/s
TRPM = 508 r/mi = 0.315657 r/m
c 0 = −206.841 W
c 1 = 239.8279 W·s/r
c 2 = 21.27505 W·s 2/r 2

F spinhi = 129.7 N
F spinlo = 52.7 N
(iv) Calculate F spin using the following equation:
F spin = F spinhi − F spinlo
Eq. 1037.528-10
Example:
F spin = 129.7−52.7
F spin = 77.0 N
(6) Calculate the tire rolling resistance force at high and low speeds for steer, drive, and trailer axle positions, F TRR[speed,axle] , and determine F TRR , the rolling resistance difference between 65 mi/hr and 15 mi/hr, for each tire as follows:
(i) Conduct a stepwise coastdown tire rolling resistance test with three tires for each tire model installed on the vehicle using SAE J2452 (incorporated by reference in §1037.810) for the following test points (which replace the test points in Table 3 of SAE J2452):
| Step Number | Load (% of max) | Inflation pressure (% of max) |
|---|---|---|
| 1 | 20 | 100 |
| 2 | 55 | 70 |
| 3 | 85 | 120 |
| 4 | 85 | 100 |
| 5 | 100 | 95 |
(ii)Calculate FTRR [speed,axle] using the following equation:

Where:
n t,[axle] = number of tires at the axle position.
p [axle] = the inflation pressure set and measured on the tires at the axle position at the beginning of the coastdown test.
L [axle] = the load over the axle at the axle position on the coastdown test vehicle.
α [axle], β [axle], a [axle], b [axle], and c [axle] = regression coefficients from SAE J2452 that are specific to axle position.
Example:
n t,steer = 2
p steer = 758.4 kPa
L steer = 51421.2 N
α steer = −0.2435
β steer = 0.9576
a steer = 0.0434
b steer = 5.4·10−5
c steer = 5.53·10−7
n t,drive = 8
p drive = 689.5 kPa
L drive = 55958.4 N
α drive = −0.3146
β drive = 0.9914
a drive = 0.0504
b drive = 1.11·10−4
c drive = 2.86·10−7
n t,trailer = 8
p trailer = 689.5 kPa
L trailer = 45727.5 N
α trailer = −0.3982
β trailer = 0.9756
a trailer = 0.0656
b trailer = 1.51·10−4
c trailer = 2.94·10−7
v seghi = 28.86 m/s = 103.896 km/hr
v seglo = 5.84 m/s = 21.024 km/hr

F TRRhi,steer = 365.6 N
F TRRhi,drive = 431.4 N
F TRRhi,trailer = 231.7 N
F TRRlo,steer = 297.8 N
F TRRlo,drive = 350.7 N
F TRRlo,trailer = 189.0 N
(iii) Calculate F TRR[speed] by summing the tire rolling resistance calculations at a given speed for each axle position:

Example:
F TRRhi = 365.6 + 431.4 + 231.7 = 1028.7 N
F TRRlo = 297.8 + 350.7 + 189.0 = 837.5 N
(iv) Adjust F TRR[speed] to the ambient temperature during the coastdown segment as follows:
Where:
seg[speed] = the average ambient temperature during the coastdown segment, in °C.
Example:
F TRRhi = 1028.7 N
F TRRlo = 837.5 N
seghi = 25.5 °C
seglo = 25.1 °C
F TRRhi,adj = 1 + 0.006·(24−25.5)] = 1019.4 N
F TRRlo,adj = 837.5·[1 + 0.006·(24−25.1] = 832.0 N
(v) Determine the difference in rolling resistance between 65 mph and 15 mph, ΔF TRR, for each tire. Use good engineering judgment to consider the multiple results. For example, you may ignore the test results for the tires with the highest and lowest differences and use the result from the remaining tire. Determine ΔF TRR as follows:
Example:
ΔF TRR = 1019.4−832.0 = 187.4 N
(7) Square the air speed measurements and calculate average squared air speed during each speed range for each run,v ͞ 2 air,hi and v ͞ 2 air,lo.
(8) Average the F lo and v ͞ 2 air,lo values for each pair of runs in opposite directions. If running complete coastdowns as described in paragraph (d)(1) or one high-speed segment per direction as described in paragraph (d)(2), average every two F lo and v ͞ 2 air,lo values. If running two high-speed segments per direction as described in paragraph (d)(2), average every four F lo and v ͞ 2 air,lo values. Use these values as F lo,pair and v ͞ 2 air,lo,pair in the calculations in this paragraph (h) to apply to each of the two or four high-speed segments from the same runs as the low-speed segments used to determine F lo,pair and v ͞ 2 air,lo,pair.
(9) Calculate average air temperature T ͞ and air pressure P ͞ act during each high-speed run.
(10) Calculate drag area, C d A, in m 2 for each high-speed segment using the following equation, expressed to at least three decimal places:

Eq. 1037.528-16
Where:
F hi = road load force at high speed determined from Eq. 1037.528-7.
F lo,pair = the average of F lo values for a pair of opposite direction runs calculated as described in paragraph (h)(8) of this section.
F spin = the difference in drive-axle spin loss force between high-speed and low-speed coastdown segments as described in paragraph (h)(5) of this section.
F TRR = the difference in tire rolling resistance force between high-speed and low-speed coastdown segments as described in paragraph (h)(6) of this section.
v 2 air,lo,pair = the average of v 2 air,lo values for a pair of opposite direction runs calculated as described in paragraph (h)(8) of this section.
R = specific gas constant = 287.058 J/(kg·K).
T = mean air temperature expressed to at least one decimal Place.
P act = mean absolute air pressure expressed to at least one decimal place.
Example:
F h i = 4645.5 N
F lo,pair = 1005.0 N
ΔF spin = 77.0 N
ΔF TRR = 187.4 N
v 2 air,hi = 933.4 m 2 /s 2
v 2 air,lo,pair = 43.12 m 2 /s 2
R = 287.058 J/(kg·K)
T = 285.97 K
act = 101.727 kPa = 101727 Pa

(11) Calculate your final C d A value from the high-speed segments as follows:
(i) Eliminate all points where there were known equipment problems or other measurement problems.
(ii) Of the remaining points, calculate the median of the absolute value of the yaw angles, c med, and eliminate all C d A values that differ by more than 1.0° from c med.
(iii) Of the remaining points, calculate the mean and standard deviation of C d A and eliminate all values that differ by more than 2.0 standard deviations from the mean value.
(iv) There must be at least 24 points remaining. Of the remaining points, recalculate the mean yaw angle. Round the mean yaw angle to the nearest 0.1°. This final result is the effective yaw angle, c eff, for coastdown testing.
(v) For the same set of points, recalculate the mean C d A. This is the final result of the coastdown test, C d A coastdown(ψeff).
(i) [Reserved]
(j) Include the following information in your application for certification:
(1) The name, location, and description of your test facilities, including background/history, equipment and capability, and track and facility elevation, along with the grade and size/length of the track.
(2) Test conditions for each test result, including date and time, wind speed and direction, ambient temperature and humidity, vehicle speed, driving distance, manufacturer name, test vehicle/model type, model year, applicable family, tire type and rolling resistance, weight of tractor-trailer (as tested), and driver identifier(s).
(3) Average C d A and yaw angle results and all the individual run results (including voided or invalid runs).
[86 FR 34474, Jun. 29, 2021; 87 FR 64864, Oct. 26, 2022; 89 FR 29783, Apr. 22, 2024]
§1037.530 Wind-tunnel procedures for calculating drag area (C d A).
The wind-tunnel procedure specified in this section is considered to be the primary procedure for trailers, but is an alternate procedure for tractors.
This section describes an alternate method for calculating drag area, CdA , for tractors using wind tunnel testing.
(a) You may measure drag areas consistent with published SAE procedures as described in this section using any wind tunnel recognized by the Subsonic Aerodynamic Testing Association, subject to the provisions of §1037.525. If your wind tunnel does not meet the specifications described in this section, you may ask us to approve it as an alternate method under §1037.525(d). All wind tunnels and wind tunnel tests must meet the specifications described in SAE J1252 (incorporated by reference, see §1037.810), with the following exceptions and additional provisions:
(1) The Overall Vehicle Reynolds number, Re# , must be at least 1.0·10 6 . Tests for Reynolds effects described in Section 7.1 of SAE J1252 are not required.
(2) For full-scale wind tunnel testing, use good engineering judgment to select a trailer that is a reasonable representation of the trailer used for reference coastdown testing. For example, where your wind tunnel is not long enough to test the tractor with a standard 53 foot box van, it may be appropriate to use a shorter box van. In such a case, the correlation developed using the shorter trailer would only be valid for testing with the shorter trailer.
(3) For reduced-scale wind tunnel testing, use a one-eighth or larger scale model of a tractor and trailer that is sufficient to simulate airflow through the radiator inlet grill and across an engine geometry that represents engines commonly used in your test vehicle.
(b) Open-throat wind tunnels must also meet the specifications of SAE J2071 (incorporated by reference, see §1037.810).
(c) To determine CdA values, perform wind tunnel testing with a tractor-trailer combination using the manufacturer's tractor and a standard trailer. Use a moving/rolling floor if the facility has one. For Phase 1 tractors, conduct the wind tunnel tests at a zero yaw angle. For Phase 2 and later vehicles, conduct the wind tunnel tests by measuring the drag area at yaw angles of +4.5° and −4.5° and calculating the average of those two values.
(d) In your request to use wind tunnel testing, describe how you meet all the specifications that apply under this section, using terminology consistent with SAE J1594 (incorporated by reference, see §1037.810). If you request our approval to use wind tunnel testing even though you do not meet all the specifications of this section, describe how your method nevertheless qualifies as an alternate method under §1037.525(d) and include all the following information:
(1) Identify the name and location of the test facility for your wind tunnel method.
(2) Background and history of the wind tunnel.
(3) The wind tunnel's layout (with diagram), type, and construction (structural and material).
(4) The wind tunnel's design details: the type and material for corner turning vanes, air settling specification, mesh screen specification, air straightening method, tunnel volume, surface area, average duct area, and circuit length.
(5) Specifications related to the wind tunnel's flow quality: temperature control and uniformity, airflow quality, minimum airflow velocity, flow uniformity, angularity and stability, static pressure variation, turbulence intensity, airflow acceleration and deceleration times, test duration flow quality, and overall airflow quality achievement.
(6) Test/working section information: test section type ( e.g., open, closed, adaptive wall) and shape ( e.g., circular, square, oval), length, contraction ratio, maximum air velocity, maximum dynamic pressure, nozzle width and height, plenum dimensions and net volume, maximum allowed model scale, maximum model height above road, strut movement rate (if applicable), model support, primary boundary layer slot, boundary layer elimination method, and photos and diagrams of the test section.
(7) Fan section description: fan type, diameter, power, maximum angular speed, maximum speed, support type, mechanical drive, and sectional total weight.
(8) Data acquisition and control (where applicable): acquisition type, motor control, tunnel control, model balance, model pressure measurement, wheel drag balances, wing/body panel balances, and model exhaust simulation.
(9) Moving ground plane or rolling road (if applicable): construction and material, yaw table and range, moving ground length and width, belt type, maximum belt speed, belt suction mechanism, platen instrumentation, temperature control, and steering.
(10) Facility correction factors and purpose.
[86 FR 34476, Jun. 29, 2021; 89 FR 29784, Apr. 22, 2024]
§1037.532 Using computational fluid dynamics for calculating drag area (C d A).
This section describes an alternate method for calculating drag area, CdA, for tractors using commercially available computational fluid dynamics (CFD) software.
(a) For Phase 2 and later vehicles, use SAE J2966 (incorporated by reference, see §1037.810), with the following clarifications and exceptions:
(1) Vehicles are subject to the requirement to meet standards based on the average of testing at yaw angles of +4.5° and −4.5°; however, you may submit your application for certification with CFD results based on only one of those yaw angles.
(2) For CFD code with a Navier-Stokes based solver, follow the additional steps in paragraph (d) of this section. For Lattice-Boltzmann based CFD code, follow the additional steps in paragraph (e) of this section.
(3) Simulate a Reynolds number of 5.1 million (based on a 102-inch trailer width) and an air speed of 65 mi/hr.
(4) Perform an open-road simulation (not the Wind Tunnel Simulation).
(5) Use a free stream turbulence intensity of 0.0%.
(6) Choose time steps that can accurately resolve intrinsic flow instabilities, consistent with good engineering judgment.
(7) The result must be drag area (CdA), not drag coefficient (Cd), based on an air speed of 65 mi/hr.
(8) Submit information as described in paragraph (g) of this section.
(b) For Phase 1 tractors, apply the procedures as specified in paragraphs (c) through (f) of this section. Paragraphs (c) through (f) apply for Phase 2 and later vehicles only as specified in paragraph (a) of this section.
(c) To determine CdA values, perform CFD modeling based on a tractor-trailer combination using the manufacturer's tractor and a standard trailer. Perform all CFD modeling as follows:
(1) Specify a blockage ratio at or below 0.2% to simulate open-road conditions.
(2) Assume zero yaw angle.
(3) Model the tractor with an open grill and representative back pressures based on available data describing the tractor's pressure characteristics.
(4) Enable the turbulence model and mesh deformation.
(5) Model tires and ground plane in motion to simulate a vehicle moving forward in the direction of travel.
(6) Apply the smallest cell size to local regions on the tractor and trailer in areas of high flow gradients and smaller-geometry features (e.g., the A-pillar, mirror, visor, grille and accessories, trailer-leading edge, trailer-trailing edge, rear bogey, tires, and tractor-trailer gap).
(7) Simulate a vehicle speed of 55 mi/hr.
(d) Take the following steps for CFD code with a Navier-Stokes formula solver:
(1) Perform an unstructured, time-accurate analysis using a mesh grid size with a total volume element count of at least 50 million cells of hexahedral and/or polyhedral mesh cell shape, surface elements representing the geometry consisting of no less than 6 million elements, and a near-wall cell size corresponding to a y+ value of less than 300.
(2) Perform the analysis with a turbulence model and mesh deformation enabled (if applicable) with boundary layer resolution of ±95%. Once the results reach this resolution, demonstrate the convergence by supplying multiple, successive convergence values for the analysis. The turbulence model may use k-epsilon (k-ε), shear stress transport k-omega (SST k-ω), or other commercially accepted methods.
(e) For Lattice-Boltzmann based CFD code, perform an unstructured, time-accurate analysis using a mesh grid size with total surface elements of at least 50 million cells using cubic volume elements and triangular and/or quadrilateral surface elements with a near-wall cell size of no greater than 6 mm on local regions of the tractor and trailer in areas of high flow gradients and smaller geometry features, with cell sizes in other areas of the mesh grid starting at twelve millimeters and increasing in size from this value as the distance from the tractor and trailer increases.
(f) You may ask us to allow you to perform CFD analysis using parameters and criteria other than those specified in this section, consistent with good engineering judgment. In your request, you must demonstrate that you are unable to perform modeling based on the specified conditions (for example, you may have insufficient computing power, or the computations may require inordinate time), or you must demonstrate that different criteria (such as a different mesh cell shape and size) will yield better results. In your request, you must also describe your recommended alternative parameters and criteria, and describe how this approach will produce results that adequately represent a vehicle's in-use performance. We may require that you supply data demonstrating that your selected parameters and criteria will provide a sufficient level of detail to yield an accurate analysis. If you request an alternative approach because it will yield better results, we may require that you perform CFD analysis using both your recommended criteria and parameters and the criteria and parameters specified in this section to compare the resulting key aerodynamic characteristics, such as pressure profiles, drag build-up, and turbulent/laminar flow at key points around the tractor-trailer combination.
(g) Include the following information in your request to determine C d A values using CFD:
(1) The name of the software.
(2) The date and version number of the software.
(3) The name of the company producing the software and the corresponding address, phone number, and Web site.
(4) Identify whether the software uses Navier-Stokes or Lattice-Boltzmann equations.
(5) Describe the input values you will use to simulate the vehicle's aerodynamic performance for comparing to coastdown results.
[86 FR 34476, Jun. 29, 2021; 89 FR 29785, Apr. 22, 2024]
§1037.534 Constant-speed procedure for calculating drag area (C d A).
This section describes an alternate method for calculating drag area, CdA, for tractors using constant-speed aerodynamic drag testing.
(a) Test track. Select a test track that meets the specifications described in §1037.528(c)(3).
(b) Ambient conditions. At least two tests are required. For one of the tests, ambient conditions must remain within the specifications described in §1037.528(c) throughout the preconditioning and measurement procedure. The other tests must also meet those specifications except for the wind conditions. The wind conditions must be such that 80 percent of the values of yaw angle, ψ ͞ air, from the 50 mi/hr and 70 mi/hr test segments are between 4° and 10° or between −4° and −10°.
(c) Vehicle preparation. Perform testing with a tractor-trailer combination using the manufacturer's tractor and a standard trailer. Prepare the tractor-trailer combination for testing as described in §1037.528(b). Install measurement instruments meeting the requirements of 40 CFR part 1065, subpart C, that have been calibrated as described in 40 CFR part 1065, subpart D, as follows:
(1) Measure torque at each of the drive wheels using a hub torque meter or a rim torque meter. If testing a tractor with two drive axles, you may disconnect one of the drive axles from receiving torque from the driveshaft, in which case you would measure torque at only the wheels that receive torque from the driveshaft. Set up instruments to read engine speed for calculating angular speed at the point of the torque measurements, or install instruments for measuring the angular speed of the wheels directly.
(2) Install instrumentation to measure vehicle speed at 10 Hz, with an accuracy and resolution of 0.1 mi/hr. Also install instrumentation for reading engine speed from the engine's onboard computer.
(3) Mount an anemometer on the trailer as described in §1037.528(f).
(4) Fill the vehicle's fuel tanks so they are at maximum capacity at the start of the measurement procedure.
(5) Measure the weight over each axle to the nearest 20 kg, with a full fuel tank, including the driver and any passengers that will be in the vehicle during the test.
(d) Measurement procedure. The measurement sequence consists of vehicle preconditioning followed by stabilization and measurement over five consecutive constant-speed test segments with three different speed setpoints (10, 50, and 70 mi/hr). Each test segment is divided into smaller increments for data analysis.
(1) Precondition the vehicle and zero the torque meters as follows:
(i) If you are using rim torque meters, zero the torque meters by lifting each instrumented axle and recording torque signals for at least 30 seconds, and then drive the vehicle at 50 mi/hr for at least 30 minutes.
(ii) If you are using any other kind of torque meter, drive the vehicle at 50 mi/hr for at least 30 minutes, and then allow the vehicle to coast down from full speed to a complete standstill while the clutch is disengaged or the transmission is in neutral, without braking. Zero the torque meters within 60 seconds after the vehicle stops moving by recording the torque signals for at least 30 seconds, and directly resume vehicle preconditioning at 50 mi/hr for at least 1.25 mi.
(iii) You may calibrate instruments during the preconditioning drive.
(2) Perform testing as described in paragraph (d)(3) of this section over a sequence of test segments at constant vehicle speed as follows:
(i) (300 ±30) seconds in each direction at 10 mi/hr.
(ii) (450 ±30) seconds in each direction at 70 mi/hr.
(iii) (450 ±30) seconds in each direction at 50 mi/hr.
(iv) (450 ±30) seconds in each direction at 70 mi/hr.
(v) (450 ±30) seconds in each direction at 50 mi/hr.
(vi) (300 ±30) seconds in each direction at 10 mi/hr.
(3) When the vehicle preconditioning described in paragraph (d)(1) of this section is complete, stabilize the vehicle at the specified speed for at least 200 meters and start taking measurements. The test segment starts when you start taking measurements for all parameters.
(4) During the test segment, continue to operate the vehicle at the speed setpoint, maintaining constant speed and torque within the ranges specified in paragraph (e) of this section. Drive the vehicle straight with minimal steering; do not change gears. Perform measurements as follows during the test segment:
(i) Measure the angular speed of the driveshaft, axle, or wheel where the torque is measured, or calculate it from engine speed in conjunction with gear and axle ratios, as applicable.
(ii) Measure vehicle speed in conjunction with time-of-day data.
(iii) Measure ambient conditions, air speed, and air direction as described in §1037.528(e) and (f). Correct air speed and air direction as described in paragraphs (f)(1) and (2) of this section.
(5) You may divide a test segment into multiple passes by suspending and resuming measurements. Stabilize vehicle speed before resuming measurements for each pass as described in paragraph (d)(3) of this section. Analyze the data from multiple passes by combining them into a single sequence of measurements for each test segment.
(6) Divide measured values into even 10 second increments. If the last increment for each test segment is less than 10 seconds, disregard measured values from that increment for all calculations under this section.
(e) Validation criteria. Analyze measurements to confirm that the test is valid. Analyze vehicle speed and drive torque by calculating the mean speed and torque values for each successive 1 second increment, for each successive 10 second increment, and for each test segment. The test is valid if the data conform to all the following specifications:
(1) Vehicle speed. The mean vehicle speed for the test segment must be within 1.00 mi/hr of the speed setpoint. In addition, for testing at 50 mi/hr and 70 mi/hr, all ten of the 1 second mean vehicle speeds used to calculate a corresponding 10 second mean vehicle speed must be within ±0.2 mi/hr of that 10 second mean vehicle speed. Perform the same data analysis for testing at 10 mi/hr, but apply a validation threshold of ±0.1 mi/hr.
(2) Drive torque. All ten of the 1 second mean torque values used to calculate a corresponding 10 second mean torque value must be within ±50% of that 10 second mean torque value.
(3) Torque drift. Torque meter drift may not exceed ±1%. Determine torque meter drift by repeating the procedure described in paragraph (d)(1) of this section after testing is complete, except that driving the vehicle is necessary only to get the vehicle up to 50 mi/hr as part of coasting to standstill.
(f) Calculations. Analyze measured data for each time segment after time-aligning all the data. Use the following calculations to determine C d A:
(1) Onboard air speed. Correct onboard anemometer measurements for air speed using onboard measurements and measured ambient conditions as described in §1037.528(f), except that you must first divide the test segment into consecutive 10 second increments. Disregard data from the final increment of the test segment if it is less than 10 seconds. This analysis results in the following equation for correcting air speed measurements:
(2) Yaw angle. Correct the onboard anemometer measurements for air direction for each test segment as follows:
(i) Calculate arithmetic mean values for vehicle speed, v ͞ , wind speed, w ͞ , and wind direction, ϕ ͞ w, over each 10 second increment for each test segment. Disregard data from the final increment of the test segment if it is less than 10 seconds.
(ii) Calculate the theoretical air direction, ψ ͞ air,th, for each 10 second increment using the following equation:

Where:
ϕ veh = the vehicle direction, as described in §1037.528(f)(2).
Example:
w ͞ = 7.1 mi/hr
v ͞ = 69.9 mi/hr
ϕ ͞ w = 47.0°
ϕ ͞ veh = 0°

ψ ͞ air,th = 3.97°
(iii) Perform a linear regression using paired values of ψ ͞ air,th and measured air direction, ψ ͞ air,meas, from each 10 second increment for all 50 mi/hr and 70 mi/hr test segments to determine the air-direction correction coefficients, b 0 and b 1, based on the following equation:
(iv) For all 50 mi/hr and 70 mi/hr test segments, correct each measured value of air direction using the following equation:
(3) Road load force. (i) Average the sum of the corrected torques, the average of the wheel speed measurements, and the vehicle speed over every 10 second increment to determine, T ͞ total, f ͞ nwheel, and v ͞ .
(ii) Calculate a mean road load force, F ͞ RL[speed], for each 10 second increment using the following equation:

Where:
T ͞ total = mean of all corrected torques at a point in time.
v ͞ = mean vehicle speed.
f ͞ nwheel = mean wheel speed.
M = the measured vehicle mass.
a g = acceleration of Earth's gravity, as described in 40 CFR 1065.630.
h inc = elevation at the start or end of each 10 second increment expressed to at least two decimal places.
D inc = distance traveled on the road surface from a fixed reference location along the road to the start or end of each 10 second increment, expressed to at least one decimal place.
Example:
T ͞ total = 2264.9 N·m
v ͞ = 31.6 m/s
f ͞ nwheel =598.0 r/min
M = 16508 kg
a g = 9.8061 m/s 2
h inc,start = 0.044 m
h inc,end = 0.574 m
D inc,start = 215.4 m
D inc,end = 697.8 m

F ͞ RL70 = 4310.6 N
(4) Determination of drag area. Calculate a vehicle's drag area as follows:
(i) Calculate the mean road load force from all 10 second increments from the 10 mi/hr test segments from the test that was within the wind limits specified in §1037.528(c), F ͞ RL10,test. This value represents the mechanical drag force acting on the vehicle.
(ii) Calculate the mean aerodynamic force for each 10 second increment, F ͞ aero[speed], from the 50 mi/hr and 70 mi/hr test segments by subtracting F ͞ RL10,test from F ͞ RL[speed].
(iii) Average the corrected air speed and corrected yaw angle over every 10 second segment from the 50 mi/hr and 70 mi/hr test segments to determine v ͞ air and ψ ͞ air.
(iv) Calculate CdA for each 10 second increment from the 50 mi/hr and 70 mi/hr test segments using the following equation:
Where:
CdA[speed] = the mean drag area for each 10 second increment, i.
aero[speed] = mean aerodynamic force over a given 10 second increment = RL[speed] − RL10,test.
air[speed] = mean aerodynamic force over a given 10 second increment.
R = specific gas constant = 287.058 J/(kg·K).
= mean air temperature.
act = mean absolute air pressure.
Example:
RL70 = 4310.6 N
RL10,test = 900.1 N
aero70 = 4310.6−900.1 = 3410.5 N
2air70 = 1089.5 m2/s2
R = 287.058 J/(kg·K)
= 293.68 K
act = 101300 Pa
CdA70 = 5.210 m2
(v) Plot all C d A values from the 50 mi/hr and 70 mi/hr test segments against the corresponding values for corrected yaw angle for each 10 second increment. Create a regression based on a fourth-order polynomial regression equation of the following form:

(vi) Determine C d A wa-alt as the average of C d A values at 4.5° and −4.5° by applying Eq. 1037.534-7 at those angles.
(g) Documentation. Keep the following records related to the constant-speed procedure for calculating drag area:
(1) The measurement data for calculating C d A as described in this section.
(2) A general description and pictures of the vehicle tested.
(3) The vehicle's maximum height and width.
(4) The measured vehicle mass.
(5) Mileage at the start of the first test segment and at the end of the last test segment.
(6) The date of the test, the starting time for the first test segment, and the ending time for the last test segment.
(7) The transmission gear used for each test segment.
(8) The data describing how the test was valid relative to the specifications and criteria described in paragraphs (b) and (e) of this section.
(9) A description of any unusualevents, such as a vehicle passing the test vehicle, or any technical or human errors that may have affected the C d A determination without invalidating the test.
[86 FR 34476, Jun. 29, 2021; 88 FR 4642, Jan. 24, 2023; 89 FR 29785, Apr. 22, 2024]
§1037.540 Special procedures for testing vehicles with hybrid power take-off.
This section describes optional procedures for quantifying the reduction in fuel consumption for vehicles as a result of running power take-off (PTO) devices with a hybrid energy delivery system. See 40 CFR 1036.545 for powertrain testing requirements that apply for drivetrain hybrid systems. The procedures are written to test the PTO by ensuring that the engine produces all of the energy with no net change in stored energy (charge-sustaining), and for plug-in hybrid electric vehicles, also allowing for drawing down the stored energy (charge-depleting). The full charge-sustaining test for the hybrid vehicle is from a fully charged rechargeable energy storage system (RESS) to a depleted RESS and then back to a fully charged RESS. You must include all hardware for the PTO system. You may ask us to modify the provisions of this section to allow testing hybrid vehicles that use a technology other than batteries for storing energy, consistent with good engineering judgment. For plug-in hybrid electric vehicles, use a utility factor to properly weight charge-sustaining and charge-depleting operation as described in paragraph (f)(3) of this section.
(a) Select two vehicles for testing as follows:
(1) Select a vehicle with a hybrid energy delivery system to represent the range of PTO configurations that will be covered by the test data. If your test data will represent more than one PTO configuration, use good engineering judgment to select the configuration with the maximum number of PTO circuits that has the smallest potential reduction in fuel consumption.
(2) Select an equivalent conventional vehicle as specified in §1037.615.
(b) Measure PTO emissions from the fully warmed-up conventional vehicle as follows:
(1) Without adding a restriction, instrument the vehicle with pressure transducers at the outlet of the hydraulic pump for each circuit. Perform pressure measurements with a frequency of at least 1 Hz.
(2) Operate the PTO system with no load for at least 15 seconds. Measure gauge pressure and record the average value over the last 10 seconds (p ͞ min). For hybrid PTO systems the measured pressure with no load is typically zero. Apply maximum operator demand to the PTO system until the pressure relief valve opens and pressure stabilizes; measure gauge pressure and record the average value over the last 10 seconds (p ͞ max).
(3) Denormalize the PTO duty cycle in appendix B of this part using the following equation:

Where:
p refi = the reference pressure at each point i in the PTO cycle.
p i = the normalized pressure at each point i in the PTO cycle (relative to max).
max = the mean maximum pressure measured in paragraph (b)(2) of this section.
min = the mean minimum pressure measured in paragraph (b)(2) of this section.
(4) If the PTO system has two circuits, repeat paragraph (b)(2) and (3) of this section for the second PTO circuit.
(5) Install a system to control pressures in the PTO system during the cycle.
(6) Start the engine.
(7) Depending on the number of circuits the PTO system has, operate the vehicle over one or concurrently over both of the denormalized PTO duty cycles in appendix B of this part. Measure emissions during operation over each duty cycle using the provisions of 40 CFR part 1066.
(8) Measured pressures must meet the cycle-validation specifications in the following table for each test run over the duty cycle:
| Parameter a | Pressure |
|---|---|
| Slope, a 1 | 0.950 ≤ a 1 ≤1.030. |
| Absolute value of intercept, | a 0 | | ≤2.0% of maximum mapped pressure. |
| Standard error of the estimate, SEE | ≤10% of maximum mapped pressure. |
| Coefficient of determination, r | ≥0.970. |
| a Determine values for specified parameters as described in 40 CFR 1065.514(e) by comparing measured values to denormalized pressure values from the duty cycle in appendix B of this part. | |
(c) Measure PTO emissions from the fully warmed-up hybrid vehicle as follows:
(1) Perform the steps in paragraphs (b)(1) through (5) of this section.
(2) Prepare the vehicle for testing by operating it as needed to stabilize the RESS at a full state of charge (or equivalent for vehicles that use a technology other than batteries for storing energy).
(i) For plug-in hybrid electric vehicles, we recommend charging the battery with an external electrical source.
(ii) For other vehicles, we recommend running back-to-back PTO tests until engine operation is initiated to charge the RESS. The RESS should be fully charged once engine operation stops. The ignition should remain in the “on” position.
(3) Turn the vehicle and PTO system off while the sampling system is being prepared.
(4) Turn the vehicle and PTO system on such that the PTO system is functional, whether it draws power from the engine or a battery.
(5) Operate the vehicle over one or both of the denormalized PTO duty cycles without turning the vehicle off, until the engine starts and then shuts down. This may require running multiple repeats of the PTO duty cycles. For non-PHEV systems that are not plug-in hybrid systems, the test cycle is completed once the engine shuts down. For plug-in hybrid systems, continue running until the PTO hybrid is running in a charge-sustaining mode such that the “End of Test” requirements defined in 40 CFR 1066.501(a)(3) are met. Measure emissions as described in paragraph (b)(7) of this section. Use good engineering judgment to minimize the variability in testing between the two types of vehicles.
(6) For plug-in hybrid electric vehicles, follow 40 CFR 1066.501(a)(3) to divide the test into charge-depleting and charge-sustaining operation.
(7) Apply cycle-validation criteria as described in paragraph (b)(8) of this section to both charge-sustaining and charge-depleting operation.
(d) Calculate the equivalent distance driven based on operating time for each section of the PTO portion of the test as applicable by determining the time of the test and applying the conversion factor in paragraph (d)(4) of this section. For testing where fractions of a cycle were run (for example, where three cycles are completed and the halfway point of a fourth PTO cycle is reached before the engine starts and shuts down again), calculate the time of the test, t test, as follows:
(1) Add up the time run for all complete tests.
(2) For fractions of a test, use the following equation to calculate the time:
Where:
i = an indexing variable that represents one recorded value.
N = number of measurement intervals.
p circuit-1, = normalized pressure command from circuit 1 of the PTO cycle for each point, i, starting from i = 1.
p circuit-2, = normalized pressure command from circuit 2 of the PTO cycle for each point, i, starting from i = 1. Let circuit-2 = 0 if there is only one circuit.
circuit-1 = the mean normalized pressure command from circuit 1 over the entire PTO cycle.
circuit-2 = the mean normalized pressure command from circuit 2 over the entire PTO cycle. Let circuit-2 = 0 if there is only one circuit.
Δt = the time interval between measurements. For example, at 100 Hz, Δt = 0.0100 seconds.
(3) Sum the time from the complete cycles and from the partial cycle.
(4) Divide the total PTO operating time from paragraph (d)(3) of this section by a conversion factor of 0.0144 hr/mi for Phase 1 and 0.0217 hr/mi for Phase 2 and later to determine the equivalent distance driven. The conversion factors are based on estimates of average vehicle speed and PTO operating time as a percentage of total engine operating time; the Phase 2 and later conversion factor is calculated from an average speed of 27.1 mi/hr and PTO operation 37% of engine operating time, as follows:

Eq. 1037.540-2a
(e) For Phase 1, calculate combined cycle-weighted emissions of the four duty cycles for vocational vehicles, for both the conventional and hybrid PTO vehicle tests, as follows:
(1) Calculate the CO2 emission rates in grams per test without rounding for both the conventional vehicle and the charge-sustaining and charge-depleting portions of the test for the hybrid vehicle as applicable.
(2) Divide the CO2 mass from the PTO cycle by the distance determined in paragraph (d)(4) of this section and the standard payload as defined in §1037.801 to get the CO2 emission rate in g/ton-mile. For plug-in hybrid electric vehicles follow paragraph (f)(3) of this section to calculate utility factor weighted CO2 emissions in g/ton-mile.
(3) Calculate the g/ton-mile emission rate for the driving portion of the test specified in §1037.510 and add this to the CO2 g/ton-mile emission rate for the PTO portion of the test.
(4) Follow the provisions of §1037.615 to calculate improvement factors and benefits for advanced technologies.
(f) For Phase 2 and later, calculate the delta PTO fuel results for input into GEM during vehicle certification as follows:
(1) Determine fuel consumption by calculating the mass of fuel for each test in grams, mfuelPTO, without rounding, as described in 40 CFR 1036.540(d)(12) for both the conventional vehicle and the charge-sustaining and charge-depleting portions of the test for the hybrid vehicle as applicable.
(2) Divide the fuel mass by the applicable distance determined in paragraph (d)(4) of this section and the appropriate standard payload as defined in §1037.801 to determine the fuel-consumption rate in g/ton-mile.
(3) For plug-in hybrid electric vehicles calculate the utility factor weighted fuel-consumption rate in g/ton-mile, as follows:
(i) Determine the utility factor fraction for the PTO system from the table in appendix E of this part using interpolation based on the total time of the charge-depleting portion of the test as determined in paragraphs (c)(6) and (d)(3) of this section.
(ii) Weight the emissions from the charge-sustaining and charge-depleting portions of the test to determine the utility factor-weighted fuel mass, mfuelUF[cycle]plug-in, using the following equation:

Eq. 1037.540-3
Where:
i = an indexing variable that represents one test interval.
N = total number of charge-depleting test intervals.
mfuelPTOCD = total mass of fuel per ton-mile in the charge-depleting portion of the test for each test interval, i, starting from i = 1.
UFDCDi = utility factor fraction at time tCDi as determined in paragraph (f)(3)(i) of this section for each test interval, i, starting from i = 1.
j = an indexing variable that represents one test interval.
M = total number of charge-sustaining test intervals.
mfuelPTOCS = total mass of fuel per ton-mile in the charge-sustaining portion of the test for each test interval, j, starting from j = 1.
UFRCD = utility factor fraction at the full charge-depleting time, tCD, as determined by interpolating the utility factor curve in appendix E to this part. tCD is the sum of the time over N charge-depleting test intervals.
(4) Calculate the difference between the conventional PTO emissions result and the hybrid PTO emissions result for input into GEM.
[86 FR 34477, Jun. 29, 2021; 88 FR 4644, Jan. 24, 2023; 89 FR 29785, Apr. 22, 2024; 91 FR 7791, Feb. 18, 2026]
§1037.550 Powertrain testing.
See 40 CFR 1036.545 for the powertrain test procedure.
[91 FR 7791, Feb. 18, 2026]
§1037.551 Engine-based simulation of powertrain testing.
The regulations in 40 CFR 1036.545 describe how to measure fuel consumption over specific duty cycles with an engine coupled to a transmission; 40 CFR 1036.545(a)(5) describes how to create equivalent duty cycles for repeating those same measurements with just the engine. This section describes how to perform this engine testing to simulate the powertrain test. These engine-based measurements may be used for selective enforcement audits as described in §1037.301, as long as the test engine's operation represents the engine operation observed in the powertrain test. If we use this approach for confirmatory testing, when making compliance determinations, we will consider the uncertainty associated with this approach relative to full powertrain testing. Use of this approach for engine SEAs is optional for engine manufacturers.
(a) Use the procedures of 40 CFR part 1065 to set up the engine, measure emissions, and record data. Measure individual parameters and emission constituents as described in this section. For hybrid powertrains, correct for the net energy change of the energy storage device as described in 40 CFR 1066.501(a)(3).
(b) Operate the engine over the applicable engine duty cycles corresponding to the vehicle cycles specified in §1037.510(a)(2) for powertrain testing over the applicable vehicle simulations described in 40 CFR 1036.545(j). Warm up the engine to prepare for the transient test or one of the highway cruise cycles by operating it one time over one of the simulations of the corresponding duty cycle. Warm up the engine to prepare for the idle test by operating it over a simulation of the 65-mi/hr highway cruise cycle for 600 seconds. Within 60 seconds after concluding the warm up cycle, start emission sampling while the engine operates over the duty cycle. You may perform any number of test runs directly in succession once the engine is warmed up. Perform cycle validation as described in 40 CFR 1065.514 for engine speed, torque, and power.
(c) Calculate the mass of fuel consumed as described in 40 CFR 1036.545(n) and (o). Correct each measured value for the test fuel's mass-specific net energy content as described in 40 CFR 1036.550. Use these corrected values to determine whether the engine's emission levels conform to the declared fuel-consumption rates from the powertrain test.
[86 FR 34483, Jun. 29, 2021; 88 FR 4652, Jan. 24, 2023; 89 FR 29786, Apr. 22, 2024; 91 FR 7791, Feb. 18, 2026]
§1037.555 Special procedures for testing Phase 1 hybrid systems.
This section describes a powertrain testing procedure for simulating a chassis test with a pre-transmission or post-transmission hybrid system to perform A to B testing of Phase 1 vehicles. These procedures may also be used to perform A to B testing with non-hybrid systems. See 40 CFR 1036.545 for Phase 2 and later hybrid systems.
(a) Set up the engine according to 40 CFR 1065.110 to account for work inputs and outputs and accessory work.
(b) Collect CO2 emissions while operating the system over the test cycles specified in §1037.510(a)(1).
(c) Collect and measure emissions as described in 40 CFR part 1066. Calculate emission rates in grams per ton-mile without rounding. Determine values for A, B, C, and M for the vehicle being simulated as specified in 40 CFR part 1066. If you will apply an improvement factor or test results to multiple vehicle configurations, use values of A, B, C, M, ka , and r that represent the vehicle configuration with the smallest potential reduction in greenhouse gas emissions as a result of the hybrid capability.
(d) Calculate the transmission output shaft's angular speed target for the driver model, fnref,driver, from the linear speed associated with the vehicle cycle using the following equation:
Where:
vcycle = vehicle speed of the test cycle for each point, i, starting from i = 1.
ka = drive axle ratio, as declared by the manufacturer.
r = radius of the loaded tires, as declared by the manufacturer.
(e) Use speed control with a loop rate of at least 100 Hz to program the dynamometer to follow the test cycle, as follows:
(1) Calculate the transmission output shaft's angular speed target for the dynamometer, fnref,dyno, from the measured linear speed at the dynamometer rolls using the following equation:
Where:
T = instantaneous measured torque at the transmission output shaft.
Fbrake = instantaneous brake force applied by the driver model to add force to slow down the vehicle.
t = elapsed time in the driving schedule as measured by the dynamometer, in seconds.
(2) For each test, validate the measured transmission output shaft's speed with the corresponding reference values according to 40 CFR 1065.514(e). You may delete points when the vehicle is stopped. Perform the validation based on speed values at the transmission output shaft. For steady-state tests (55 mi/hr and 65 mi/hr cruise), apply cycle-validation criteria by treating the sampling periods from the two tests as a continuous sampling period. Perform this validation based on the following parameters:
| Parameter | Speed control |
|---|---|
| Slope, a1 | 0.950 ≤ a1 ≤ 1.030. |
| Absolute value of intercept, |a0| | ≤2.0% of maximum test speed. |
| Standard error of the estimate, SEE | ≤5% of maximum test speed. |
| Coefficient of determination, r2 | ≥0.970. |
(f) Send a brake signal when operator demand is equal to zero and vehicle speed is greater than the reference vehicle speed from the test cycle. Set a delay before changing the brake state to prevent the brake signal from dithering, consistent with good engineering judgment.
(g) The driver model should be designed to follow the cycle as closely as possible and must meet the requirements of §1037.510 for steady-state testing and 40 CFR 1066.425 for transient testing. The driver model should be designed so that the brake and throttle are not applied at the same time.
(h) Correct for the net energy change of the energy storage device as described in 40 CFR 1066.501(a)(3).
(i) Follow the provisions of §1037.510 to weight the cycle results and §1037.615 to calculate improvement factors and benefits for advanced technologies for Phase 1 vehicles.
[86 FR 34483, Jun. 29, 2021; 89 FR 29786, Apr. 22, 2024; 91 FR 7791, Feb. 18, 2026]
§1037.560 Axle efficiency test.
This section describes a procedure for mapping axle efficiency through a determination of axle power loss.
(a) You may establish axle power loss maps based on testing any number of axle configurations within an axle family as specified in §1037.232. You may share data across a family of axle configurations, as long as you test the axle configuration with the lowest efficiency from the axle family; this will generally involve testing the axle with the highest axle ratio. For vehicles with tandem drive axles, always test each drive axle separately. For tandem axles that can be disconnected, test both single-drive and tandem axle configurations. This includes 4×4 axles where one of the axles is disconnectable. Alternatively, you may analytically derive power loss maps for untested configurations within the same axle family as described in paragraph (h) of this section.
(b) Prepare an axle assembly for testing as follows:
(1) Select an axle assembly with less than 500 hours of operation before testing. Assemble the axle in its housing, along with wheel ends and bearings.
(2) If you have a family of axle assemblies with different axle ratios, you may test multiple configurations using a common axle housing, wheel ends, and bearings.
(3) Install the axle assembly on the dynamometer with an input shaft angle perpendicular to the axle.
(i) For axle assemblies with or without a locking main differential, test the axle assembly using one of the following methods:
(A) Lock the main differential and test it with one electric motor on the input shaft and a second electric motor on the output side of the output shaft that has the speed-reduction gear attached to it.
(B) Test with the main differential unlocked and with one electric motor on the input shaft and electric motors on the output sides of each of the output shafts.
(ii) For drive-through tandem-axle setups, lock the longitudinal and inter-wheel differentials.
(4) Add gear oil according to the axle manufacturer's instructions. If the axle manufacturer specifies multiple gear oils, select the one with the highest viscosity at operating temperature. You may use a lower-viscosity gear oil if we approve it. Fill the gear oil to a level that represents in-use operation. You may use an external gear oil conditioning system, as long as it does not affect measured values.
(5) Install equipment for measuring the bulk temperature of the gear oil in the oil sump or a similar location. Report temperature to the nearest 0.1 °C.
(6) Break in the axle assembly using good engineering judgment. Maintain gear oil temperature at or below 100 °C throughout the break-in period.
(7) You may drain the gear oil following the break-in procedure and repeat the filling procedure described in paragraph (b)(4) of this section. We will follow your practice for our testing.
(c) Measure input and output speed and torque as described in 40 CFR 1065.210(b). You must use a speed-measurement system that meets an accuracy of ±0.05% of point. Use torque transducers that meet an accuracy requirement of ±1.0 N·m for unloaded test points and ±0.2% of the maximum tested axle input torque or output torque, respectively, for loaded test points. Calibrate and verify measurement instruments according to 40 CFR part 1065, subpart D. Command speed and torque at a minimum of 10 Hz, and record all data, including bulk oil temperature, at a minimum of 1 Hz mean values.
(d) The test matrix consists of test points representing output torque and wheel speed values meeting the following specifications:
(1) Output torque includes both loaded and unloaded operation. For measurement involving unloaded output torque, also called spin loss testing, the wheel end is not connected to the dynamometer and is left to rotate freely; in this condition the input torque (to maintain constant wheel speed) equals the power loss. Test axles at a range of output torque values, as follows:
(i) 0, 500, 1000, 2000, 3000, and 4000 N·m for single drive axle applications for tractors and for vocational Heavy HDV with a single drive axle.
(ii) 0, 250, 500, 1000, 1500, and 2000 N·m for tractors, for vocational Heavy HDV with tandem drive axles, and for all vocational Light HDV or vocational Medium HDV.
(iii) You may exclude values that exceed your axle's maximum torque rating.
(2) Determine maximum wheel speed corresponding to a vehicle speed of 65 mi/hr based on the smallest tire (as determined using §1037.520(c)(1)) that will be used with the axle. If you do not know the smallest tire size, you may use a default size of 650 r/mi. Use wheel angular speeds for testing that include 50 r/min and speeds in 100 r/min increments that encompass the maximum wheel speed (150, 250, etc.).
(3) You may test the axle assembly at additional speed and torque setpoints.
(e) Determine axle efficiency using the following procedure:
(1) Maintain ambient temperature between (15 and 35) °C throughout testing. Measure ambient temperature within 1.0 m of the axle assembly. Verify that critical axle settings (such as bearing preload, backlash, and oil sump level) are within specifications before and after testing.
(2) Maintain gear oil temperature at (81 to 83) °C. You may alternatively specify a lower range by shifting both temperatures down by the same amount for any or all test points. We will test your axle assembly using the same temperature range(s) you specify for your testing. If you use interpolation for mapping, use the same temperature range for all test points used in the interpolation. You may use an external gear oil conditioning system, as long as it does not affect measured values.
(3) Use good engineering judgment to warm up the axle assembly by operating it until the gear oil is within the specified temperature range.
(4) Stabilize operation at each point in the test matrix for at least 10 seconds, then measure the input torque, output torque, and wheel angular speed for at least 10 seconds. Record arithmetic mean values for all three parameters over the measurement period. Calculate power loss as described in paragraph (f) of this section based on these values for mean input torque, T in, mean output torque, T out, and mean wheel angular speed, f nwheel, at each test point.
(5) Perform the map sequence described in paragraph (e)(4) of this section three times. Remove torque from the input shaft and allow the axle to come to a full stop before each repeat measurement.
(6) You may need to perform additional testing at a given test point based on a calculation of a confidence interval to represent repeatability at a 95% confidence level for that test point. If the confidence limit is greater than 0.10% for loaded tests or greater than 0.05% for unloaded tests, perform another repeat of measurements at that test point and recalculate the repeatability for the whole set of test results. Continue testing until the confidence interval is at or below the specified values for all test points. Calculate a confidence interval representing the repeatability in establishing a 95% confidence level using the following equation:
Where:
σPloss = standard deviation of power loss values at a given torque-speed setting (see 40 CFR 1065.602(c)).
N = number of repeat tests.
Pmax = maximum output torque setting from the test matrix.
Example:
σPloss = 0.1650 kW
N = 3
Pmax = 314.2000 kW
Confidence Interval = 0.0594%
(f) Calculate the mean power loss, P loss, at each test point as follows:
(1) Calculate P̄loss for each measurement at each test point as follows:
Where:
T in = mean input torque from paragraph (e)(4) of this section.
f nwheel = mean wheel angular speed from paragraph (e)(4) of this section in rad/s.
ka = drive axle ratio, expressed to at least the nearest 0.001.
T out = mean output torque from paragraph (e)(4) of this section. Let T out = 0 for all unloaded tests.
(2) Calculate P loss as the mean power loss from all measurements at a given test point.
(3) The following example illustrates a calculation of P loss:
T in,1 = 845.10 N·m
f nwheel,1 = 100.0 r/min = 10.472 rad/s
ka = 3.731
T out,1 = 3000.00 N·m
P loss,1 = 845.10 · 10.472 · 3.731 − 3000.00 · 10.472
P loss,1 = 1602.9 W = 1.6029 kW
P loss,2 = 1601.9 W = 1.6019 kW
P loss,3 = 1603.9 W = 1.6039 kW
(g) Create a table with the mean power loss, P loss, corresponding to each test point for input into GEM. Express wheel angular speed in r/min to one decimal place; express output torque in N·m to two decimal places; express power loss in kW to four decimal places.

(2) Record declared mean power loss values at or above the corresponding value calculated in paragraph (f) of this section. Use good engineering judgment to select values that will be at or above the mean power loss values for your production axles. Vehicle manufacturers will use these declared mean power loss values for certification. For vehicles with tandem drive axles, the GEM input is the sum of the power loss and output torque from the individual axles. For vehicles with a disconnectable axle, GEM uses separate inputs for single and tandem drive axle configurations.
(h) You may analytically derive axle power loss maps for untested configurations within an axle family as follows:
(1) Test at least three axle assemblies within the same family representing at least the smallest axle ratio, the largest axle ratio, and an axle ratio closest to the arithmetic mean from the two other tested axle assemblies. Test each axle assembly as described in this section at the same speed and torque setpoints. Test all axle assemblies using the same gear oil temperature range for each setpoint as described in paragraph (e)(2) of this section.
(2) Perform a second-order least-squares regression between declared power loss and axle ratio using each speed and torque setpoint described in paragraph (d) of this section for your tested axle assemblies. Use the declared power loss values from paragraph (g) of this section; however, for purposes of analytically deriving power loss maps under this paragraph (h), you must select declared values for the largest and smallest axle ratios in the axle family that are adjusted relative to the calculated values for mean power loss by the same multiplier. If the coefficent of the second-order term is negative, include testing from additional axle ratios, or increase your declared power loss for the largest and smallest axle ratios by the same multiplier as needed for the second-order term to become positive.
(3) Determine P loss of untested axles for each speed and torque setpoint based on a linear relationship between your declared power loss and axle ratio as follows:
(i) Determine the slope of the correlation line by connecting the declared power loss values for the smallest and largest axle ratios.
(ii) Fix the intercept for the correlation line by shifting it upward as needed so all the declared power loss values are on the correlation line or below it. Note that for cases involving three tested axle assemblies, the correlation line will always include the declared power loss for the smallest and largest axle ratio.
(4) Select declared values of P loss for untested configurations that are at or above the values you determined in paragraph (h)(3) of this section.
[86 FR 34484, Jun. 29, 2021; 87 FR 64864, Oct. 26, 2022; 88 FR 4652, Jan. 24, 2023; 89 FR 29787, Apr. 22, 2024; 91 FR 7791, Feb. 18, 2026]
§1037.565 Transmission efficiency test.
This section describes a procedure for mapping transmission efficiency through a determination of transmission power loss.
(a) You may establish transmission power loss maps based on testing any number of transmission configurations within a transmission family as specified in §1037.232. You may share data across any configurations within the family, as long as you test the transmission configuration with the lowest efficiency from the transmission family. Alternatively, you may ask us to approve analytically derived power loss maps for untested configurations within the same transmission family (see §1037.235(h)).
(b) Prepare a transmission for testing as follows:
(1) Select a transmission with less than 500 hours of operation before testing.
(2) Mount the transmission to the dynamometer such that the geared shaft in the transmission is aligned with the input shaft from the dynamometer.
(3) Add transmission oil according to the transmission manufacturer's instructions. If the transmission manufacturer specifies multiple transmission oils, select the one with the highest viscosity at operating temperature. You may use a lower-viscosity transmission oil if we approve it. Fill the transmission oil to a level that represents in-use operation. You may use an external transmission oil conditioning system, as long as it does not affect measured values.
(4) Include any internal and external pumps for hydraulic fluid and lubricating oil in the test. Determine the work required to drive an external pump according to 40 CFR 1065.210.
(5) Install equipment for measuring the bulk temperature of the transmission oil in the oil sump or a similar location.
(6) If the transmission is equipped with a torque converter, lock it for all testing performed in this section.
(7) Break in the transmission using good engineering judgment. Maintain transmission oil temperature at (87 to 93)°C for automatic transmissions and transmissions having more than two friction clutches, and at (77 to 83)°C for all other transmissions. You may ask us to approve a different range of transmission oil temperatures if you have data showing that it better represents in-use operation.
(c) Measure input and output shaft speed and torque as described in 40 CFR 1065.210(b). You must use a speed measurement system that meets an accuracy of ±0.05% of point. Accuracy requirements for torque transducers depend on the highest loaded transmission input and output torque as described in paragraph (d)(2) of this section. Use torque transducers for torque input measurements that meet an accuracy requirement of ±0.2% of the highest loaded transmission input for loaded test points and ±0.1% of the highest loaded transmission input torque for unloaded test points. For torque output measurements, torque transducers must meet an accuracy requirement of ±0.2% of the highest loaded transmission output torque for each gear ratio. Calibrate and verify measurement instruments according to 40 CFR part 1065, subpart D. Command speed and torque at a minimum of 10 Hz, and record all data, including bulk oil temperature, at a minimum of 1 Hz mean values.
(d) Test the transmission at input shaft speeds and torque setpoints as described in this paragraph (d). You may exclude lower gears from testing; however, you must test all the gears above the highest excluded gear. GEM will use default values for any untested gears. The test matrix consists of test points representing transmission input shaft speeds and torque setpoints meeting the following specifications for each tested gear:
(1) Test at the following transmission input shaft speeds:
(i) 600.0 r/min or transmission input shaft speed when paired with the engine operating at idle.
(ii) The transmission's maximum rated input shaft speed. You may alternatively select a value representing the highest expected in-use transmission input shaft speed.
(iii) Three equally spaced intermediate speeds. The intermediate speed points may be adjusted to the nearest 50 or 100 r/min. You may test any number of additional speed setpoints to improve accuracy.
(2) Test at certain transmission input torque setpoints as follows:
(i) Include one unloaded (zero-torque) setpoint.
(ii) Include one loaded torque setpoint between 75% and 105% of the transmission's maximum rated input shaft torque. However, you may use a lower torque setpoint as needed to avoid exceeding dynamometer torque limits, as long as testing accurately represents in-use performance. If your loaded torque setpoint is below 75% of the transmission's maximum rated input shaft torque, you must demonstrate that the sum of time for all gears where demanded engine torque is between your maximum torque setpoint and 75% of the transmission's maximum rated input shaft torque is no more than 10% of the time for each vehicle drive cycle specified in subpart F of this part. This demonstration must be made available upon request.
(iii) You may test at any number of additional torque setpoints to improve accuracy.
(iv) Note that GEM calculates power loss between tested or default values by linear interpolation, except that GEM may extrapolate outside of measured values to account for testing at torque setpoints below 75% as specified in paragraph (d)(2)(ii) of this section.
(3) In the case of transmissions that automatically go into neutral when the vehicle is stopped, also perform tests at 600 r/min and 800 r/min with the transmission in neutral and the transmission output fixed at zero speed.
(e) Determine transmission efficiency using the following procedure:
(1) Maintain ambient temperature between (15 and 35)°C throughout testing. Measure ambient temperature within 1.0 m of the transmission.
(2) Maintain transmission oil temperature as described in paragraph (b)(7) of this section.
(3) Use good engineering judgment to warm up the transmission according to the transmission manufacturer's specifications.
(4) Perform unloaded transmission tests by disconnecting the transmission output shaft from the dynamometer and letting it rotate freely. If the transmission adjusts pump pressure based on whether the vehicle is moving or stopped, set up the transmission for unloaded tests to operate as if the vehicle is moving.
(5) For transmissions that have multiple configurations for a given gear ratio, such as dual-clutch transmissions that can pre-select an upshift or downshift, set the transmission to operate in the configuration with the greatest power loss. Alternatively, test in each configuration and use good engineering judgment to calculate a weighted power loss for each test point under this section based on field data that characterizes the degree of in-use operation in each configuration.
(6) For a selected gear, operate the transmission at one of the test points from paragraph (d) of this section for at least 10 seconds. Measure the speed and torque of the input and output shafts for at least 10 seconds. You may omit measurement of output shaft speeds if your transmission is configured to not allow slip. Calculate arithmetic mean values for mean input shaft torque, T in , mean output shaft torque, T out , mean input shaft speed, f nin , and mean output shaft speed, f nout , for each point in the test matrix for each test. Repeat this stabilization, measurement, and calculation for the other speed and torque setpoints from the test matrix for the selected gear in any sequence. Calculate power loss as described in paragraph (f) of this section based on mean speed and torque values at each test point.
(7) Repeat the procedure described in paragraph (e)(6) of this section for all gears, or for all gears down to a selected gear. This section refers to an “operating condition” to represent operation at a test point in a specific gear.
(8) Perform the test sequence described in paragraphs (e)(6) and (7) of this section three times. You may do this repeat testing at any given test point before you perform measurements for the whole test matrix. Remove torque from the transmission input shaft and bring the transmission to a complete stop before each repeat measurement.
(9) You may need to perform additional testing at a given operating condition based on a calculation of a confidence interval to represent repeatability at a 95% confidence level at that operating condition. If the confidence interval is greater than 0.10% for loaded tests or greater than 0.05% for unloaded tests, perform another measurement at that operating condition and recalculate the repeatability for the whole set of test results. Continue testing until the confidence interval is at or below the specified values for all operating conditions. As an alternative, for any operating condition that does not meet this repeatability criterion, you may determine a maximum power loss instead of calculating a mean power loss as described in paragraph (g) of this section. Calculate a confidence interval representing the repeatability in establishing a 95% confidence level using the following equation:
σ Ploss = standard deviation of power loss values at a given operating condition (see 40 CFR 1065.602(c)).
N = number of repeat tests for an operating condition.
Prated = the transmission's rated input power for a given gear. For testing in neutral, use the value of Prated for the top gear.
Example:
σ Ploss = 0.1200 kW
N = 3
Prated = 314.2000 kW

Confidence Interval = 0.0432%
(f) Calculate the mean power Ploss , at each operating condition as follows:
(1) Calculate P loss for each measurement at each operating condition as follows:
T in = mean input shaft torque from paragraph (e)(6) of this section.
f nin = mean input shaft speed from paragraph (e)(6) of this section in rad/s.
T out = mean output shaft torque from paragraph (e)(6) of this section. Let T out = 0 for all unloaded tests.
f nout = mean output shaft speed from paragraph (e)(6) of this section in rad/s. Let f nout = 0 for all tests with the transmission in neutral. See paragraph (f)(2) of this section for calculating f nout as a function of f nin instead of measuring f nout .
(2) For transmissions that are configured to not allow slip, you may calculate f nout based on the gear ratio using the following equation:
Where:
kg = transmission gear ratio, expressed to at least the nearest 0.001.
(3) Calculate P loss as the mean power loss from all measurements at a given operating condition.
(4) The following example illustrates a calculation of P loss :
T in,1 = 1000.0 N·m
f nin,1 = 1000 r/min = 104.72 rad/sec
Tout,1 = 2654.5 N·m
f nout,1 = 361.27 r/min = 37.832 rad/s
P loss,1 = 1000.0·104.72−2654.5·37.832
P loss,1 = 4295 W = 4.295 kW
Ploss,2 = 4285 W = 4.285 kW
P loss,3 = 4292 W = 4.292 kW
(g) Create a table with the mean power loss, P loss , corresponding to each operating condition for input into GEM. Also include power loss in neutral for each tested engine's speed, if applicable. Express transmission input speed in r/min to one decimal place; express input torque in N·m to two decimal places; express power loss in kW to four decimal places. Record the following values:
(2) For any operating condition not meeting the repeatability criterion in paragraph (e)(9) of this section, record the maximum value of Ploss for that operating condition along with the corresponding values of Tin and fnin .
(h) Record declared power loss values at or above the corresponding value calculated in paragraph (f) of this section. Use good engineering judgment to select values that will be at or above the mean power loss values for your production transmissions. Vehicle manufacturers will use these declared mean power loss values for certification.
[86 FR 34486, Jun. 29, 2021; 87 FR 64864, Oct. 26, 2022; 91 FR 7792, Feb. 18, 2026]
§1037.570 Procedures to characterize torque converters.
GEM includes input values related to torque converters. This section describes a procedure for mapping a torque converter's capacity factors and torque ratios over a range of operating conditions. You may ask us to approve analytically derived input values based on this testing for additional untested configurations as described in §1037.235(h).
(a) Prepare a torque converter for testing as follows:
(1) Select a torque converter with less than 500 hours of operation before the start of testing.
(2) If the torque converter has a locking feature, unlock it for all testing performed under this section. If the torque converter has a slipping lockup clutch, you may ask us to approve a different strategy based on data showing that it represents better in-use operation.
(3) Mount the torque converter with a transmission to the dynamometer in series or parallel arrangement or mount the torque converter without a transmission to represent a series configuration.
(4) Add transmission oil according to the torque converter manufacturer's instructions, with the following additional specifications:
(i) If the torque converter manufacturer specifies multiple transmission oils, select the one with the highest viscosity at operating temperature. You may use a lower-viscosity transmission oil if we approve it.
(ii) Fill the transmission oil to a level that represents in-use operation. If you are testing the torque converter without the transmission, keep output pressure and the flow rate of transmission oil into the torque converter within the torque converter manufacturer's limits.
(iii) You may use an external transmission oil conditioning system, as long as it does not affect measured values.
(5) Install equipment for measuring the bulk temperature of the transmission oil in the oil sump or a similar location and at the torque converter inlet. If the torque converter is tested without a transmission, measure the oil temperature at the torque converter inlet.
(6) Break in the torque converter and transmission (if applicable) using good engineering judgment. Maintain transmission oil temperature at (87 to 93)°C. You may ask us to approve a different range of transmission oil temperatures if you have data showing that it better represents in-use operation.
(b) Measure pump and turbine shaft speed and torque as described in 40 CFR 1065.210(b). You must use a speed measurement system that meets an accuracy of ±0.1% of point or ±1 r/min, whichever is greater. Use torque transducers that meet an accuracy of ±1.0% of the torque converter's maximum rated input and output torque, respectively. Calibrate and verify measurement instruments according to 40 CFR part 1065, subpart D. Command speed and torque at a minimum of 10 Hz. Record all speed and torque data at a minimum of 1 Hz mean values. Note that this section relies on the convention of describing the input shaft as the pump and the output shaft as the turbine shaft.
(c) Determine torque converter characteristics based on a test matrix using either constant input speed or constant input torque as follows:
(1) Constant input speed. Test at constant input speed as follows:
(i) Select a fixed pump speed, ƒ npum , between (1000 and 2000) r/min.
(ii) Test the torque converter at multiple speed ratios, v, in the range of v = 0.00 to v = 0.95. Use a step width of 0.10 for the range of v = 0.00 to 0.60 and 0.05 for the range of v = 0.60 to 0.95. Calculate speed ratio, v, as turbine shaft speed divided by pump speed.
(2) Constant input torque. Test at constant input torque as follows:
(i) Set the pump torque, T pum , to a fixed positive value at ƒ npum = 1000 r/min with the torque converter's turbine shaft locked in a non-rotating state ( i.e., turbine's speed, n tur , = 0 r/min).
(ii) Test the torque converter at multiple speed ratios, v, in the range of v = 0.00 up to a value of ƒ ntur that covers the usable range of v . Use a step width of 0.10 for the range of v = 0.00 to 0.60 and 0.05 for the range of v = 0.60 to 0.95.
(3) You may limit the maximum speed ratio to a value below 0.95 if you have data showing this better represents in-use operation. You must use the step widths defined in paragraph (c)(1) or (2) of this section and include the upper limit as a test point. If you choose a value less than 0.60, you must test at least seven evenly distributed points between v = 0 and your new upper speed ratio.
(d) Characterize the torque converter using the following procedure:
(1) Maintain ambient temperature between (15 and 35)°C throughout testing. Measure ambient temperature within 1.0 m of the torque converter.
(2) Maintain transmission oil temperature as described in paragraph (a)(6) of this section. You may use an external transmission oil conditioning system, as long as it does not affect measured values.
(3) Use good engineering judgment to warm up the torque converter according to the torque converter manufacturer's specifications.
(4) Test the torque converter at constant input speed or constant input torque as described in paragraph (c) of this section. Operate the torque converter at v = 0.00 for (5 to 60) seconds, then measure pump torque, turbine shaft torque, angular pump speed, angular turbine shaft speed, and the transmission oil temperature at the torque converter inlet for (5 to 15) seconds. Calculate arithmetic mean values for pump torque, T pum , turbine shaft torque, T tur , angular pump speed, f npum , and angular turbine shaft speed, f ntur , over the measurement period. Repeat this stabilization, measurement, and calculation for the other speed ratios from the test matrix in order of increasing speed ratio. Adjust the speed ratio by increasing the angular turbine shaft speed.
(5) Complete a test run by performing the test sequence described in paragraph (d)(4) of this section two times.
(6) Invalidate the test run if the difference between the pair of mean torque values for the repeat tests at any test point differ by more than ±1 N·m or by more than ±5% of the average of those two values. This paragraph (d)(6) applies separately for mean pump torque and mean turbine shaft torque at each test point.
(7) Invalidate the test run if any calculated value for mean angular pump speed does not stay within ±5 r/min of the speed setpoint or if any calculated value for mean pump torque does not stay within ±5 N·m of the torque setpoint.
(e) Calculate the mean torque ratio, u , at each tested speed ratio, v, as follows:
(1) Calculate u at each tested speed ratio as follows:
Where:
T tur = mean turbine shaft torque from paragraph (d)(4) of this section.
T pum = mean pump torque from paragraph (d)(4) of this section.
(2) Calculate u as the average of the two values of at each tested speed ratio.
(3) The following example illustrates a calculation of u :
T tur,v=0,1 = 332.4 N·m
T pum,v=0,1 = 150.8 N·m
T tur,v=0,2 = 333.6 N·m
T pum,v=0,2 = 150.3 N·m
(f) Calculate the mean capacity factor, K, at each tested speed ratio, v , as follows:
(1) Calculate K at each tested speed ratio as follows:
Where:
f npum = mean angular pump speed from paragraph (d)(4) of this section.
T pum = mean pump torque from paragraph (d)(4) of this section.
(2) Calculate K as the average of the two values of K at each tested speed ratio.
(3) The following example illustrates a calculation of K:
f npum,v=0,1 = f npum,v=0,2 = 1000.0 r/min
T pum,v=0,1 = 150.8 N·m
(g) Create a table of GEM inputs showing u and K at each tested speed ratio, v . Express u to two decimal places; express K to one decimal place; express v to two decimal places.
[86 FR 34488, Jun. 29, 2021; 87 FR 64864, Oct. 26, 2022; 91 FR 7792, Feb. 18, 2026]
['Air Programs']
['Air Emissions']
UPGRADE TO CONTINUE READING