Compliance Just Got Easier: Stay ahead of regulatory changes with instant notifications on updates that matter.
['Heavy Equipment and Vehicles']
['Heavy Equipment and Vehicles']
07/06/2023

Copyright 2026 J. J. Keller & Associate, Inc. For re-use options please contact copyright@jjkeller.com or call 800-558-5011.
DEPARTMENT OF TRANSPORTATION
National Highway Traffic Safety Administration
49 CFR Parts 571 and 596
[Docket No. NHTSA–2023–0023]
RIN 2127–AM36
Federal Motor Carrier Safety Administration
[Docket No. FMCSA–2022–0171]
RIN 2126–AC49
Heavy Vehicle Automatic Emergency Braking; AEB Test Devices
AGENCY: National Highway Traffic Safety Administration (NHTSA), Federal Motor Carrier Safety Administration (FMCSA), Department of Transportation (DOT).
ACTION: Notice of proposed rulemaking (NPRM).
SUMMARY: This NPRM proposes to adopt a new Federal Motor Vehicle Safety Standard (FMVSS) to require automatic emergency braking (AEB) systems on heavy vehicles, i.e., vehicles with a gross vehicle weight rating greater than 4,536 kilograms (10,000 pounds). This notice also proposes to amend FMVSS No. 136 to require nearly all heavy vehicles to have an electronic stability control system that meets the equipment requirements, general system operational capability requirements, and malfunction detection requirements of FMVSS No. 136. An AEB system uses multiple sensor technologies and sub-systems that work together to sense when the vehicle is in a crash imminent situation and automatically applies the vehicle brakes if the driver has not done so or automatically applies more braking force to supplement the driver's applied braking. This NPRM follows NHTSA's 2015 grant of a petition for rulemaking from the Truck Safety Coalition, the Center for Auto Safety, Advocates for Highway and Auto Safety and Road Safe America, requesting that NHTSA establish a safety standard to require AEB on certain heavy vehicles. This NPRM also responds to a mandate under the Bipartisan Infrastructure Law, as enacted as the Infrastructure Investment and Jobs Act, directing the Department to prescribe an FMVSS that requires heavy commercial vehicles with FMVSS-required electronic stability control systems to be equipped with an AEB system, and also promotes DOT's January 2022 National Roadway Safety Strategy to initiate a rulemaking to require AEB on heavy trucks. This NPRM also proposes Federal Motor Carrier Safety Regulations requiring the electronic stability control and AEB systems to be on during vehicle operation.
DATES: Comments must be received on or before September 5, 2023.
Proposed compliance dates: NHTSA proposes a two-tiered phase-in schedule for meeting the proposed standard. For vehicles currently subject to FMVSS No. 136, “Electronic stability control systems for heavy vehicles,” any vehicle manufactured on or after the first September 1 that is three years after the date of publication of the final rule would be required to meet the proposed heavy vehicle AEB standard. For vehicles with a gross vehicle weight rating greater than 4,536 kilograms (10,000 pounds) not currently subject to FMVSS No. 136, any vehicle manufactured on or after the first September 1 that is four years after the date of publication of the final rule would be required to meet the proposed AEB requirements and the proposed amendments to the ESC requirements. Small-volume manufacturers, final-stage manufacturers, and alterers would be provided an additional year to comply with this proposal beyond the dates identified above.
FMCSA proposes that vehicles currently subject to FMVSS No. 136 would be required to comply with FMCSA's proposed ESC regulation on the final rule's effective date. Vehicles with a GVWR greater than 4,536 kilograms (10,000 pounds) not currently subject to FMVSS No. 136 would be required to meet the proposed ESC regulation on or after the first September 1 that is five years after the date of publication of the final rule.
FMCSA proposes that, for vehicles currently subject to FMVSS No. 136, any vehicle manufactured on or after the first September 1 that is three years after the date of publication of the final rule would be required to meet FMCSA's proposed AEB regulation. FMCSA proposes that vehicles with a gross vehicle weight rating greater than 4,536 kilograms (10,000 pounds) not currently subject to FMVSS No. 136 and vehicles supplied to motor carriers by small-volume manufacturers, final-stage manufacturers, and alterers would be required to meet the proposed AEB regulation on or after the first September 1 that is five years after the date of publication of the final rule.
This proposed implementation timeframe simplifies FMCSR training and enforcement because the Agency expects a large number of final stage manufacturers supplying vehicles to motor carriers in the category of vehicles with a gross vehicle weight rating greater than 4,536 kilograms (10,000 pounds).
FMCSA's phase-in schedule would require the ESC and AEB systems to be inspected and maintained in accordance with §396.3.
Early compliance is permitted but optional.
ADDRESSES:
You may submit comments to the docket number identified in the heading of this document by any of the following methods:
• Federal eRulemaking Portal: Go to https://www.regulations.gov. Follow the online instructions for submitting comments.
• Mail: Docket Management Facility, M–30, U.S. Department of Transportation, West Building, Ground Floor, Rm. W12–140, 1200 New Jersey Avenue SE, Washington, DC 20590.
• Hand Delivery or Courier: West Building, Ground Floor, Room W12–140, 1200 New Jersey Avenue SE, between 9 a.m. and 5 p.m. Eastern Time, Monday through Friday, except Federal holidays. To be sure someone is there to help you, please call 202–366–9332 before coming.
• Fax: 202–493–2251.
Regardless of how you submit your comments, please provide the docket number of this document.
Instructions: For detailed instructions on submitting comments and additional information on the rulemaking process, see the Public Participation heading of the Supplementary Information section of this document. Note that all comments received will be posted without change to https://www.regulations.gov , including any personal information provided.
Privacy Act: In accordance with 5 U.S.C. 553(c), DOT solicits comments from the public to better inform its decision-making process. DOT posts these comments, without edit, including any personal information the commenter provides, to https://www.regulations.gov , as described in the system of records notice (DOT/ALL–14 FDMS), which can be reviewed at https://www.transportation.gov/privacy. In order to facilitate comment tracking and response, the agency encourages commenters to provide their name, or the name of their organization; however, submission of names is completely optional. Whether or not commenters identify themselves, all timely comments will be fully considered.
Docket: For access to the docket to read background documents or comments received, go to https://www.regulations.gov , or the street address listed above. To be sure someone is there to help you, please call 202–366–9322 before coming. Follow the online instructions for accessing the dockets.
FOR FURTHER INFORMATION CONTACT:
NHTSA: For non-legal issues: Hisham Mohamed, Office of Crash Avoidance Standards (telephone: 202–366–0307). For legal issues: David Jasinski, Office of the Chief Counsel (telephone: 202–366–2992, fax: 202–366–3820). The mailing address for these officials is: National Highway Traffic Safety Administration, 1200 New Jersey Avenue SE, Washington, DC 20590. FMCSA: For FMCSA issues: David Sutula, Office of Vehicle and Roadside Operations Division (telephone: 202–366–9209). The mailing address for this official is: Federal Motor Carrier Safety Administration, 1200 New Jersey Avenue SE, Washington, DC 20590.
SUPPLEMENTARY INFORMATION:
Table of Contents
I. Executive Summary
II. Safety Problem
III. Efforts To Promote AEB Deployment in Heavy Vehicles
A. NHTSA's Foundational AEB Research
B. NHTSA's 2015 Grant of a Petition for Rulemaking
C. Congressional Interest
1. MAP–21
2. Bipartisan Infrastructure Law
D. IIHS Effectiveness Study
E. DOT's National Roadway Safety Strategy (January 2022)
F. National Transportation Safety Board Recommendations
G. FMCSA Initiatives
IV. NHTSA and FMCSA Research and Testing
A. NHTSA-Sponsored Research
1. 2012 Study on Effectiveness of FCW and AEB
2. 2016 Field Study
3. 2017 Target Population Study
4. 2018 Cost and Weight Analysis
B. VRTC Research Report Summaries and Test Track Data
1. Relevance of Research Efforts on AEB for Light Vehicles
2. Phase I Testing of Class 8 Truck-Tractors and Motorcoach
3. Phase II Testing of Class 8 Truck-Tractors
4. NHTSA's 2018 Heavy Vehicle AEB Testing
5. NHTSA's Research Test Track Procedures
6. 2021 VRTC Testing
C. NHTSA Field Study of a New Generation Heavy Vehicle AEB System
D. FMCSA-Sponsored Research
V. Need for This Proposed Rule and Guiding Principles
A. Estimating AEB System Effectiveness
B. AEB Performance Over a Range of Speeds Is Necessary and Practicable
C. Market Penetration Varies Significantly Among Classes of Heavy Vehicles
D. This NPRM Would Compel Improvements in AEB
E. BIL Section 23010(b)(2)(B)
F. Vehicles Excluded From Braking Requirements
VI. Heavy Vehicles Not Currently Subject to ESC Requirements
A. AEB and ESC Are Less Available on These Vehicles
B. This NPRM Proposes To Require ESC
C. BIL Section 23010(d)
D. Multi-Stage Vehicle Manufacturers and Alterers
VII. Proposed Performance Requirements
A. Proposed Requirements When Approaching a Lead Vehicle
1. Automatic Emergency Brake Application Requirements
2. Forward Collision Warning Requirement
i. FCW Modalities
ii. FCW Auditory Signal Characteristics
iii. FCW Visual Signal Characteristics
iv. FCW Haptic Signal Discussion
3. Performance Test Requirements
4. Performance Test Scenarios
i. Stopped Lead Vehicle
ii. Slower-Moving Lead Vehicle
iii. Decelerating Lead Vehicle
5. Parameters for Vehicle Tests
i. Vehicle Speed Parameters
ii. Headway
iii. Lead Vehicle Deceleration Parameter
6. Manual Brake Application in the Subject Vehicle
B. Conditions for Vehicle Tests
1. Environmental Conditions
2. Road Service Conditions
3. Subject Vehicle Conditions
C. Proposed Requirements for False Activation
1. No Automatic Braking Requirement
2. Vehicle Test Scenarios
i. Steel Trench Plate
ii. Pass-Through
D. Conditions for False Activation Tests
E. Potential Alternatives to False Activation Tests
F. Proposed Requirements for Malfunction Indication
G. Deactivation Switch
H. System Documentation
I. ESC Performance Test
J. Severability
VIII. Vehicle Test Device
A. Description and Development
B. Specifications
C. Alternatives Considered
IX. Proposed Compliance Date Schedule
X. Retrofitting
XI. Summary of Estimated Effectiveness, Cost, Benefits, and Comparison of Regulatory Alternatives
A. Crash Problem
B. AEB System Effectiveness
C. ESC System Effectiveness
D. Avoided Crashes and Related Benefits
E. Technology Costs
F. Monetized Benefits
G. Alternatives
XII. Regulatory Notices and Analyses
XIII. Public Participation
XIV. Appendices to the Preamble
A. Description of Technologies
B. International Regulatory Requirements and Other Standards
Abbreviations Frequently Used in This Document
The following table is provided for the convenience of readers for illustration purposes only.
| Abbreviation | Full term | Notes |
|---|---|---|
| ABS | Antilock Braking System | Automatically controls the degree of longitudinal wheel slip during braking to prevent wheel lock and minimize skidding by sensing the rate of angular rotation of each wheel and modulating the braking force at the wheels to keep the wheels from slipping. |
| AEB | Automatic Emergency Braking | Applies a vehicle's brakes automatically to avoid or mitigate an impending forward crash. |
| CIB | Crash Imminent Braking | Applies automatic braking when forward-looking sensors indicate a crash is imminent and the driver has not applied the brakes. |
| CMV | Commercial Motor Vehicle | Has the meaning given the term in 49 U.S.C. 31101. |
| CRSS | Crash Report Sampling System | A sample of police-reported crashes involving all types of motor vehicles, pedestrians, and cyclists, ranging from property-damage-only crashes to those that result in fatalities. |
| DBS | Dynamic Brake Support | Supplements the driver's application of the brake pedal with additional braking when sensors determine the driver-applied braking is insufficient to avoid an imminent crash. |
| ESC | Electronic Stability Control | Able to determine intended steering direction (steering wheel angle sensor), compare it to the actual vehicle direction, and then modulate braking forces at each wheel to induce a counter yaw when the vehicle starts to lose lateral stability. |
| FARS | Fatality Analysis Reporting System | A nationwide census providing annual data regarding fatal injuries suffered in motor vehicle crashes. |
| FCW | Forward Collision Warning | An auditory and visual warning provided to the vehicle operator by the AEB system that is designed to induce an immediate forward crash avoidance response by the vehicle operator. |
| FMCSR | Federal Motor Carrier Safety Regulations | 49 CFR parts 350–399. |
| FMVSS | Federal Motor Vehicle Safety Standards | |
| GES | General Estimates System | Data from a nationally representative sample of police reported motor vehicle crashes of all types, from minor to fatal. |
| GVWR | Gross Vehicle Weight Rating | The value specified by the manufacturer as the maximum design loaded weight of a single vehicle. |
| BIL | Bipartisan Infrastructure Law | Public Law 117–58 (Nov. 15, 2021). |
| MAIS | Maximum Abbreviated Injury Scale | A means of describing injury severity based on an ordinal scale. An MAIS 1 injury is a minor injury and an MAIS 5 injury is a critical injury. |
| MAP–21 | The Moving Ahead for Progress in the 21st Century Act | A funding and authorization bill to govern United States Federal surface transportation spending. It was enacted into law on July 6, 2012. |
| NCAP | New Car Assessment Program | |
| PDO | Property-damage-only | A police-reported crash involving a motor vehicle in transport on a trafficway in which no one involved in the crash suffered any injuries. |
| PDOV | Property-Damage-Only-Vehicles | Damaged vehicles involved in property-damage-only crashes. |
| TTC | Time to collision | The theoretical time, given the current speed of the vehicles, after which a rear-end collision with the lead vehicle would occur if no corrective action was taken. |
| VRTC | Vehicle Research and Test Center | NHTSA's in-house laboratory. |
| VTD | Vehicle Test Device | A test device used to test AEB system performance. |
I. Executive Summary
There were 38,824 people killed in motor vehicle crashes on U.S. roadways in 2020 and early estimates put the number of fatalities at 42,915 for 2021. 1 The Department established the National Roadway Safety Strategy in January 2022 to address this rising number of transportation deaths occurring on this country's streets, roads, and highways. 2 This NPRM takes a crucial step in implementing this strategy by proposing to adopt a new Federal motor vehicle safety standard (FMVSS) that would require heavy vehicles to have automatic emergency braking (AEB) systems that mitigate the frequency and severity of rear-end collisions with vehicles.
1 https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813266, https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813283, https://www.nhtsa.gov/press-releases/early-estimate-2021-traffic-fatalities#:~:text=Preliminary%20data%20reported%20by%20the,from%201.34%20fatalities%20in%202020.
2 https://www.transportation.gov/sites/dot.gov/files/2022-01/USDOT_National_Roadway_Safety_Strategy_0.pdf. Last accessed August 23, 2022.
The crash problem addressed by heavy vehicle AEB is substantial, as are the safety benefits to be gained. This NPRM addresses lead vehicle rear-end, rollover, and loss of control crashes, and their associated fatalities, injuries, and property damage. The NPRM also proposes new Federal Motor Carrier Safety Regulations requiring the electronic stability control and AEB systems to be on during vehicle operation. Considering the effectiveness of AEB and electronic stability control technology (ESC) at avoiding these crashes, the proposed rule would conservatively prevent an estimated 19,118 crashes, save 155 lives, and reduce 8,814 non-fatal injuries annually once all vehicles covered in this rule are equipped with AEB and ESC. In addition, it would eliminate 24,828 property-damage-only crashes annually.
In this NPRM, the term “heavy vehicles” refers to vehicles with a gross vehicle weight rating (GVWR) greater than 4,536 kilograms (10,000 pounds). For application of the FMVSS, it is often necessary to further categorize these heavy vehicles, as the FMVSS must be appropriate for the particular type of motor vehicle for which they are prescribed. 3 4 Certain vehicles have common characteristics relevant to the application of AEB, and categorizing those vehicles accordingly allows for useful analyses, proposals, or other considerations that are particularly appropriate for the vehicle group and application of the safety standards.
3 As required by 49 U.S.C 30111(b)(3), NHTSA shall consider whether a proposed standard is reasonable, practicable, and appropriate for the particular type of motor vehicle or motor vehicle equipment for which it is prescribed.
4 This NPRM excludes heavy trailers because they typically do not have braking components necessary for AEB.
One useful way to categorize vehicles further is by GVWR. This NPRM uses vehicle class numbers designed by NHTSA in 49 CFR 565, “Vehicle identification number requirements,” and the Federal Highway Administration that are based on GVWR. 5 These class numbers, shown in Table 2 below, are widely used by industry and States in categorizing vehicles. In this NPRM, “heavy vehicle” and “class 3 through 8” both refer to all vehicles with a GVWR greater than 4,536 kg (10,000 lbs.). The term “class 3 through 6” refers to vehicles with a GVWR greater than 4,536 kg (10,000 lbs.) and up to 11,793 kg (26,000 lbs.), while the term “class 7 to 8” refers to vehicles with a GVWR greater than 11,793 kg (26,000 lbs.).
5 See https://ops.fhwa.dot.gov/publications/fhwahop10014/s5.htm#f21 (Last viewed on May 5, 2022).
| Vehicle class | GVWR |
|---|---|
| 1 | Not greater than 2,722 kg (6,000 lbs.). |
| 2a | Greater than 2,722 kg (6,000 lbs.) and up to 3,856 kg (8,500 lbs.). |
| 2b | Greater than 3,856 kg (8,500 lbs.) and up to 4,536 kg (10,000 lbs.). |
| 3 | Greater than 4,536 kg (10,000 lbs.) and up to 6,350 kg (14,000 lbs.). |
| 4 | Greater than 6,350 kg (14,000 lbs.) and up to 7,257 kg (16,000 lbs.). |
| 5 | Greater than 7,257 kg (16,000 lbs.) and up to 8,845 kg (19,500 lbs.). |
| 6 | Greater than 8,845 kg (19,500 lbs.) and up to 11,793 kg (26,000 lbs.). |
| 7 | Greater than 11,793 kg (26,000 lbs.) and up to 14,969 kg (33,000 lbs.). |
| 8 | Greater than 14,969 kg (33,000 lbs.). |
NHTSA and FMCSA have jointly developed this NPRM. Both agencies will have complementary standards that respond to mandates in Section 23010 of the Bipartisan Infrastructure Law (BIL), as enacted as the Infrastructure Investment and Jobs Act. Section 23010(b) requires the Secretary to prescribe an FMVSS that requires any commercial motor vehicle subject to FMVSS No. 136, “Electronic stability control systems for heavy vehicles,” to be equipped with an AEB system meeting performance requirements established in the new FMVSS not later than two years after enactment. Section 23010(c) requires the Secretary to prescribe a Federal Motor Carrier Safety Regulation (FMCSR) that requires, for commercial motor vehicles subject to FMVSS No. 136, that an AEB system installed pursuant to the new Federal motor vehicle safety standard must be used at any time during which the commercial motor vehicle is in operation. This NPRM sets forth NHTSA's proposed FMVSS and FMCSA's proposed FMCSR issued pursuant to these provisions of the BIL. In order to provide the benefits of AEB to a greater number of vehicles, this proposal would also require that many heavy vehicles not currently subject to FMVSS No. 136, including vehicles in classes 3 through 6, be equipped with ESC and AEB systems under the authority provided in the Motor Vehicle Safety Act. Pursuant to section 23010(d) of the BIL, NHTSA seeks public comment on this proposal.
NHTSA's Statutory Authority
NHTSA is proposing this NPRM under the National Traffic and Motor Vehicle Safety Act (“Motor Vehicle Safety Act”) and in response to the Bipartisan Infrastructure Law. Under 49 U.S.C. Chapter 301, Motor Vehicle Safety (49 U.S.C. 30101 et seq. ), the Secretary of Transportation is responsible for prescribing motor vehicle safety standards that are practicable, meet the need for motor vehicle safety, and are stated in objective terms. “Motor vehicle safety” is defined in the Motor Vehicle Safety Act as “the performance of a motor vehicle or motor vehicle equipment in a way that protects the public against unreasonable risk of accidents occurring because of the design, construction, or performance of a motor vehicle, and against unreasonable risk of death or injury in a crash, and includes nonoperational safety of a motor vehicle.” “Motor vehicle safety standard” means a minimum performance standard for motor vehicles or motor vehicle equipment. When prescribing such standards, the Secretary must consider all relevant, available motor vehicle safety information. The Secretary must also consider whether a proposed standard is reasonable, practicable, and appropriate for the types of motor vehicles or motor vehicle equipment for which it is prescribed and the extent to which the standard will further the statutory purpose of reducing traffic accidents and associated deaths. The responsibility for promulgation of Federal motor vehicle safety standards is delegated to NHTSA.
In developing this NPRM, NHTSA carefully considered these statutory requirements, and relevant Executive Orders, Departmental Orders, and administrative laws and procedures. NHTSA is also issuing this NPRM in response to the Bipartisan Infrastructure Law. Section 23010 of BIL 6 requires the Secretary to prescribe a Federal motor vehicle safety standard to require all commercial motor vehicles subject to a particular brake system standard to be equipped with an AEB system meeting established performance requirements. BIL directs the Secretary to prescribe the standard not later than two years after the date of enactment of the Act.
6 Public Law 117–58, (Nov. 15, 2021).
FMCSA's Statutory Authority
For purposes of this NPRM, FMCSA's authority is found in the Motor Carrier Act of 1935 (1935 Act, 49 U.S.C. 31502) and the Motor Carrier Safety Act of 1984 (1984 Act, 49 U.S.C. 31132 et seq. ), both as amended. The authorities assigned to the Secretary in these two acts are delegated to the FMCSA Administrator in 49 CFR 1.87(i) and (f), respectively. In addition, section 23010(c) of the BIL, Public Law 117–58, 135 Stat. 429, 766–767, Nov. 15, 2021, requires FMCSA to adopt an AEB regulation consistent with the companion NHTSA AEB regulation.
The 1935 Act authorizes the DOT to “prescribe requirements for—(1) qualifications and maximum hours of service of employees of and safety of operation and equipment of a motor carrier; and (2) qualifications and maximum hours of service of employees of, and standards of equipment of, a motor private carrier, when needed to promote safety of operations” (49 U.S.C. 31502(b)). FMCSA's proposed ESC and AEB regulations, which incorporate the ESC and AEB requirements of the NHTSA rule, will require most motor carriers to maintain and use the ESC and AEB systems required by the corresponding NHTSA regulations to promote safety of operations.
The 1984 Act confers on DOT the authority to regulate drivers, motor carriers, and vehicle equipment. “At a minimum, the regulations shall ensure that—(1) commercial motor vehicles are maintained, equipped, loaded, and operated safely; (2) the responsibilities imposed on operators of commercial motor vehicles do not impair their ability to operate the vehicles safely; (3) the physical condition of operators of commercial motor vehicles is adequate to enable them to operate the vehicles safely; (4) the operation of commercial motor vehicles does not have a deleterious effect on the physical condition of the operators; and (5) an operator of a commercial motor vehicle is not coerced by a motor carrier, shipper, receiver, or transportation intermediary to operate a commercial motor vehicle in violation of a regulation promulgated under this section, or chapter 51 or chapter 313 of this title” (49 U.S.C. 31136(a)(1)–(5)).
FMCSA's proposed rule will help to ensure that commercial motor vehicles (CMVs) equipped with the ESC and AEB systems mandated by NHTSA are maintained and operated safely, as required by 49 U.S.C. 31136(a)(1). While the FMCSA proposal does not explicitly address the remaining provisions of section 31136, it will enhance the ability of drivers to operate safely, consistent with 49 U.S.C. 31136(a)(2)–(4).
Section 23010(c) of BIL requires FMCSA to prescribe a regulation under 49 U.S.C. 31136 that requires that an automatic emergency braking system installed in a commercial motor vehicle manufactured after the effective date of the NHTSA standard that is in operation on or after that date and is subject to 49 CFR 571.136 be used at any time during which the commercial motor vehicle is in operation” (135 Stat. 767). Consistent with the BIL mandate, part of FMCSA's proposal would require that motor carriers operating CMVs manufactured subject to FMVSS No. 136 maintain and use the required AEB devices as prescribed by NHTSA whenever the CMV is operating.
AEB and ESC Systems
An AEB system employs multiple sensor technologies and sub-systems that work together to sense when a vehicle is in a crash imminent situation with a lead vehicle and, when necessary, automatically apply the vehicle brakes if the driver has not done so, or apply the brakes to supplement the driver's applied braking. Current systems use radar and camera-based sensors or combinations thereof. AEB builds upon older forward collision warning-only systems. An FCW-only system provides an alert to a driver of an impending rear-end collision with a lead vehicle to induce the driver to take action to avoid the crash but does not automatically apply the brakes. This proposal would require both FCW and AEB systems. For simplicity, when referring to AEB systems in general, this proposal is referring to both FCW and AEB unless the context suggests otherwise.
This proposal follows up on NHTSA's October 16, 2015 notice granting a petition for rulemaking submitted by the Truck Safety Coalition, the Center for Auto Safety, Advocates for Highway and Auto Safety, and Road Safe America. 7 The petitioners requested that NHTSA establish a safety standard to require automatic forward collision avoidance and mitigation systems on heavy vehicles. This rulemaking also addresses recommendations made to NHTSA by the National Transportation Safety Board.
7 80 FR 62487.
The safety problem addressed by AEB is substantial. An annualized average of 2017 to 2019 data from NHTSA's Fatality Analysis Reporting System (FARS) and the Crash Report Sampling System (CRSS) shows that heavy vehicles are involved in around 60,000 rear-end crashes in which the heavy vehicle was the striking vehicle annually, which represents 11 percent of all crashes involving heavy vehicles. 8 These rear-end crashes resulted in 388 fatalities annually, which comprises 7.4 percent of all fatalities in heavy vehicle crashes. These crashes resulted in approximately 30,000 injuries annually, or 14.4 percent of all injuries in heavy vehicle crashes, and 84,000 damaged vehicles with no injuries or fatalities.
8 These rear-end crashes are cases where the heavy vehicle was the striking vehicle.
Considering vehicle size, approximately half of the rear-end crashes, injuries, and fatalities resulting from rear-end crashes where the heavy vehicle was the striking vehicle involved vehicles with a gross vehicle weight rating above 4,536 kilograms (10,000 pounds) up to 11,793 kilograms (26,000 pounds). Similarly, half of all rear-end crashes and the fatalities and injuries resulting from those crashes where the heavy vehicle was the striking vehicle involved vehicles with a gross vehicle weight rating of greater than 11.793 kilograms (26,000 pounds).
The speed of the striking vehicle is an important factor in the severity of a crash. For example, in approximately 53 percent of crashes, the striking vehicle was traveling at or under 30 mph (47 km/h). Those crashes, though, were responsible for only approximately 1 percent of fatalities. In contrast, in approximately 17 percent of crashes, the striking vehicle was traveling over 55 mph (89 km/h). Those crashes resulted in 89 percent of the fatalities from rear-end crashes involving heavy vehicles. While the majority of crashes occur at low speeds, the overwhelming majority of fatalities result from high-speed crashes. For AEB systems to address this safety problem, they must function at both low and high speeds.
NHTSA has been studying AEB technologies since their conception over 15 years ago. NHTSA and FMCSA have recognized the potential of heavy vehicle AEB for many years and continued to research this technology as it evolved from early generations to its current state. As part of NHTSA's efforts to better understand these new collision prevention technologies, NHTSA sponsored and conducted numerous research projects, including ones focused on AEB and FCW for heavy trucks. NHTSA conducted testing at its in-house testing facility, the Vehicle Research and Test Center, to examine the effectiveness of AEB in different crash scenarios and speeds. NHTSA and FMCSA have also sponsored or conducted projects with a specific focus on the heavy vehicle rear-end crash problem.
International standards for the regulation of AEB systems on heavy vehicles exist and are under development. The European Union and Asian countries have either already adopted or are considering AEB regulations for heavy vehicles. More information can be found in Appendix A of this document.
In 2016, NHTSA published its first report of track testing of heavy vehicles equipped with AEB systems. NHTSA used its light vehicle test procedures, similar to those used in NHTSA's New Car Assessment Program, 9 as a framework to adapt for use on heavy vehicles. These scenarios included a stopped lead vehicle scenario, a slower moving lead vehicle scenario, a decelerating lead vehicle scenario, and a false positive scenario that consisted of driving over a steel trench plate. NHTSA's initial testing of AEB systems focused on vehicles equipped with ESC—primarily Class 8 truck tractors and motorcoaches. Adjustments had to be made to the scenarios to account for the greater stopping distances of heavy vehicles compared to light vehicles and to the surrogate vehicle and towing device to ensure that the systems performed as they would on the road. Testing of early heavy vehicle systems indicated that vehicles did not automatically brake when encountering a stopped lead vehicle. The false positive test also resulted in FCW alerts, but no automatic braking.
9 NHTSA's New Car Assessment Program (NCAP) provides comparative information on the safety performance of new vehicles to assist consumers with vehicle purchasing decisions and to encourage safety improvements.
Later testing was intended to evaluate the evolution of AEB systems, to further refine the test procedures, and to test other vehicle types such as single-unit trucks and class 3 through 6 vehicles. Newer FCW and AEB systems on heavy vehicles generally performed better than older versions. Testing of these updated systems exhibited less severe rear-end collisions through velocity reductions before a collision or avoided contact with a lead vehicle entirely. The refined test procedures addressed previous issues with timing, range parameters, and the vehicle test device.
NHTSA's most recent testing of a 2021 Freightliner Cascadia, a class 8 truck tractor, indicated that the AEB system was able to prevent a collision with a lead vehicle at speeds between 40 km/h and 85 km/h. Collisions occurred with the lead vehicle at lower speeds, although significant speed reductions were still achieved. This suggests that collision avoidance at lower speed cannot necessarily be extrapolated to performance outcomes at higher speed and may depend on the specific ways AEB systems may be programmed. It also indicates that AEB systems that prevent collisions at higher speeds are practicable.
NHTSA and FMCSA studies have also examined system availability across all types of heavy vehicles. Across larger (class 7 and 8) air braked truck tractors and motorcoaches, AEB systems are widely available. A market analysis of class 3 through 6 heavy vehicles showed that nearly all manufacturers had at least one vehicle model within each class available with AEB. Two manufacturers had AEB advertised as standard equipment on at least one model. All vehicles that were offered with AEB systems were also equipped with ESC systems. A few models that offered FCW-only systems (not capable of automatic brake application) did so without also having ESC.
Based on these factors, and consistent with the Motor Vehicle Safety Act and the BIL, NHTSA is proposing a new FMVSS that would require nearly all heavy vehicles to be equipped with AEB systems. 10 Furthermore, FMCSA is proposing that all commercial vehicles equipped with ESC and AEB systems required by NHTSA's proposed rule be used any time the commercial vehicle is in operation. NHTSA is further proposing minimum performance criteria for AEB systems to meet the need for safety. These performance criteria would ensure that AEB systems function at a wide range of speeds that address the safety problem associated with rear-end crashes, injuries, and fatalities.
10 The vehicles excluded from this proposal include trailers, which by definition, are towed by other vehicles, and vehicles already excluded from NHTSA's braking requirements. For details, see section V.F.
Based on NHTSA's survey of publicly available data on ESC and AEB system availability, all manufacturers that have equipped vehicles with AEB systems (other than FCW-only systems) have done so only if the vehicle is also equipped with an ESC system. Furthermore, NHTSA has consulted with two AEB system manufacturers for heavy vehicles and both indicated that they would equip vehicles with AEB only if they were also equipped with ESC. 11 An ESC system provides stability under braking by using differential braking and engine torque reduction to reduce lateral instability that could induce rollover or loss of directional control. An ABS system also provides lateral stability under braking. ABS systems are currently required on all vehicles subject to this proposal under FMVSS Nos. 105 and 121. However, the absence of any AEB systems available without ESC leads NHTSA to believe that manufacturers have identified scenarios in which the operation of an AEB system without ESC may have adverse safety effects that are not adequately addressed by ABS systems alone.
11 On September 29, 2021, NHTSA met with Daimler Truck North America (DTNA) and on October 22, 2021, NHTSA met with Bendix to discuss the AEB systems of heavy vehicles.
Summary of the Proposal
NHTSA has tentatively concluded based upon this information that a safety need exists for an ESC system to be installed on a vehicle equipped with AEB. Consequently, this proposal also requires nearly all heavy vehicles to be equipped with an ESC system. 12 Even separate from the benefits of AEB, the safety problem related to the vehicles addressed by the FMVSS No. 136 amendments is also substantial. Class 3 through 6 heavy vehicles are involved in approximately 17,000 rollover and loss of control crashes annually. These crashes resulted in 178 fatalities annually, approximately 4,000 non-fatal injuries, and 13,000 damaged vehicles. Currently, pursuant to FMVSS No. 136, only class 7 and 8 truck tractors and certain large buses are required to have ESC systems. FMVSS No. 136 includes both vehicle equipment requirements and performance requirements. This proposal would amend FMVSS No. 136 to require nearly all heavy vehicles to have an ESC system that meets the equipment requirements, the general system operational capability requirements, and malfunction detection requirements of FMVSS No. 136. It would not, as proposed, require vehicles not currently required to have ESC systems to meet any test track performance requirements for ESC systems, though the agency does request comment on whether to include a performance test and, if so, what that test should be. In designing any potential test, NHTSA wishes to remain conscious of the potential testing burden on small businesses and the multi-stage vehicle manufacturers.
12 The vehicles excluded from the proposed ESC requirements are the same vehicles excluded from the proposed AEB requirements.
The proposed standard includes certain requirements for AEB systems. First, vehicles would be required to provide the driver with a forward collision warning at any forward speed greater than 10 km/h (6.2 mph). NHTSA is proposing that the forward collision warning be auditory and visual with limited specifications for each of the warning modalities. NHTSA has tentatively concluded that no further specification of the warning is necessary.
Second, vehicles would be required to have an AEB system that applies the service brakes automatically at any forward speed greater than 10 km/h (6.2 mph) when a collision with a lead vehicle is imminent. This requirement serves to ensure that AEB systems operate at all speeds above 10 km/h, even if they are above the speeds tested by NHTSA. This requirement also assures at least some level of AEB system performance in rear-end crashes other than those for which NHTSA has test procedures.
Third, the AEB system would be required to prevent the vehicle from colliding with a lead vehicle when tested according to the proposed standard's test procedures. Vehicles with AEB systems meeting the proposed standard would have to automatically activate the braking system when they encounter a stopped lead vehicle, a slower moving lead vehicle, or a decelerating lead vehicle.
The proposed requirements also include two tests to ensure that the AEB system does not inappropriately activate when no collision is actually imminent. These false positive tests provide some assurance that an AEB system is capable of differentiating between an actual imminent collision and a non-threat. While these tests are not comprehensive, they establish a minimum performance for non-activation of AEB systems. The two scenarios NHTSA proposes to test are driving over a steel trench plate and driving between two parked vehicles.
The final proposed requirement for AEB systems is that they be capable of detecting a system malfunction and notify the driver of any malfunction that causes the AEB system not to operate. This proposed requirement would include any malfunction solely attributable to sensor obstruction, such as by accumulated snow or debris, dense fog, or sunlight glare. The malfunction telltale must remain active as long as the malfunction exists, and the vehicle's starting system is on. The proposal does not include any specifications for the form of this notification to the driver.
The NPRM also includes proposed test procedures. In this NPRM, the heavy vehicle being evaluated with AEB is referred to as the “subject vehicle.” Other vehicles involved in the test are referred to as “vehicle test devices,” (VTDs) and a specific type of VTD called the “lead vehicle” refers to a vehicle which is ahead in the same lane, in the path of the moving subject vehicle. To ensure repeatable test conduct that reflects how a subject vehicle might respond in the real world, this proposal includes broad specifications for a vehicle test device to be used as a lead vehicle or principal other vehicle during testing. NHTSA is proposing that the vehicle test device is based on the specifications in the International Organization for Standardization (ISO) standard 19206–3:2021. 13 The vehicle test device is a tool that NHTSA would use in the agency's compliance tests to measure the performance of automatic emergency braking systems required by the FMVSS. For its research testing, NHTSA has been using a full-size surrogate vehicle, the Global Vehicle Target (GVT). The GVT falls within the specifications of ISO 19206–3:2021. These specifications include specifications for the dimensions, color and reflectivity, and the radar cross section of a vehicle test device that ensure it appears like a real vehicle to vehicle sensors.
13 ISO 19206–3:2021, “Road vehicles—Test devices for target vehicles, vulnerable road users and other objects, for assessment of active safety functions—Part 3: Requirements for passenger vehicle 3D targets.” https://www.iso.org/standard/70133.html. May 2021.
NHTSA has included three test scenarios in this proposed rule for AEB when approaching a lead vehicle—a stopped lead vehicle, a slower moving lead vehicle, and a decelerating lead vehicle. The stopped lead vehicle scenario consists of the subject vehicle—that is, the vehicle being tested—traveling straight at a constant speed approaching a stopped lead vehicle in the center of its path. To satisfy the proposed performance requirement, the subject vehicle must provide an FCW and stop prior to colliding with the lead vehicle. NHTSA proposes to conduct this scenario both with no manual brake application and with manual brake application. Testing with manual brake application is similar to the DBS test procedure that is included in New Car Assessment Program for light vehicles. While DBS is not generally advertised as a feature of AEB systems on air braked vehicles, driver-applied braking should not suppress automatic braking. Testing without manual brake application would be conducted at any constant speed between 10 km/h and 80 km/h. The 80 km/h upper bound of testing reflects safety limitations that would result from any collision resulting from a failure of an AEB system to activate in the testing environment. However, with manual brake application, NHTSA proposes to test vehicles up to 100 km/h. This is possible because the manual brake application ensures at least some level of speed reduction even in a test failure where automatic braking does not occur.
The second test scenario is a slower moving lead vehicle. In this scenario, the subject vehicle is traveling straight at a constant speed, approaching a lead vehicle traveling at a slower speed in the subject vehicle's path. To satisfy the proposed performance test requirement, the subject vehicle must provide an FCW and slow to a speed equal to or below the lead vehicle's speed without colliding with the lead vehicle. As with the stopped lead vehicle test, NHTSA proposes to perform this test with both no manual brake application and manual brake application. The subject vehicle speed without manual brake application would be any constant speed between 40 km/h and 80 km/h, and with manual brake application, testing would be conducted at any constant speed between 70 km/h and 100 km/h. The lead vehicle would travel at 20 km/h in all tests.
The third test scenario is a decelerating lead vehicle. In this scenario, the subject vehicle and lead vehicle are travelling at the same constant speed in the same path and the lead vehicle begins to decelerate. To satisfy the proposed performance test requirement, the subject vehicle must provide an FCW and stop without colliding with the lead vehicle. As with the other AEB tests approaching a lead vehicle, this test is performed both with and without manual brake application. However, the test speeds are the same for both scenarios—either 50 km/h or 80 km/h. The lead vehicle would decelerate with a magnitude between 0.3g and 0.4g and the headway between the vehicles would be any distance between 21 m and 40 m (for 50 km/h tests) or 28 m and 40 m (for 80 km/h tests). The upper bound of the lead vehicle deceleration and the lower bound of the headway were chosen to ensure that the corresponding test scenarios would not require a brake performance beyond what is necessary to satisfy the minimum stopping distance requirements in the FMVSS applicable to brake performance.
This proposal would require that all of the NHTSA AEB requirements be phased in within four years of publication of a final rule. Truck tractors and certain large buses with a GVWR of greater than 11,793 kilograms (26,000 pounds) that are currently subject to FMVSS No. 136 would be required to meet all requirements within three years. Vehicles not currently subject to FMVSS No. 136 would be required to have ESC and AEB systems within four years of publication of a final rule. Small-volume manufacturers, final-stage manufacturers, and alterers would be allowed one additional year (five years total) of lead time.
Consistent with the BIL mandate, FMCSA proposes to require that motor carriers operating CMVs manufactured subject to FMVSS No. 136, maintain and use the required AEB and ESC systems as prescribed by NHTSA for the effective life of the CMV. FMCSA's proposed rule is intended to ensure that commercial motor vehicles equipped with the ESC and AEB systems mandated by NHTSA are maintained and operated safely, as required by 49 U.S.C. 31136(a)(1). While the FMCSA proposal does not explicitly address the remaining provisions of section 31136, it will enhance the ability of drivers to operate safely, consistent with 49 U.S.C. 31136(a)(2)–(4). FMCSA's proposal would require the ESC and AEB systems to be inspected and maintained in accordance with 49 CFR part 396, Inspection, Repair, and Maintenance (§396.3).
The proposed requirements would ensure that the benefits resulting from CMVs equipped with ESC and AEB systems are sustained through proper maintenance and operation. The maintenance costs include annual costs required to keep the ESC and AEB systems operative. FMCSA believes the cost of maintaining the ESC and AEB systems over their lifetimes is minimal compared to the cost of equipping trucks with ESC and AEB systems and may be covered by regular annual maintenance.
NHTSA and FMCSA have jointly determined not to propose retrofitting requirements AEB for existing heavy vehicles and ESC for vehicles not currently subject to FMVSS No. 136. For technical reasons, AEB and ESC retrofits are difficult to apply broadly, generically, or inexpensively and thus this NPRM does not propose a retrofit requirement.
NHTSA and FMCSA seek comments and suggestions on any aspect of this proposal and any alternative requirements to address this safety problem. NHTSA and FMCSA also request comments on the proposed lead time for meeting these requirements, and how the lead time can be structured to maximize the benefits that can be realized most quickly while ensuring that the standard is practicable. Finally, NHTSA and FMCSA seek comment on whether and how this proposal may disproportionately impact small businesses and how NHTSA and FMCSA could revise this proposal to minimize any disproportionate impact.
Benefits and Costs
NHTSA and FMCSA have issued a Preliminary Regulatory Impact Analysis (PRIA) that analyzes the potential impacts of this proposed rule. The PRIA is available in the docket for this NPRM. 14 This proposed rule is expected to substantially decrease risks associated with rear-end, rollover, and loss of control crashes. The effectiveness of AEB and ESC at avoiding rear-end, rollover, and loss of control crashes is summarized in Table 3 for AEB and Table 4 for ESC.
14 The PRIA may be obtained by downloading it or by contacting Docket Management at the address or telephone number provided at the beginning of this document.
| Vehicle class range | Stopped lead vehicle | Slower-moving lead vehicle | Decelerating lead vehicle |
|---|---|---|---|
| 7–8 | 38.5 | 49.2 | 49.2 |
| 3–6 | 43.0 | 47.8 | 47.8 |
| Vehicle class range | Rollover | Loss of control |
|---|---|---|
| 3–6 | 48.0 | 14.0 |
Considering the annual rear-end, rollover, and loss of control crashes, as well as the effectiveness of AEB and ESC at avoiding these crashes, the proposed rule would prevent an estimated 19,118 crashes, save 155 lives, and reduce 8,814 non-fatal injuries, annually. In addition, the proposed rule would eliminate an estimated 24,828 property-damage-only-vehicles (PDOVs), annually. Table 5 shows these estimated benefits also by vehicle class and technology.
| Crashes avoided | Fatalities avoided | Non-fatal injuries avoided | PDOVs avoided | |
|---|---|---|---|---|
| By Vehicle Class | ||||
| Class 7–8 | 5,691 | 40 | 2,822 | 7,958 |
| Class 3–6 | 13,427 | 115 | 5,992 | 16,870 |
| Total | 19,118 | 155 | 8,814 | 24,828 |
| By Technology | ||||
| AEB | 16,224 | 106 | 8,058 | 22,713 |
| ESC | 2,894 | 49 | 756 | 2,115 |
| Total | 19,118 | 155 | 8,814 | 24,828 |
There are two potential unintended consequences that cannot be quantified: the impact of false activations on safety and the potential impact of sensor degradation over time on AEB performance. However, the required malfunction indicator combined with FMCSA's proposed AEB and ESC inspection and maintenance requirements would help vehicle operators maintain AEB systems and substantially reduce degradation of AEB sensor performance. We seek comments on these two issues and ask for any data that can help us to quantify these impacts.
The benefits estimate includes assumptions that likely result in the underestimation of the benefits of this proposal because it does not quantify the benefits from crash mitigation. That is, the benefits only reflect those resulting from crashes that are avoided as a result of AEB and ESC. It is likely that AEB will also reduce the severity of crashes that are not prevented. Some of these crashes mitigated may include fatalities and significant injuries that will be prevented or mitigated by AEB. Finally, this NPRM does not quantify any potential benefits that AEB could provide during adverse environmental conditions (night, wet, etc.). While AEB is likely to be effective in many of these crashes, NHTSA is not aware of any data to quantify the performance degradation of AEB in adverse conditions.
The benefits of this proposed rule, monetized and analyzed with the total annual cost, are summarized in Table 6. The total annual cost, considering the implementation of both AEB and ESC technologies proposed in this rule, is estimated to be $353 million. The proposed rule would generate a net benefit of $2.58 to $1.81 billion, annually under 3 and 7 percent discount rates. The proposed rule would be cost-effective given that the highest estimated net cost per fatal equivalent would be $0.50 million. Maintenance costs are considered de minimis and therefore not included in the cost estimate.
| Discount rates | Annual cost * | Monetized benefits | Net cost per fatal equivalent | Net benefits |
|---|---|---|---|---|
| * Paid at purchasing; no need to discount. | ||||
| 3 Percent | $353.3 | $2,937.0 | 15 −$0.12 | $2,583.7 |
| 7 Percent | 353.3 | 2,158.0 | 0.50 | 1,807.1 |
NHTSA has issued an NPRM that proposes to adopt an FMVSS for AEB requirements for light vehicles, including pedestrian AEB. 16 NHTSA notes that it may decide to issue final rules adopting the AEB requirements for light and heavy vehicles in a way that incorporates the AEB requirements into a single Federal motor vehicle safety standard for all vehicle classes.
15 The negative net cost per fatal equivalent reflects the fact that savings from reducing traffic congestion and damaged property is greater the total compliance costs of the proposed rule.
16 88 FR 38632 (June 13, 2023).
The following is a brief explanation of terms and technologies used to describe AEB systems. More detailed information can be found in Appendix A to this preamble.
Radar-Based Sensors
Heavy vehicle AEB systems typically employ radar sensors. At its simplest, radar is a time-of-flight sensor that measures the time between when a radio wave is transmitted and its reflection is recorded. This time-of-flight is then used to calculate how far away the object is that caused the reflection. Information about the reflecting object, such as the speed at which it is travelling, can also be determined. Radar units are compact, relatively easy to mount, and do not require a line of sight to function properly. Radar can penetrate most rubbers and plastics, allowing for the units to be installed behind grilles and bumper fascia, increasing mounting options. Radar can detect objects in low-light situations and also works well in environmental conditions like precipitation and fog.
Camera Sensors
Cameras are passive sensors in which optical data are recorded then processed to allow for object detection and classification. Cameras are an important part of many automotive AEB systems, and one or more cameras are typically mounted behind the front windshield and often up high near the rearview mirror. Cameras at this location provide a good view of the road and are protected by the windshield from debris, grease, dirt, and other contaminants that can cover the sensor. Systems that utilize two or more cameras can see stereoscopically, allowing the processing system to determine range information along with detection and classification.
Electronically Modulated Braking Systems
Automatic actuation of the vehicle brakes requires more than just systems to sense when a collision is imminent. In addition to the sensing system, hardware is needed to physically apply the brakes without relying on the driver to apply the brake pedal. AEB leverages two foundational braking technologies, antilock braking systems (ABS) and electronic stability control. AEB uses the hardware equipped for ESC and electronically applies the brakes to avoid certain scenarios where a crash with a vehicle is imminent.
ABS: Antilock braking systems automatically control the degree of longitudinal wheel slip during braking to prevent wheel lock and minimize skidding by sensing the rate of angular rotation of the wheels and modulating the braking force at the wheels to keep the wheels from locking. Preventing wheel lock, and therefore skidding, greatly increases the controllability of the vehicle during a panic stop. Modern ABS systems have wheel speed sensors, independent brake modulation at each wheel, and can increase or decrease braking pressures as needed. During modulation of a brake application, the ABS system repeatedly relieves and regenerates pressure to quickly release and reapply, or “pulse,” the brake.
ESC: ESC builds upon the antilock brakes system by adding two sensors, a steering wheel angle sensor and an inertial measurement unit. These sensors allow the ESC controller to determine intended steering direction (steering wheel angle sensor), compare it to the actual vehicle direction, and then modulate braking forces at each wheel to induce a corrective yaw moment when the vehicle starts to lose lateral stability. An ESC system can control the brakes even when the vehicle operator is not pressing the brake pedal.
When an AEB system activates in response to an imminent collision, much of the same or similar hardware from ESC systems is used to automatically control and modulate the brakes. Like ESC, an AEB system includes components that give the vehicle the capacity to automatically apply the brakes even when the vehicle operator is not pressing the brake pedal. To do this in hydraulic brake systems, hydraulic brake pressure is generated by a pump similarly as with ABS. In a pneumatic brake system, the air pressure is already available via the air reservoir and air compressor, and the ESC system must direct this pressure accordingly. Additionally, the safety benefits of ESC enable an AEB system to operate at its potential. Especially under the high-speed, heavy-deceleration emergency braking events that potentially occur during AEB activation, ESC could improve vehicle stability and reduce the propensity for loss of control or rollover crashes that may result from a steering response to an impending rear-end collision.
Forward Collision Warning
A forward collision warning (FCW) system uses the camera and radar sensors described above, and couples them with an alert mechanism. An FCW system can monitor a vehicle's speed, the speed of the vehicle in front of it, and the distance between the two vehicles. If the FCW system determines that the distance from the driver's vehicle to the vehicle in front of it is too short, and the closing velocity between the two vehicles too high, the system warns the driver of an impending rear-end collision. Warning systems in use today provide drivers with a visual display, such as a light on the instrument panel, an auditory signal ( e.g., beeping tone or chime), and/or a haptic signal that provides tactile feedback to the driver ( e.g., rapid vibrations of the seat pan or steering wheel or a momentary brake pulse) to alert the driver of an impending crash so they may manually intervene. The alerts provided by FCW systems, even those that include momentary brake pulses, are not intended to provide significant and sustained vehicle deceleration. Rather, the FCW system is intended to inform the driver that they must take corrective action in certain rear-end crash-imminent driving situations.
Automatic Emergency Braking
An automatic emergency braking system automatically applies the brakes to help drivers avoid or mitigate the severity of rear-end crashes. AEB has two primary functions, crash imminent braking (CIB) and a brake support system that supplements a driver's applied braking, which is referred to as dynamic brake support (DBS) in the light vehicle context. CIB systems apply automatic braking when forward-looking sensors indicate a crash is imminent and the driver has not applied the brakes, while supplemental brake support systems use the same forward-looking sensors, but also supplement the driver's application of the brake pedal with enhanced braking when sensors determine the driver-applied braking is insufficient to avoid the imminent crash. This NPRM does not split the terminology of these CIB and supplemental brake support functionalities, and instead considers both functions as part of AEB. The proposed standard includes performance tests that would entail installation of AEB that has both CIB and supplemental brake support functionalities.
“AEB” as Used in This NPRM
As used in this NPRM, when we refer to “AEB,” we mean a system that has: (a) a forward collision warning (FCW) component to alert the driver to an impending collision; (b) a crash imminent braking component (CIB) that automatically applies the vehicle's brakes if the driver does not respond to an imminent crash in the forward direction regardless of whether there's an FCW alert; and, (c) a supplemental brake support component that automatically supplements the driver's brake application if the driver applies insufficient manual braking.
II. Safety Problem
Overview
There were 38,824 people killed in motor vehicle crashes on U.S. roadways in 2020 and 42,939 in 2021. 17 18 The 2021 data are the highest numbers of fatalities since 2005. While the upward trend in fatalities may be related to increases in risky driving behaviors during the COVID–19 pandemic, 19 NHTSA data from 2010 to 2019 show an increase of approximately 3,000 fatalities since 2010. There has also been an upward trend since 2010 in the total number of motor vehicle crashes, which corresponds to an increase in fatalities, injuries, and property damage. NHTSA uses data from its FARS and the CRSS, to account for and understand motor vehicle crashes. 20
17 https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813266; , https://www.nhtsa.gov/press-releases/early-estimate-2021-traffic-fatalities#:~:text=Preliminary%20data%20reported%20by%20the,from%201.34%20fatalities%20in%202020.
18 https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813435; https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813283; https://www.nhtsa.gov/press-releases/early-estimate-2021-traffic-fatalities#:~:text=Preliminary%20data%20reported%20by%20the,from%201.34%20fatalities%20in%202020.
19 These behaviors relate to increases in impaired driving, the non-use of seat belts, and speeding.
20 The Crash Report Sampling System (CRSS) builds on a previous, long-running National Automotive Sampling System General Estimates System (NASS GES). CRSS is a sample of police-reported crashes involving all types of motor vehicles, pedestrians, and cyclists, ranging from property-damage-only crashes to those that result in fatalities. CRSS is used to estimate the overall crash picture, identify highway safety problem areas, measure trends, drive consumer information initiatives, and form the basis for cost and benefit analyses of highway safety initiatives and regulations. FARS contains data on every fatal motor vehicle traffic crash within the 50 States, the District of Columbia, and Puerto Rico. To be included in FARS, a traffic crash must involve a motor vehicle traveling on a public trafficway that results in the death of a vehicle occupant or a nonoccupant within 30 days of the crash.
Rear-End Crashes
As defined in a NHTSA technical manual relating to data entry for FARS and CRSS, rear-end crashes are incidents where the first event is defined as the frontal area of one vehicle striking a vehicle ahead in the same travel lane. In a rear-end crash, as instructed by the FARS/CRSS Coding and Validation Manual, the vehicle ahead is categorized as intending to head either straight, left or right, and is either stopped, travelling at a lower speed, or decelerating. 21
21 https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813251 Category II Configuration D. Rear-End.
Heavy Vehicle Rear-End Crashes
On average from 2017 to 2019, there were 6.65 million annual police-reported crashes resulting in 36,888 fatalities. Of the police-reported crashes, approximately 550,000 involved a heavy vehicle (a vehicle with a GVWR greater than 4,536 kg (10,000 pounds)), resulting in 5,255 fatalities. 22 Thus, heavy vehicle crashes represented 8.3 percent of the total number of crashes and resulted in 14.2 percent of all fatalities. Annually, the entire U.S. fleet traveled a total of 3,237,449 million miles, and 9.3 percent of total vehicle miles traveled were in heavy vehicles. 23
22 Data are from 2017–2019 FARS and CRSS crash databases, as discussed in the accompanying PRIA.
23 See the Traffic Safety Report at https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813141 (Last viewed September 22, 2022).
A typical heavy vehicle rear-end crash is characterized by a heavy vehicle travelling on a roadway and colliding with another vehicle ahead of it travelling in the same direction, but which is stopped, moving slower, or decelerating, usually within the same lane. While these crashes occur nationwide on all types of roads and in all environments, they overwhelmingly take place on straight roadways (99 percent) and in dry conditions (85 percent). Approximately 60,000 (11 percent of heavy vehicle crashes annually), were rear-end crashes in which the heavy vehicle was the striking vehicle. These rear-end crashes resulted in 388 fatalities annually (7.4 percent of all fatalities in heavy vehicle crashes), approximately 30,000 injuries (14.3 percent of injuries in all heavy vehicle crashes.), and approximately 84,000 damaged vehicles (without injuries or fatalities). 24
24 All data in this paragraph are from 2017–2019 FARS and CRSS crash databases, and are discussed in the accompanying PRIA.
The PRIA accompanying this proposal includes a complete review and analysis of the relevant crash data and provides full details about the target population of this NPRM. A summary of the PRIA is contained in section XI. of this proposal.
Rear-End Crashes by Heavy Vehicle Class
Installing AEB on vehicles is related to the installation of ESC on vehicles. ESC is required by FMVSS No. 136 for truck tractors and certain large buses with a GVWR greater than 11,793 kg (26,000 lbs.). Although the group of heavy vehicles that is not subject to FMVSS No. 136 and the group of heavy vehicles that is subject to FMVSS No. 136 are not solely defined by GVWR range, those not subject to FMVSS No. 136 can be generally characterized as class 3–6 vehicles, while those that are subject to FMVSS No. 136 can be generally characterized as class 7–8 vehicles. Accordingly, NHTSA has further examined rear-end crash data for each of these vehicle class ranges.
The lower weight range of class 3 through 6 includes vehicles such as delivery vans, utility trucks, and smaller buses. Sales data for 2018 and 2019 show that on average 454,692 class 3–6 vehicles per year were sold in the U.S. 25 Approximately 57 percent of these were class 3 vehicles. Based on crash data, NHTSA determined that class 3–6 vehicles are involved in an annual average of 29,493 rear-end crashes where the heavy vehicle is the striking vehicle. As a result of these crashes, there were 184 fatalities, 14,675 injuries, and 41,285 PDOVs per year on average. A NHTSA study also shows that, according to FARS data, fatalities related to crashes involving these vehicles are on the rise. 26 In 2015, trucks and buses in this category were involved in 2 percent of all fatal crashes in the U.S., but that increased to 4 percent in 2019. 27
25 This information is available in the S&P Global's presentation titled “MHCV Safety Technology Study,” which has been placed in the docket identified in the heading of this NPRM.
26 Mynatt, M., Zhang, F., Brophy, J., Subramanian, R., Morgan, T. (2022, September). Medium Truck Special Study (Report No. DOT HS 813 371). Washington, DC: National Highway Traffic Safety Administration.
27 In 2015, 655 of the 32,538 total fatalities involved a class 3–6 truck. In 2019, it increased to 1,301 of the 33,244 total fatalities.
The higher weight range of class 7 and 8 includes vehicles such as larger single-unit trucks, combination tractor-trailers, transit buses, and motorcoaches (GVWR greater than 11,793 kg (26,000 lbs.)). 28 Sales data for 2018 and 2019 shows that on average 332,558 class 7–8 vehicles per year were sold in the U.S. Approximately 77 percent of these were class 8 vehicles. NHTSA estimates that class 7 and 8 vehicles are involved in 30,416 rear-end crashes where the heavy vehicle is the striking vehicle. As a result of these crashes, there were an annual average of 204 fatalities, 15,117 injuries, and 42,466 PDOVs. As these data indicate, the numbers of crashes, fatalities, injuries, and PDOVs are very similar for both class 3–6 and class 7–8.
28 These vehicles are subject to FMVSS No. 136 and so must have ESC.
Rear-End Crashes by Vehicle Travel Speed and Roadway Speed Limit
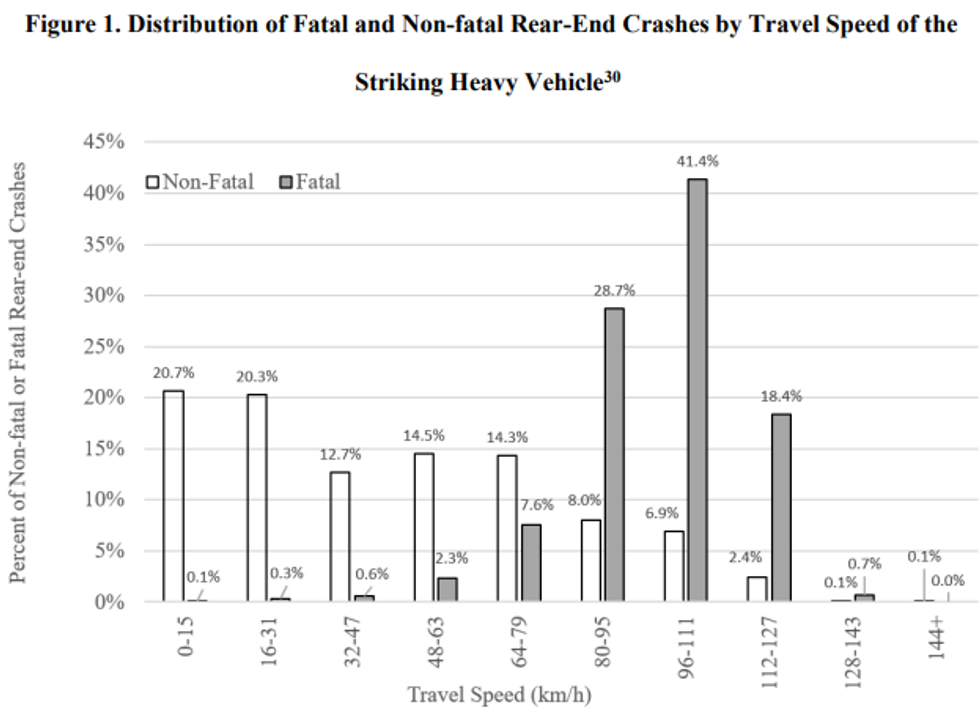
Pre-crash vehicle travel speed is highly important in understanding the heavy vehicle rear-end crash problem and is perhaps the most influential factor in outcome of these crashes. In NHTSA's analysis of the data, travel speed of the striking vehicle was markedly different when comparing non-fatal and fatal rear-end truck crashes. As shown in Figure 1, the percentage of heavy vehicle rear-end crashes with a fatality is greatest at higher travel speeds. 29 Approximately 89 percent of fatal heavy vehicle rear-end crashes occur at above 80 km/h (50 mph). For non-fatal heavy vehicle rear-end crashes, the trend is more or less reversed, with approximately 83 percent of these crashes occurring at travel speeds below 80 km/h (50 mph). These data illustrate the distribution of a crash problem across all travel speeds.
29 Note that the figure shows percentage of the total number of fatal or non-fatal crashes. The total number of crashes is much greater for non-fatal crashes.
BILLING CODE 4910–59–P
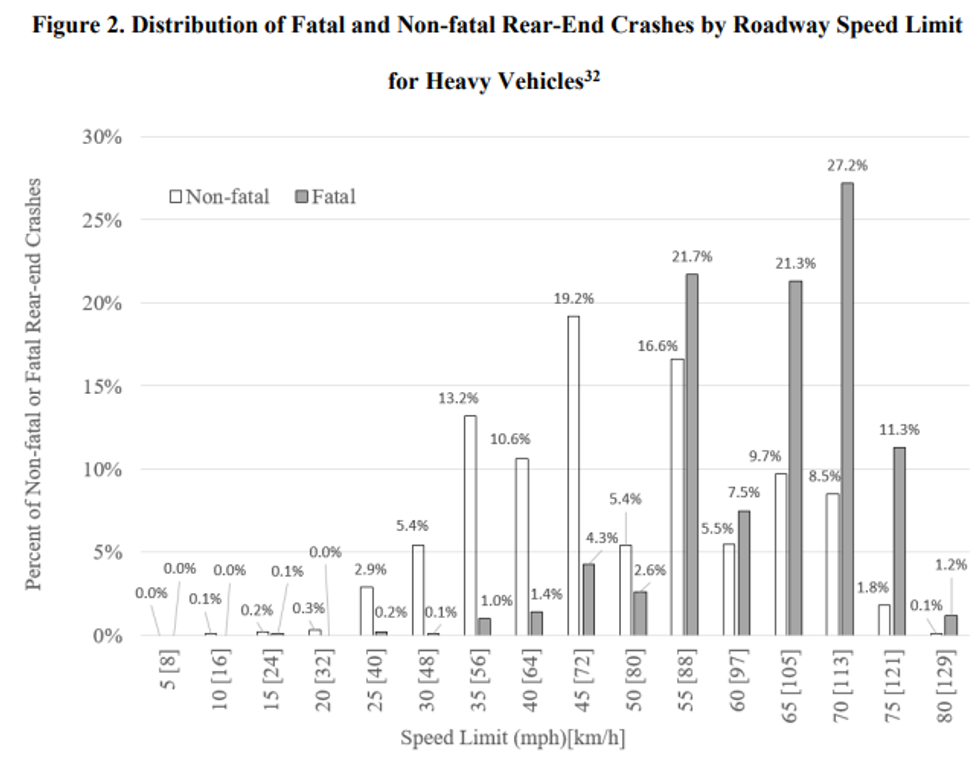
The speed limits in heavy vehicle rear-end crashes also show a similar trend. NHTSA categorized the fatal and non-fatal crash data according to posted speed limit at the crash location, as illustrated in Figure 2. 31 These data show that over 90 percent of heavy vehicle rear-end crashes with a fatality occur on roadways with a posted speed limit higher than 50 mph (80 km/h). This reinforces the association between higher speeds and fatal crash outcome in these types of crashes. In contrast, non-fatal rear-end crashes tend to occur most commonly on roads with lower speed limit, with a peak frequency at speed limits of 45 mph (72 km/h). These data help in understanding the conditions under which heavy vehicle rear-end crashes of different severities occur.
30 Data are from 2017–2019 FARS and CRSS crash databases, as discussed in the PRIA section on target population.
31 These data naturally are clustered around 5 mph intervals normally assigned for posted speed limits on roadways.
BILLING CODE 4910–59–C
Safety Problem That Can Be Addressed by AEB
NHTSA identified the set of crashes that might be prevented by AEB systems equipped on heavy vehicles. To determine these crashes for this NPRM, NHTSA analyzed 2017 through 2019 crash data for heavy vehicles. The 2017 through 2019 years were chosen because they provide the most recent available data, and thus reflect newer model year vehicles, safety technologies, and crash environments. 33 The crash-related statistics discussed in this section, often depicted as annual averages, are derived from these data.
32 Data are from 2017–2019 FARS and CRSS crash databases, as discussed in the PRIA section on target population.
33 Crash data from 2020, although available, were excluded due to a significant reduction in weighted cases for CRSS. The 2020 data was greatly influenced by COVID–19 and might not reflect the long-term trend of crash outcomes, as described in the accompanying PRIA.
To develop a target crash population relevant to AEB, the agency identified crashes that were classified as rear-end crashes as instructed by the FARS/CRSS manual and in which the striking vehicle was a heavy vehicle. NHTSA analyzed rear-end crashes in which the vehicle ahead is categorized as being either stopped, travelling at a lower speed, or decelerating, and also examined a few other categories to account for rear-end crashes that did not fit into the three categories. Additionally, NHTSA included some other cases which, although not classified as rear-end, were multi-vehicle crashes that still involved the front end of a heavy vehicle colliding with the rear-end of another vehicle.
NHTSA believes that AEB will help reduce the severity of rear-end crashes occurring in a wide variety of real-world situations. However, the data analysis presented some rear-end crash cases where, due to a significant sequence of events or other conditions preceding the crash, the agency had less certainty of the extent to which AEB systems would be able to reduce the crash severity. For example, if the data indicated that the heavy vehicle had changed lanes just prior to colliding with a vehicle ahead, there would potentially not have been sufficient time and/or space for the AEB system to properly identify and track that vehicle and brake in time to avoid the crash. As another example, if the road surface conditions were icy and slippery, the AEB system may have been less likely to prevent a crash due to the reduced friction and increased stopping distances. In another example, if the struck vehicle was a motorcycle, NHTSA is uncertain of the AEB system's capacity to perform optimally since motorcycles may be more difficult to detect. 34
34 NHTSA is currently conducting research tests to understand AEB performance in light vehicle rear-end crashes with motorcycles. Two types of AEB sensor types ( e.g., camera and camera radar) were investigated. See www.regulations.gov, Docket No. NHTSA–2022–0091. A study by the RDW, the vehicle authority in the Netherlands, indicated that adaptive cruise control systems (which detect a vehicle ahead, similar to AEB) had more difficulty detecting motorcycles. https://www.femamotorcycling.eu/wp-content/uploads/Final%20Report_motorcycle_ADAS_RDW.pdf (last accessed February 10, 2023).
NHTSA believes that, even in these situations where AEB performance may be partially degraded, having AEB will still be beneficial. It may not, for example, prevent a crash but it may reduce its severity by slowing the striking vehicle down. However, the agency took a conservative approach and excluded cases such as those above from the target crash population, and included only those cases in which AEB systems would have the opportunity to perform optimally. This approach gives greater confidence that the crashes included in the target crash population would be prevented by having AEB-equipped vehicles. 35
35 The PRIA discusses the rear-end crashes that were excluded from the target population.
The result is that out of the 550,000 annual police reported crashes involving heavy vehicles, approximately 60,000 annually are rear-end crashes in which the heavy vehicle was the striking vehicle. Thus, if heavy vehicles were equipped with AEB, a portion of these 60,000 crashes could be prevented. These 60,000 crashes, between 2017 and 2019, resulted in an annual average of approximately 388 fatalities, 30,000 injuries, and 84,000 PDOVs.
By requiring ESC for most class 3 through 6 vehicles, the proposed rule would affect approximately 17,000 rollover and loss of control crashes. These crashes resulted in 178 fatalities, 4,000 injuries, and 13,000 PDOVs, a portion of which could be prevented if class 3 through 6 heavy vehicles were equipped with ESC. These numbers are set forth in Table 7.
| Crashes | Fatalities | Injuries | PDOVs | |
|---|---|---|---|---|
| AEB | 60,000 | 388 | 30,000 | 84,000 |
| ESC | 17,000 | 178 | 4,000 | 13,000 |
III. Efforts To Promote AEB Deployment in Heavy Vehicles
Unlike with light vehicles in the U.S., there is currently no voluntary commitment by heavy vehicle manufacturers to begin installing AEB on all new vehicles. 36 Nor is there a program similar to NHTSA's New Car Assessment Program (NCAP) for heavy vehicles. However, NHTSA and FMCSA have researched heavy vehicle AEB. In addition, Congress, other governmental agencies, and a variety of stakeholders recognize that this technology has the potential to reduce the fatalities, injuries, and property damage associated with heavy vehicle rear-end crashes. The installation rate of AEB in the U.S. vehicle fleet has gradually increased, and the latest generations of the technology are higher performing than the original implementations.
36 On March 17, 2016, NHTSA and the Insurance Institute for Highway Safety (IIHS) announced a commitment by 20 automakers representing more than 99 percent of the U.S. auto market to make lower speed AEB a standard feature on virtually all new cars no later than Sept 1, 2022. https://www.nhtsa.gov/press-releases/us-dot-and-iihs-announce-historic-commitment-20-automakers-make-automatic-emergency.
A. NHTSA's Foundational AEB Research
NHTSA has been studying emergency braking technologies since manufacturers first introduced these technologies over fifteen years ago. NHTSA has recognized the safety potential of heavy vehicle AEB for many years and continued to research this technology as it evolved from early generations to its current state. As part of NHTSA's efforts to better understand these new crash avoidance technologies, NHTSA sponsored and conducted numerous research projects focused on AEB and FCW for heavy trucks. NHTSA conducted testing at its in-house testing facility, the Vehicle Research and Test Center, to examine the performance of AEB in different combinations of crash scenarios and speeds.
NHTSA's foundational knowledge of braking technology was built on a long history of work on FMVSS No. 105, “Hydraulic and electric brake systems,” No. 121, “Air brake systems,” and No. 136, “Electronic stability control systems for heavy vehicles.”
FMVSS No. 105 applies to multipurpose passenger vehicles, trucks, and buses with a GVWR greater than 3,500 kg (7,716 lbs.) that are equipped with hydraulic or electric brake systems. This standard sets performance requirements for, among other things, maximum stopping distance, anti-lock braking systems, stability and control under braking (including a curved and wet road surface), and recovery from brake fade. 37
37 Brake fade events are associated with speed control on roads with steep or gradual but long downgrades. As brake temperature increases in a drum, its diameter expands as the metal heats up; this means the brake shoe displacement must also increase to be effective. Eventually, the shoe reaches the displacement limit, and then brake effectiveness drops off.
FMVSS No. 121 applies to trucks, buses, and trailers equipped with air (pneumatic) brake systems, with a few exceptions for special vehicle types. Although NHTSA sets no standards regarding the choice between using hydraulic, electric, or air brakes, vehicles with a larger size and load carrying capacity are more likely to have air brakes. Thus, air brakes are typically installed on some class 6 and most class 7–8 vehicles. Lower classes often use hydraulic brakes. A few examples of the requirements in FMVSS No. 121 are maximum stopping distance, having ABS, maintaining stability and control when braking to a stop on a curved and wet roadway test surface, recovering from brake fade, and having an emergency (backup) brake system.
FMVSS No. 136 establishes performance and equipment requirements for electronic stability control systems on truck tractors and certain large buses, for the purpose of reducing crashes caused by rollover or by loss of directional control. This standard currently applies to truck tractors and certain large buses with a GVWR greater than 11,793 kilograms (26,000 lbs.). FMVSS No. 136 requires vehicles to be equipped with an ESC system, and to meet several minimum performance requirements. For example, when driven on a specified J-shaped test lane under a variety of specified conditions and parameters which induce ESC activation, the wheels of the heavy vehicle must remain within the lane.
B. NHTSA's 2015 Grant of a Petition for Rulemaking
In October 2015, NHTSA granted a petition for rulemaking from the Truck Safety Coalition, the Center for Auto Safety, Advocates for Highway and Auto Safety, and Road Safe America. This petition requested “the commencement of a proceeding to establish a safety regulation to require the use of [FCW and AEB] on all vehicles (trucks and buses) with a gross vehicle weight rating (GVWR) of 10,000 pounds (lbs.) or more.” The petitioners maintained that AEB has important benefits and is a technology that has been improving in performance, but that a regulation is needed to optimize the benefits of the technology and increase the frequency of installation in heavy vehicles. The agency granted this petition on October 16, 2015, noting that NHTSA's research and evaluation were ongoing, and initiated a rulemaking proceeding with respect to vehicles with a GVWR greater than 4,536 kg (10,000 lbs.). 38
38 Grant of petition for rulemaking, 80 FR 62487 (October 16, 2015).
C. Congressional Interest
1. MAP–21
In July 2012, the Moving Ahead for Progress in the 21st Century Act was enacted. MAP–21 included Subtitle G, the “Motorcoach Enhanced Safety Act of 2012.” 39 Section 32705 of MAP–21 directed the Secretary (NHTSA, by delegation) to research and test forward and lateral crash warning systems for motorcoaches and decide whether a corresponding safety standard would accord with section 30111 of the Safety Act. Section 32703(b)(3) directed the Secretary to consider requiring motorcoaches to be equipped with stability enhancing technology, such as electronic stability control, to reduce the number and frequency of rollover crashes, and prescribe a standard if it would meet the requirements and considerations of sections 30111(a) and (b) of the Safety Act. 40 In response, NHTSA issued FMVSS No. 136, requiring ESC for certain truck tractors and buses (including motorcoaches) with a GVWR greater than 13,154 kg (26,000 lbs.).
39 Public Law 112–141, Sec. 32705.
40 Section 32703(b) required a regulation not later than two years after the date of enactment of the Act if DOT determined that such standard met the requirements of the Safety Act.
2. Bipartisan Infrastructure Law
In November 2021, the Bipartisan Infrastructure Law (BIL) was signed into law. Section 23010 of BIL is dedicated to AEB. Section 23010(a) of BIL defines an AEB system as a system on a commercial motor vehicle that, based on a predefined distance and closing rate with respect to an obstacle in the path of the vehicle, alerts the driver of an obstacle and, if necessary, applies the brakes automatically to avoid or mitigate a collision with that obstacle.
Section 23010(b) requires the Secretary to prescribe an FMVSS to require all commercial motor vehicles 41 subject to FMVSS No. 136 (or a successor regulation) to be equipped with an AEB system. The FMVSS is also required to establish performance standards for AEB systems. BIL directs the Secretary to prescribe the standard not later than two years after the date of enactment of the Act.
41 As defined in 49 U.S.C. 31101, “commercial motor vehicle” means a self-propelled or towed vehicle used on the highways in commerce principally to transport passengers or cargo, if the vehicle has a gross vehicle weight rating or gross vehicle weight of at least 10,001 pounds, whichever is greater; is designed to transport more than 10 passengers including the driver; or is used in transporting material found by the Secretary of Transportation to be hazardous and transported in a quantity requiring placarding under regulations.
Under Section 23010(b)(2), prior to prescribing the FMVSS, the Secretary is required to conduct a review of AEB systems in use in applicable commercial motor vehicles and address any identified deficiencies in those systems in the rulemaking proceeding, if practicable. In addition, the Secretary is required to consult with representatives of commercial motor vehicle drivers to learn about their experience with AEB (including malfunctions and/or unwarranted activations).
This NPRM is issued to meet these provisions of the BIL. NHTSA conducted a review of AEB systems in use in commercial motor vehicles to identify limits in those systems. A memorandum summarizing this review has been placed in the docket for this NPRM and has informed the development of the proposal. NHTSA is also currently conducting research to study drivers' experiences with collision mitigation technologies, including AEB. Comments are requested on the feasibility of mandating AEB for commercial motor vehicles with GVWR greater than 10,000 pounds which are not currently subject to FMVSS No. 136. This NPRM requests comments from representatives of commercial motor vehicle drivers, and drivers themselves, regarding the experience with the use of AEB systems. This NPRM also includes a series of questions in section VII.E on which NHTSA seeks comment to obtain information about drivers' experiences with AEB (including malfunctions and/or unwarranted activations).
Section 23010(c) of the BIL relates to the regulations of FMCSA, which regulate the operation of commercial motor vehicles. BIL requires an FMCSR ensuring that the AEB systems required by the FMVSS for new commercial vehicles subject to FMVSS No. 136 be in use at any time during which the vehicle is in operation. This NPRM proposes this FMCSR. 42
42 FMCSA has also created an apprenticeship program for novice drivers of commercial motor vehicles pursuant to the BIL. The program requires novice drivers to operate vehicles that possess an active braking collision mitigation system, such as AEB. 87 FR 2477, January 14, 2022.
Finally, section 23010(d) of BIL requires DOT to complete a study on equipping a variety of commercial motor vehicles not currently required to comply with FMVSS No. 136 with AEB. This study is to include an assessment of the feasibility, benefits, and costs associated with installing AEB on these vehicles. As discussed in greater detail later, the analysis accompanying this NPRM fulfills this requirement.
D. IIHS Effectiveness Study
In a 2020 report, the Insurance Institute for Highway Safety studied the effectiveness of FCW and AEB technology on class 8 trucks and concluded that safety will improve if more trucks have these technologies installed. 43 IIHS used data extracted from video camera footage and crash rates of police-reportable crashes. While the study sample did not contain a large number of severe crashes, FCW and AEB were still associated with significant reductions in rear-end crashes involving trucks. On average, between the time of collision and moment of system intervention, the velocity of the striking vehicle was reduced by greater than 50 percent. The study concluded that safety would improve if more trucks had these technologies installed. 44 The IIHS study was limited to class 8 trucks and involved certain fleets and drivers which may not necessarily be representative of the U.S. fleet as a whole. Because of this limitation, NHTSA could not use the findings to calculate the potential benefits of this proposal.
43 Teoh, Eric R. (2020, September). Effectiveness of front crash prevention systems in reducing large truck crash rates. Arlington, VA: Insurance Institute for Highway Safety. Available at https://www.iihs.org/topics/bibliography/ref/2211#:~:text=Results%3A%20FCW%20was%20associated%20with,%25%20for%20rear%2Dend%20crashes. (last accessed August 30, 2022).
44 Id.
E. DOT's National Roadway Safety Strategy (January 2022)
This NPRM takes a crucial step in implementing DOT's January 2022 National Roadway Safety Strategy to address the rising numbers of transportation deaths occurring on this country's streets, roads, and highways. 45 At the core of this strategy is the Department-wide adoption of the Safe System Approach, which focuses on five key objectives: safer people, safer roads, safer vehicles, safer speeds, and post-crash care. The Department will launch new programs, coordinate and improve existing programs, and adopt a foundational set of principles to guide this strategy.
45 https://www.transportation.gov/sites/dot.gov/files/2022-01/USDOT_National_Roadway_Safety_Strategy_0.pdf (last accessed August 23, 2022).
The National Roadway Safety Strategy highlights new priority actions that target our most significant and urgent problems and are, therefore, expected to have the most substantial impact. One of the key Departmental actions to enable safer vehicles is initiating a rulemaking to require AEB on heavy trucks. This NPRM proposes a Federal Motor Vehicle Safety Standard to require AEB on heavy trucks and other heavy vehicles.
F. National Transportation Safety Board Recommendations
The National Transportation Safety Board (NTSB) included AEB for commercial vehicles in its 2021–2023 Most Wanted List. 46 Among other things, NTSB stated that NHTSA should complete standards for AEB in commercial vehicles and require this technology in all highway vehicles and all new school buses.
46 NTSB Most Wanted List, https://www.ntsb.gov/Advocacy/mwl/Pages/mwl-21-22/mwl-hs-04.aspx (last accessed August 23, 2022).
In 2015, NTSB issued a special investigation report, 47 which summarized previous, as well as new, findings related to AEB in a variety of vehicles. Regarding heavy vehicles, this report presented the following recommendation to NHTSA:
47 National Transportation Safety Board. 2015. The Use of Forward Collision Avoidance Systems to Prevent and Mitigate Rear-End Crashes. Special Investigation Report NTSB/SIR–15–01. Washington, DC. Available at https://www.ntsb.gov/safety/safety-studies/Documents/SIR1501.pdf (last accessed August 22, 2022).
• H–15–05: Complete, as soon as possible, the development and application of performance standards and protocols for the assessment of forward collision avoidance systems in commercial vehicles.
In a 2018 special investigation report, 48 the NTSB discussed two severe accidents involving school buses. In the conclusion of the report, the NTSB stated that AEB could have helped mitigate the severity of one of the accidents, and that ESC could have helped mitigate the other. Accordingly, the following safety recommendations were made or restated to NHTSA:
48 National Transportation Safety Board. 2018. Selective Issues in School Bus Transportation Safety: Crashes in Baltimore, Maryland, and Chattanooga, Tennessee. NTSB/SIR–18/02 PB2018–100932. Washington, DC. Available at https://www.ntsb.gov/investigations/AccidentReports/Reports/SIR1802.pdf (last accessed August 22, 2022).
• H–18–08: Require all new school buses to be equipped with collision avoidance systems and automatic emergency braking technologies.
• H–11–7: Develop stability control system performance standards for all commercial motor vehicles and buses with a gross vehicle weight rating greater than 10,000 pounds, regardless of whether the vehicles are equipped with a hydraulic or a pneumatic brake system.
• H–11–8: Once the performance standards from Safety Recommendation H–11–7 have been developed, require the installation of stability control systems on all newly manufactured commercial vehicles with a gross vehicle weight rating greater than 10,000 pounds.
G. FMCSA Initiatives
FMCSA has been engaged in activities to advance the voluntary adoption of AEB for heavy vehicles, primarily through the Tech-Celerate Now (TCN) program. This program focuses on accelerating the adoption of Advanced Driver Assistance Systems (ADAS), such as AEB, by the trucking industry to reduce fatalities and prevent injuries and crashes, in addition to realizing substantial return-on-investment through reducing costs associated with such crashes for the motor carrier. Initiated in September 2019 and completed in February 2022, the first phase of this program encompassed research into ADAS technology adoption barriers; a national outreach, educational, and awareness campaign; and data collection and analysis.
Outreach accomplishments included development of training materials for fleets, drivers, and maintenance personnel related to AEB technology and return-on-investment (ROI) guides; educational videos on ADAS braking, steering, warning, and monitoring technologies; a web-based TCN ADAS-specific ROI calculator; four articles on ADAS technologies; and a program website to host the training materials.
As part of the national outreach campaign, the program was promoted on social media including LinkedIn and Twitter, and FMCSA conducted presentations and booth exhibitions at conferences, webinars, and virtual meetings. Recent efforts have included discussion of a safety effective analysis project that is using two years of naturalistic data collected from AEB and other ADAS technologies at the American Trucking Associations Technology and Maintenance Council's 2022 Annual meeting, the 2022 Midwest Commercial Vehicle Safety Summit, and the 2022 Southeast Commercial Vehicle Safety Summit. The results of this project are expected be published late in calendar year 2023.
Planning is underway for the second phase of the TCN program, which includes an expanded national outreach and education campaign, additional research into the barriers to ADAS adoption by motor carriers, and evaluation of the outreach campaign.
IV. NHTSA and FMCSA Research and Testing
A. NHTSA-Sponsored Research
The following are brief summaries of some of the research NHTSA sponsored relating to strategies to avoid heavy vehicle collisions with lead vehicles. The agency funded several research efforts to assess collision avoidance systems, including AEB.
1. 2012 Study on Effectiveness of FCW and AEB
On August 2012, the University of Michigan Transportation Research Institute (UMTRI) conducted a simulation study under a cooperative agreement between NHTSA and AEB supplier WABCO. 49 The objective of the study was to estimate the safety benefits FCW and AEB systems implemented on heavy trucks, including single-unit and tractor-semitrailers. The study characterized technology, estimated a target crash population, created a simulated reference crash database, and assessed the impact of the technologies in a simulated environment. These results were then applied to the target crash population. The study not only simulated benefits for equipping heavy trucks with then-available technology, but also simulated benefits for next and future systems that were expected to have enhanced capabilities.
49 Woodrooffe, J., et al., “Performance Characterization and Safety Effectiveness Estimates of Forward Collision Avoidance and Mitigation Systems for Medium/Heavy Commercial Vehicles,” Report No. UMTRI–2011–36, UMTRI (August 2012). Docket No. NHTSA–2013–0067–0001, available at https://www.regulations.gov/document/NHTSA-2013-0067-0001.
The study simulated estimates based on next and future systems that would utilize radar as the main sensor, and provided haptic, auditory, and visual warnings to the driver (just as the current in-production system). The in-production system could decelerate the vehicle up to a maximum of 0.35g without any driver intervention. However, it could not react to fixed objects ( i.e., objects that were stationary before they were in the range of the radar). The primary improvements expected for the next system included the ability to react and brake at about 0.3g in response to fixed objects and increased braking control authority on stopped and moving vehicles to engage the foundation brakes to produce as much as 0.6g of longitudinal deceleration. The study used the same increased control authority on stopped and moving vehicles as the next generation system, but required the system to more aggressively react to fixed objects with longitudinal deceleration of up to 0.6g.
Based on these capabilities, the study estimated that equipping all tractor-semitrailers with AEB and FCW would reduce fatalities relative to the base population for current, next, and future generation systems by 24, 44, and 57 percent, respectively. Additionally, the predicted reduction in injuries compared to the base population for current, next, and future generation systems was estimated at 25, 47, and 54 percent, respectively. The combined annual benefit for straight truck and tractor semitrailers, including property damage reduction for current, next, and future generation systems was estimated at $1.4, $2.6, and $3.1 billion, respectively.
The study concluded with multiple observations. The enhancements depicted by the next generation system in comparison to the current generation system were substantially larger than when comparing the next generation to the future generation. These improvements were due mainly to the ability of the system to react to fixed vehicles and the increased braking. Overall, this evaluation depicted that the collision mitigation measures studied would achieve significant benefits.
2. 2016 Field Study
NHTSA sponsored a field study with the Virginia Tech Transportation Institute (VTTI) to assess the performance of heavy-vehicle crash avoidance systems using 150 Class 8 tractor-trailers. 50 The vehicles were each equipped with a collision avoidance system from one of two companies that included AEB and FCW. The purpose of the study was to evaluate system reliability, assess driver performance over time, assess overall driving behavior, provide data on real-world conflicts, and generate inputs to a safety benefits simulation model.
50 See “Field Study of Heavy-Vehicle Crash Avoidance Systems” (June 2016), available at https://www.nhtsa.gov/sites/nhtsa.gov/files/812280_fieldstudyheavy-vehiclecas.pdf (last accessed June 3, 2022).
The vehicles were operated by drivers for one year with a total of over 3 million miles travelled. Each vehicle was equipped with a data acquisition system that collected roadway-facing video, driver-facing video, activations, and vehicle network data. About 85,000 hours of driving and 885,000 activations were collected across all activation types. Of the sampled 6,000 activations, 264 were AEB activations and 1,965 were impact alerts.
According to the study, safety benefits of collision avoidance systems could be estimated based on data describing driver use of systems and their responses to the activations. Since the systems depict warnings through an audio and visual display, a precise model of the benefits would show how fast drivers react and if reactions vary based on warning type. For 84 percent of the AEB activations, the driver reacted prior to the alert, and 13 percent of the time, the driver responded to the alert. Drivers did not respond to 3 percent of the AEB activations. Over 50 percent of the false AEB activations received driver responses. Average driving speeds and headway distances at the initiation of AEB activations prior to safety-critical events were similar to values recorded for other activations. While at the initiation of many warranted AEB activations, drivers had already implemented braking, every warranted AEB activation did not receive a driver reaction.
The analysis included a driver frustration assessment for each AEB activation. This was a subjective assessment based on whether drivers appeared to show frustration during an activation. Advisory warnings resulted in lower percentages of general frustration. The highest instances of frustration were noted during false activations with frustration noted 11 percent of the time.
In summary, the study found that crash avoidance systems can be effective in collision avoidance. Driver performance and behavior exhibited almost no changes over time, and there was limited frustration with the AEB activations. There were some limitations in the study including varied calibration options between the systems, no control group, different geographical locations, and unequal driving time amongst participants.
3. 2017 Target Population Study
In 2017, NHTSA completed a study on a target population for AEB in vehicles with a GVWR over 4,536 kg (10,000 pounds). 51 The objective of the study was to determine which forward collisions would theoretically benefit from AEB if all vehicles over 4,536 kg (10,000 pounds) GVWR were equipped with the system. First, NHTSA reviewed literature for then-existing AEB systems manufactured by Bendix and Meritor. Although the systems varied in some ways, they shared a tiered functionality approach, including the sequential use of auditory and visible warnings, automatic torque reduction, application of the engine retarder, and finally automatic brake application as needed. 52 The research efforts concentrated on the FCW and CIB elements.
51 See “A Target Population for Automatic Emergency Braking in Heavy Vehicles,” available at https://crashstats.nhtsa.dot.gov/Api/Public/Publication/812390 (last accessed June 7, 2022).
52 See page 8 “A Target Population for Automatic Emergency Braking in Heavy Vehicles,” available at https://crashstats.nhtsa.dot.gov/Api/Public/Publication/812390 (last accessed June 7, 2022).
Second, collisions were sampled from NHTSA and FMCSA's Large Truck Crash Causation Study 53 for an engineering review because this database provides comprehensive information on heavy vehicle collisions in the United States. The engineering review focused on 29 crashes from the Large Truck Crash Causation Study that involved injuries and fatalities to determine whether FCW and/or CIB would be effective in preventing the crash. Effectivity was defined as both reviewing engineers determining that there was a 50 percent chance or greater that the crash would be prevented. The analysis determined that FCW and CIB would both be effective in preventing 17 of the 29 crashes, much more often than cases in which only either was effective or neither was effective. Considering a summary of the weighted effectiveness, the combination of FCW and CIB were effective in 50 percent of the cases. While FCW alone was effective in 23 percent of cases, there was a significant 21 percent of cases where neither FCW nor CIB was effective. 54
53 See “Large Truck Crash Causation Study,” available at https://www.fmcsa.dot.gov/safety/research-and-analysis/large-truck-crash-causation-study-analysis-brief (last accessed October 19, 2022).
54 Additionally, there was at least one case that consensus was not reached regarding the effectiveness of CIB, and there was no investigation of crashes of lower severity where only property damage resulted.
Third, the outcomes from the first two phases allowed for the development of filters to identify the categories of collisions that AEB would improve. These filters were then implemented to collisions in NHTSA's crash databases to approximate how many collisions annually AEB could have prevented. A combination of data from the FARS and the GES was used for the calculations while ensuring that an overlap in fatal crashes was removed to prevent duplicate tallies. Vehicle collision information for the United States involving injuries and fatalities for years 2010 to 2012 was utilized from these databases. 55 Both injury-related and fatal collisions totaled 5,457,387, and this total was filtered to determine the target population. The filtering exclusions were made cautiously in order to yield a conservative benefit estimate. Crashes during which the subject vehicle departed from its original travel lane and the lead vehicle maintained the lane were not included. Similarly, collisions involving the lead vehicle changing from the original lane and the subject vehicle remaining in its lane were excluded. Additional exclusions included collisions on icy and snowy roads, situations where the lead vehicle turns from a perpendicular street in front of the subject vehicle, cases involving acceleration maneuvers to avoid collision, collisions where the lead vehicle was obscured by an object, collisions into motorcycles, and cases where the subject vehicle was traveling on a curved road toward an object such as a guardrail.
55 LTCCS was not selected due to the age of the crash data, for it is possible heavy vehicle collisions differ tremendously since 2001. The UMTRI Trucks Involved in Fatal Accidents study ( https://deepblue.lib.umich.edu/bitstream/handle/2027.42/107389/48532_A56.pdf?isAllowed=y&sequence=1, last accessed June 3, 2022) was excluded because its detailed information regarding vehicle style and driving time is only provided for collisions involving fatalities, where data for collisions of less severity involving only injuries would not be available.
Fourth, the target population estimated in the third phase was modified to reflect recent and probable future regulations. This modification eliminated collisions that would be avoided based on the implementation of other required technologies that had not yet completely proliferated in heavy vehicles. Accounting for safety equipment including ESC, ABS, and speed limiters allowed for the overall target population to be modified to reflect the anticipated number of future collisions. Crashes that were included in the final future target population were those involving heavy vehicles in which the rear-end crash resulted in injuries and fatalities. Further, the crashes were refined to include only crashes where both vehicles remained in the original lane after the crash was deemed imminent and collisions where lane changes prior to crash imminency were allowed as long as only one of the vehicles changed lanes. Additionally, situations where the driver attempted to steer around the collision or used insufficient braking were included.
After all adjustments were completed, the study estimated a target population of 11,499 crashes annually involving 7,703 injured persons and 173 fatalities. It also discussed possible sampling error as well as three sources of uncertainty. However, the size of a target population provided only an estimated upper bound to the benefits at that time. The report added value in the detailed descriptions of affected crashes and subpopulation breakouts that have traditionally fed into benefits estimation.
4. 2018 Cost and Weight Analysis
In 2018, Ricardo Inc. completed a study sponsored by NHTSA that focused on the cost and weight implications of requiring AEB on heavy trucks. The study aimed to determine the product price, total system cost, incremental consumer price, and weight of FCW and AEB systems on heavy trucks to provide insight into the safety and efficiency benefits of using the systems. 56 The initial steps of the study were vehicle research, vehicle segregation, and vehicle selection. Model year 2015–2018 heavy vehicles manufactured by Ford, Cascadia, Volvo, Daimler, and International LT were chosen for teardown examination and ranged in mean annual sales from approximately 24,000 to 86,542. The associated FCW and AEB systems installed on these vehicles were manufactured by Delphi Technologies, Meritor, Bendix Commercial Vehicle Systems, and Detroit Assurance (Daimler).
56 Ricardo, Inc. (2018), “Cost and Weight Analysis of Heavy Vehicle Forward Collision Warning (FCW) and Automatic Emergency Braking (AEB) Systems for Heavy Trucks” Van Buren Township, MI.
Service technician consultations, manuals, and OEM parts descriptions were used to itemize components of the FCW and AEB systems. Specific assessments of the related displays, sensors, mounting hardware, and other elements of the FCW and AEB systems were provided to prevent extraneous parts from being included in the cost and weight evaluations. The cost and weight evaluations were executed by a group of automotive system and integration experts, cost modeling specialists, and procurement personnel. A bill of materials was compiled using a “teardown” process to inventory the parts, define manufacturing processes, and ascertain materials utilized. Specialized cost software allowed for calculation of cost and weight.
In general, components that were not distinct to the FCW and AEB systems were not included in the cost and weight evaluation. Therefore, shared parts such as electronic control units and wiring harnesses were not considered as additions if they were already incorporated into the vehicle configuration without FCW/AEB. The manufacturing costs were estimated, factoring in research and development, labor, material costs, machinery, machine occupancy and tooling.
The five selected vehicles were the Ford F-Series Super Duty, Freightliner M2–106, Freightliner Cascadia, International LT, and Volvo VNL. While there was some overlap of similar components, the FCW and AEB systems in the five selected vehicles had substantial variation amongst the system mechanisms and functionality. Based on these differences the vehicles were separated into four groups, and the average manufacturing costs and weights were assessed for each category. Overall, the average incremental cost to manufacturers for these FCW/AEB systems ranged from $44.23 to $197.51; and associated end-user prices ranged from $70.80 to $316.18. Additionally, the average incremental weights ranged from approximately 0.46 to 3.10 kg.
B. VRTC Research Report Summaries and Test Track Data
1. Relevance of Research Efforts on AEB for Light Vehicles
AEB was first introduced on light vehicles. For this reason, NHTSA's research and testing of AEB systems began with light vehicles and was subsequently used to inform NHTSA's work on heavy vehicle AEB.
NHTSA conducted extensive research on AEB systems to support development of the technology and eventual deployment in vehicles. There were three main components to this work. Early research was conducted on FCW systems that warn drivers of potential rear-end crashes with other vehicles. This was followed by research into AEB systems designed to prevent or mitigate rear-end collisions through automatic braking.
NHTSA's earliest research on FCW systems began in the 1990s, at a time when the systems were under development and evaluation had been conducted primarily by suppliers and vehicle manufacturers. NHTSA collaborated with industry stakeholders to identify the specific crash types that an FCW system could be designed to address, the resulting minimum functional requirements, and potential objective test procedures for evaluation. 57 In the late 1990s, NHTSA worked with industry to conduct a field study, the Automotive Collision Avoidance System Program. NHTSA later contracted with the Volpe National Transportation Systems Center (Volpe) to conduct data analyses of data recorded during that field study. 58 From this work, NHTSA learned about the detection and alert timing and information about warning signal modality (auditory, visual, etc.) of FCW systems, and predominant vehicle crash avoidance scenarios where FCW systems could most effectively play a role in alerting a driver to brake and avoid a crash. In 2009, NHTSA synthesized this research in the development and conduct of controlled track test assessments on three vehicles equipped with FCW. 59
57 This research was documented in a report, “Development and Validation of Functional Definitions and Evaluation Procedures for Collision Warning/Avoidance Systems,” Kiefer, R., et al., DOT HS 808 964, August 1999. Additional NHTSA FCW research is described in Zador, P.L., et al., “Final Report—Automotive Collision Avoidance System (ACAS) Program,” DOT HS 809 080, August 2000; and Ference, J.J., et al., “Objective Test Scenarios for Integrated Vehicle-Based Safety Systems,” Paper No. 07–0183, Proceedings of the 20th International Conference for the Enhanced Safety of Vehicles, 2007.
58 Najm, W.G., Stearns, M.D., Howarth, H., Koopmann, J., and Hitz, J., “Evaluation of an Automotive Rear-End Collision Avoidance System,” DOT HS 810 569, April 2006 and Najm, W.G., Stearns, M.D., and Yanagisawa, M., “Pre-Crash Scenario Typology for Crash Avoidance Research,” DOT HS 810 767, April 2007.
59 Forkenbrock, G., O'Harra, B., “A Forward Collision Warning (FCW) Program Evaluation, Paper No. 09–0561, Proceedings of the 21st International Technical Conference for the Enhanced Safety of Vehicles, 2009.
NHTSA's research and test track performance evaluations of AEB began around 2010. The agency began a thorough examination of the state of forward-looking advanced braking technologies, analyzing their performance and identifying areas of concern or uncertainty, to better understand their safety potential. NHTSA issued a report 60 and a request for comments (RFC) seeking feedback on its CIB and DBS research in July 2012. 61 Specifically, NHTSA wanted to enhance its knowledge further and help guide its continued efforts pertaining to AEB effectiveness, test operation (including how to ensure repeatability using a target or surrogate vehicle), refinement of performance criteria, and exploration of the need for “false positive” tests to minimize the unintended negative consequences of automatic braking in non-critical driving situations where a crash was not imminent.
60 The agency's initial research and analysis of CIB and DBS systems were documented in a report, “Forward-Looking Advanced Braking Technologies: An analysis of current system performance, effectiveness, and test protocols” (June 2012). http://www.regulations.gov, NHTSA 2012–0057–0001.
61 77 FR 39561.
NHTSA considered feedback it received on the RFC and conducted additional testing to support further development of the test procedures. The agency's work was documented in two additional reports, “Automatic Emergency Braking System Research Report” (August 2014) 62 and “NHTSA's 2014 Automatic Emergency Braking (AEB) Test Track Evaluations” (May 2015), 63 and in accompanying draft CIB and DBS test procedures. 64
62 https://www.regulations.gov, NHTSA 2012–0057–0037.
63 DOT HS 812 166.
64 https://www.regulations.gov, NHTSA 2012–0057–0038.
In 2016, NHTSA published a report identifying the most recurrent AEB-relevant pre-crash scenarios for heavy vehicles. NHTSA identified the three most recurrent situations as a heavy vehicle moving toward a stopped lead vehicle, a heavy vehicle moving toward a slower moving lead vehicle, and a heavy vehicle moving toward a lead vehicle that is decelerating. 65 These were the same three crash scenarios that had been identified as the most prevalent AEB-relevant crash scenarios for light vehicles.
65 Boday, C., et al., “Class 8 Truck-Tractor and Motorcoach Forward Collision Warning and Automatic Emergency Braking Test Track Research—Phase I,” Washington, DC: National Highway Traffic Safety Administration (June 2016). Docket No. NHTSA‐2015–0024–0004.
2. Phase I Testing of Class 8 Truck-Tractors and Motorcoach
In 2016, NHTSA published its first report on track-testing of AEB for heavy vehicles. The previous studies describing the test procedures for light vehicles provided a framework for the establishment of heavy vehicle test procedures. Since test procedures were not yet developed for heavy vehicles, the goal of the research was to first adapt existing testing protocols for light vehicle AEB and then follow these adapted test procedures to quantify the performance of FCW and AEB systems on heavy vehicles. The research was conducted in two phases.
NHTSA's Phase I work began with using a combination of the specific test situations established for NHTSA's NCAP for assessment of FCW and AEB systems and a modified version of the light vehicle test procedures to create heavy vehicle draft research test procedures. NCAP tests involved use of a strikable surrogate vehicle; however, for early heavy vehicle Phase I work, NHTSA used a surrogate lead vehicle comprised of canvas-covered foam to exhibit geometric and reflective features of the rear of a passenger car. The testing for Phase I was performed with four heavy vehicles outfitted with FCW and AEB, including three Class 8 truck-tractors and one Class 8 motorcoach. Specifically, the four Class 8 vehicles were a 2006 Volvo VNL 64T630 6x4 tractor, a 2006 Freightliner Century Class 6x4 tractor, a 2012 Freightliner Cascadia 6x4 tractor, and a 2007 MCI 56-passenger motorcoach (bus). Each vehicle was equipped with ABS, ESC, FCW, and AEB systems. The 2006 and 2012 Freightliners and the MCI motorcoach employed a Meritor WABCO system, and the 2006 Volvo was equipped with a Bendix Wingman Advanced system. In general, the FCW and AEB systems utilized a front bumper mounted sensor to detect objects in front of the vehicle and a display to warn the driver with audio and visual alerts.
For each vehicle, NHTSA planned to run ten tests that are summarized in Table 8. These situations covered the three most common AEB-relevant pre-crash scenarios, as well as two false positive tests and two tests performed at different weighted conditions.
| Scenario | Lead vehicle speed (km/h) | Subject vehicle speed (km/h) | Lightly loaded (number of trials) | Loaded at GVWR (number of trials) |
|---|---|---|---|---|
| Lead vehicle Stopped | 0 | 40 | 10 | |
| Lead Vehicle Moving | 16 | 40 | 10 | 10 |
| Lead Vehicle Moving | 32 | 72 | 10 | 10 |
| Lead Vehicle Decelerating | 40 | 40 | 10 | 10 |
| Lead Vehicle Decelerating | 48 | 48 | 10 | |
| Lead Vehicle Decelerating | 56 | 56 | 5 | 5 |
| Steel Trench Plate False Positive | N/A | 40 | 5 | 5 |
| Steel Trench Plate False Positive | N/A | 72 | 5 | 5 |
The test scenarios were defined by the initial speeds of the subject vehicle and lead vehicle, and the starting headway distance between the vehicle was monitored. For all the tested scenarios, the test driver was instructed to modulate the accelerator pedal to maintain the desired test speed until FCW initiated, upon which the accelerator pedal input was removed. Steering was applied to maintain lateral position test tolerances to the lead vehicle. Manual brake pedal applications were only applied in certain scenarios where AEB was not designed to activate, or an impact occurred with the leading surrogate vehicle. Additionally, the previously described test situations were conducted under both a lightly loaded condition and a fully loaded vehicle weight condition ( i.e., loaded up to the vehicle's GVWR). Based upon potential damage to the subject vehicle, the feasibility of completing each test scenario with the specific load, and the fact that there was no discernable difference between the performance under the lightly loaded and GVWR loaded conditions in the trials executed, some of the speed combinations were not investigated under both loads. The false positive tests were conducted by driving the selected vehicles toward and over a steel trench plate to determine if these commonly used road construction covers would trigger false alerts or unintentional automatic braking.
Stationary lead vehicle testing was limited to the 2006 Volvo, as it was equipped with the only system that would trigger an FCW on stationary vehicles. At the time these evaluations were performed, none of the systems tested were designed to activate AEB on stationary vehicles. During every slower moving lead vehicle test, FCW was activated. Additionally, every vehicle's AEB activated and avoided collision during each slower moving test performed with a subject vehicle speed of 40 km/h, and a lead vehicle speed of 16 km/h.
The lead vehicle decelerating test was used to evaluate all four heavy vehicles, but multiple test adjustments had to be applied. For the lead vehicle decelerating test performed with both the subject and lead vehicle speeds of 40 km/h, the lead vehicle was slowed to 8 km/h instead of a stop to account for the failure of the subject vehicles to activate AEB for stopped vehicles. Once the change was implemented, both the FCW and the AEB systems were activated, and speeds were reduced. Collisions between the subject and lead vehicle did occur, but testing of this scenario mainly led to the observation that the test procedure's headway would also have to be adjusted since heavy vehicles have different braking capabilities than light vehicles.
The steel trench plate false positive test was performed using the 2006 Volvo, 2006 Freightliner, and 2007 MCI at 40 km/h and 72 km/h. 66 For both velocities examined, the 2006 Freightliner and 2007 MCI exhibited no false positives in all five trials. However, the 2006 Volvo triggered unnecessary auditory warnings in all five trials for both velocities. None of the false positive testing trials resulted in AEB system activation.
66 The 2012 Freightliner was not evaluated with steel trench plate scenario due to the short window that the vehicle was available for testing.
During this early testing, the surrogate lead vehicle was towed onto the test track and fixed laterally in the test lane via a low-profile plastic monorail track. Initially, the test system employed a low-stretch rope to pull the surrogate lead vehicle by a tow vehicle. This configuration performed well in the slower moving lead vehicle situation because the lead vehicle moves at a constant velocity, allowing the tow rope to stay in tension. In contrast, when testing the lead vehicle decelerating scenario, the tension in the tow rope was not maintained once the tow vehicle decelerated, and subsequently the tow rope was prone to becoming stuck under the surrogate lead vehicle. This issue resulted in a loss of surrogate lead vehicle lateral stability and consequently decreased the test repeatability.
To address this shortcoming, the foam surrogate lead vehicle was replaced with a vertical cylinder wrapped with a layer of radar reflective material secured to the top of a movable platform with more consistent and stable deceleration properties. However, because the cylinder was not representative of a real vehicle, this was identified as needing further development and modification of the test protocols.
A significant portion of this early AEB testing focused on developing draft research test procedures that could be used to safely and objectively assess AEB performance. The development history of test protocols is important for two reasons. First, it explains how NHTSA came to the conclusion to propose the performance parameters described in the notice and its basis that the performance requirements are objective and practicable. Second, it provides some context as to some of the limitations of early performance evaluations of AEB for heavy vehicles. In general, this initial phase of research demonstrated that the scenarios were generally repeatable and practical, and the tests showed additional development would potentially result in better controlled deceleration and stability of the lead vehicle.
3. Phase II Testing of Class 8 Truck-Tractors
NHTSA's primary objectives of the Phase II efforts were to continue to develop the FCW and AEB test procedures executed in Phase I such that they could be effectively utilized on a closed-course track test to assess performance of heavy vehicle FCW and AEB systems. For this testing, NHTSA used four Class 8, truck-tractors, three of which were from Phase I. The fourth vehicle from Phase I, the MCI motorcoach, was replaced with a 2016 Freightliner. Specifically, these subject vehicles were a 2016 Freightliner, a 2012 Freightliner, a 2006 Volvo, and a 2006 Freightliner. Like in Phase I, all vehicles were outfitted with ABS, ESC, FCW, and AEB systems. Both the 2006 and 2012 Freightliners employed the Meritor WABCO system, the 2016 Freightliner had the Detroit Assurance Safety System, and the 2006 Volvo utilized the Bendix Wingman Advance system. All AEB systems on the selected vehicles utilized radar installed on the front bumper and each AEB system provided auditory and visual alerts. For Phase II testing, NHTSA used the test scenarios from Phase I; however, a second false positive test scenario was added. Specifically, NHTSA investigated a pass-through test from Europe's AEB requirements 67 involving a subject vehicle being driven in a central lane between two parked vehicles.
67 United Nations, “Uniform provisions concerning the approval of motor vehicles with regard to the Advanced Emergency Braking Systems (AEBS)” 2013. Available at https://unece.org/fileadmin/DAM/trans/main/wp29/wp29regs/2013/R131e.pdf (last accessed February 10, 2023).
While other standards 68 were considered for this research study, the use of United States collision data and different testing goals led to establishment of specific test procedures. While vehicle test speeds were similar, with some overlap, NHTSA's test procedures included higher velocity tests to be executed at 55 km/h with more specifications governing the test conditions and test completion. NHTSA's Phase II test scenario matrix is summarized in Table 9.
68 The following were among the standards considered: International Organization for Standardization (ISO) 22839:2013, “Intelligent transport systems—Forward vehicle collision mitigation systems—Operation, performance, and verification requirements; ISO 15623:2013, “Intelligent transport systems—Forward vehicle collision warning systems—Performance requirements and test procedures,” and SAE International recommended practice J3029, “Forward collision warning and mitigation vehicle test procedure—Truck and bus.”
Phase II also further enhanced the testing of Phase I by implementing a new strikable surrogate vehicle (SSV) system as the lead vehicle. The SSV system was created for NHTSA's light vehicle AEB assessment and was engineered to enhance test repeatability and lateral stability in higher velocity tests.
| Scenario | Lead vehicle speed (km/h) | Subject vehicle speed (km/h) | Lightly loaded (number of trials) | Loaded at GVWR (number of trials) |
|---|---|---|---|---|
| Lead Vehicle Stopped | 0 | 40 | 6 | 8 |
| Lead Vehicle Moving | 0 | 40 | 8 | 8 |
| Lead Vehicle Moving | 35 | 75 | 8 | 8 |
| Lead Vehicle Decelerating | 40 | 40 | 8 | 8 |
| Lead Vehicle Decelerating | 55 | 55 | 6 or 8 | 6 or 8 |
| Steel Trench Plate False Positive | N/A | 40 | 8 | 8 |
| Steel Trench Plate False Positive | N/A | 75 | 8 | 8 |
| Stationary Vehicle False Positive | N/A | 50 | 8 | 8 |
The SSV served as the lead vehicle or the vehicle test device (VTD) in the AEB tests. The rear of the SSV was designed to depict features of a typical passenger car. The carbon fiber surrogate exemplified these aspects, considering physical measurements, reflective properties, and visual characteristics. Its structure was not only developed to be detected as a real vehicle by the AEB systems, but it was also intended to endure wind gusts and recurrent impacts up to approximately 40 km/h. The required surrogate test velocities and deceleration of the VTD were achieved by a tow vehicle equipped with a brake controller in conjunction with a towed two-rail track used to move the SSV during the test.
NHTSA implemented changes in the test procedures from Phase I to Phase II. The Phase II test procedures contained more detail as input from within NHTSA and data collected during both phases of heavy vehicle research were used to develop and refine the procedures. For example, the test procedures contained structure for test scenario descriptions, minimum data channels to collect, and general testing requirements ( e.g., ambient temperature range, wind, speed, brake burnish, etc.). Definitions were added for when the initial test conditions started, and more detail was added to the definition of when a test trial ended. The test conditions were established to be on dry, straight roadways in the daylight, based on a previous analysis of crash data and observed safety critical events in field operation testing. FCW activation, AEB activation, collision detection, and accelerator pedal release time were measured in the tests. Similar to Phase I, the testing of each scenario occurred under two different load conditions.
After reviewing the Phase I test outcomes, NHTSA determined that the lead vehicle stopped scenario could only be assessed by the latest model year test vehicle outfitted with a capable AEB system. In Phase II, the subject vehicle traveled 40 km/h and approached a stationary lead vehicle in the same lane. Valid trials required the driver to remain centered in the traveling lane and continue driving at the target velocity until AEB was triggered. Once AEB was triggered, the test driver fully released the accelerator pedal, and the driver was not allowed to use the brake pedal of the test vehicle unless the vehicle collided with the lead vehicle or if the AEB system completely stopped the vehicle. The results showed that FCW was activated, followed by automatic braking by the AEB system in all 8 trials performed under the GVWR condition.
The lead vehicle moving test situation was evaluated at multiple velocity combinations for all four test vehicles. During this test, the subject test vehicle traveled at 40 km/h or 75 km/h and approached a slower-moving lead vehicle traveling at 15 km/h or 35 km/h, respectively, in the same lane. Valid trials required the driver to remain centered in the traveling lane and continue driving at the target velocity until AEB was triggered. Once AEB was triggered, the test driver fully released the accelerator pedal. Testing for this scenario was conducted for both lightly loaded and GVWR conditions. All of the vehicles tested consistently issued FCW alerts and activated the AEB systems; however, impacts occurred.
The lead vehicle decelerating situation was executed with all the test vehicles except the 2006 Volvo due to its Phase I performance. Two initial velocity and initial headway combinations of the subject and lead vehicles were tested ( i.e., 40 km/h and 80 m; 55 km/h and 23 m). After a short period of steady state driving using constant speeds and a constant headway, the lead vehicle was braked at approximately 0.3g while traveling in the same lane as the subject vehicle. The subject vehicle driver kept the subject vehicle centered in the traveling lane and continued driving until AEB was triggered. Under both the lightly loaded and GVWR load conditions testing was completed.
The lead vehicle decelerating test scenario with initial test speeds of 55 km/h and 23 m of headway presented the greatest challenges when compared to other tests. In Phase II, the initial headway was changed from 30.5 m to 23 m to keep the lead vehicle from transitioning to a stopped lead vehicle test scenario near the end of a test trial, as it did in Phase I testing with a headway of 30.5 m. Testing for this scenario was conducted for both lightly loaded and GVWR conditions and all four vehicles. All of the vehicles consistently issued FCW alerts and activated the AEB systems; however, most tests resulted in impact.
Two false positive test types were also conducted. The steel trench plate scenario was executed at 40 km/h and 75 km/h for all test vehicles. Each vehicle was evaluated in the GVWR load condition, but only the 2016 Freightliner was also assessed in the lightly loaded condition. Most of the vehicles did not exhibit any FCW or AEB activations in these tests. However, one vehicle's FCW/AEB system perceived the steel trench plate as a stationary object on the path of travel and the reaction to this false positive detection was not consistent in terms of warning time, brake initiation time, and deceleration level. The second test involved two stationary vehicles in lanes on either side of the test vehicle's travel lane; and only the 2012 Freightliner and the 2016 Freightliner were evaluated under the GVWR load condition. Neither vehicle exhibited any false FCW or AEB activations in this test.
Overall, the Phase II test results demonstrated the ability of the vehicles and AEB systems tested to avoid contact in the lead vehicle stopped and lead vehicle moving test scenarios at the different velocities and achieve no collisions. These capabilities extended to the lead vehicle decelerating tests performed at 40 km/h and a headway of 80 m. In contrast, there was a much lower likelihood of these vehicles avoiding contact with the lead vehicle using an initial speed of 55 km/h and a headway of 23 m.
4. NHTSA's 2018 Heavy Vehicle AEB Testing
NHTSA conducted test track research in 2017 and 2018 on heavy vehicles equipped with FCW and AEB. This section describes the third phase of NHTSA's heavy vehicle testing and the results from three single-unit trucks. These trucks included a class 3 2016 Freightliner 3500 Sprinter, a class 6 2017 International 4300 SBA 4x2, and a class 7 2018 Freightliner M2–106. The main goal of this third phase was to develop objective test procedures for evaluating the performance of heavy vehicles equipped with FCW and AEB systems on a closed course test track.
| Scenario | Lead vehicle speed (km/h) | Subject vehicle speed (km/h) | Initial headway (m) |
|---|---|---|---|
| Lead Vehicle Stopped | 0 | 40 | 55 |
| Lead Vehicle Moving | 15 | 40 | 35 |
| Lead Vehicle Moving | 35 | 75 | 56 |
| Lead Vehicle Decelerating | 40 | 40 | 80 |
| Lead Vehicle Decelerating | 55 | 55 | 23 |
| Steel Trench Plate False Positive | N/A | 40 | 56 |
| Steel Trench Plate False Positive | N/A | 75 | 105 |
| Stationary Vehicle Pass-Through False Positive | N/A | 50 | 60 |
In this third phase of research, the newly developed heavy vehicle AEB test procedures included test conditions where the driver applies the subject vehicle brakes while approaching a lead vehicle, but with an input insufficient to prevent a rear-end crash, to complement the previously developed scenarios.
The 2017 International 4300 was outfitted with a Bendix system which includes FCW and AEB. This system was enhanced since Phase II of NHTSA's research where, in Phase III, it used camera and radar to engage automatic emergency braking and demonstrated the ability to respond to traveling and stationary vehicles. The FCW provided alerts at velocities greater than 8 and 15 km/h for moving and stationary objects, respectively. For the AEB system to be engaged, the vehicle had to travel above 25 km/h.
The 2018 Freightliner M2–106 was outfitted with an OnGuardACTIVE Collision Mitigation system which features FCW and AEB. This system used radar to engage automatic emergency braking and displayed the ability to respond to traveling and stationary vehicles. The FCW provided alerts with visual and auditory cues and a braking warning was issued when the AEB was activated. In order for the AEB system to be engaged, the vehicle had to travel above 25 km/h.
The study concluded that the test procedures were reproducible and appropriate for heavy vehicles outfitted with FCW and AEB systems. After Phase II, the test procedures and scenarios were updated and applied to heavy vehicles with different weight classifications. The inclusion of heavy vehicles with updated AEB systems in Phase III allowed for evaluation of more systems in the lead vehicle stopped scenario; during the lead vehicle stopped evaluations with no driver braking, at least one vehicle experienced no collisions for all trials tested. This showed improvement in comparison to the prior phase, which was only able to test lead vehicle stopped on one vehicle and resulted in multiple collisions. The lead vehicle moving scenario test results also displayed improvement where the percentage of collisions decreased in comparison to Phase II. Overall, the outcomes showed that the FCW/AEB systems have the capacity for being able to decrease rear-end collisions by exhibiting velocity reductions before a collision or avoiding contact with a lead vehicle entirely. While some FCW false positives were observed, the overall results depicted that the systems have the ability to avoid collision on the test track.
The results of this research show that the test procedures are applicable to many heavy vehicles and indicate that performance improvements in heavy vehicles equipped with these safety systems can be objectively measured. 69 Further, this was the first phase of the series that was able to apply the test procedures to single-unit trucks across multiple weight classifications; and new test scenarios were added.
69 Salaani, M.K., Elsasser, D., Boday, C., “NHTSA's 2018 Heavy Vehicle Automatic Emergency Braking Test Track Research Results,” SAE International. J Advances & Current Practices in Mobility 2(3):1685–1704, 2020, doi:10.4271/2020–01–1001.
5. NHTSA's Research Test Track Procedures
NHTSA's most recently published heavy vehicle AEB research test track procedures were published in March 2019 and evaluate AEB performance in crash-imminent scenarios both with and without manual brake pedal applications. 70 These procedures, with some modification, form the basis for the proposed test procedure in this NPRM.
70 Elsasser, D., Salaani, M.K., & Boday, C., “Test track procedures for heavy-vehicle forward collision warning and automatic emergency braking systems,” Report No. DOT HS 812 675, Washington, DC: National Highway Traffic Safety Administration (March 2019). Available at https://rosap.ntl.bts.gov/view/dot/42186/dot_42186_DS1.pdf (last accessed June 28, 2022).
The test procedures were based upon prior research and include the lead vehicle stopped, lead vehicle moving, and lead vehicle decelerating test scenarios, as well as the steel trench plate and stationary vehicles false positive scenarios. The testing was divided into three phases. First, the subject vehicle and the lead vehicle are situated on the test track to the proper location and test velocity. The second stage involves determining whether the vehicles have met the proper starting test conditions to achieve valid and reproducible test outcomes. The third and final stage serves to assess test validity and system performance as well as response to any FCW or AEB triggers. In the research test procedure, if an invalid test is detected, the test is repeated until at least seven valid test attempts are completed. Testing was executed during daylight, avoiding inclement weather and irrelevant obstructions such as overhead signs, bridges, overpasses, etc. For test procedures that include manual brake pedal applications, the pedal was displaced at a rate of 254 mm/s to achieve a target longitudinal acceleration of −3.0 m/s 2 , simulating a manual brake pedal application of a panicked driver. Test procedures for brake pedal input characterization and verification assessment are described for checking uniformity and to ensure the set braking magnitude and response can be achieved.
The lead vehicle stopped test scenario requires the test subject vehicle to be driven toward the stationary lead vehicle at 40 km/h. The subject vehicle is to maintain its velocity and relative lateral position to the straight testing path as it advances toward the lead vehicle. When the time to collision is equal to 5 seconds there is a nominal separation distance of 56 m between the front of the subject vehicle and the rear of the lead vehicle. Once braking is initiated, the accelerator pedal input of the subject vehicle is discontinued fully within 0.5 seconds after the start of braking. For lead vehicle stopped tests performed with insufficient brake pedal applications, the brake pedal is applied at a time to collision of 1.51 seconds. The point at which the brake pedal rate exceeds 50 mm/s is used to define the beginning event of brake pedal input. The conclusion of testing is marked by a collision between the subject and lead vehicle or the subject vehicle stopping prior to colliding with the lead vehicle. The test procedures are repeated until seven valid test trials are obtained for each lead vehicle stopped test with and without brake pedal applications, to obtain a total of 14 valid tests.
The test procedure for the lead vehicle moving scenario is similar for its two vehicle speed combinations. The subject vehicle travels to reach the target speed of 40 or 75 km/h for a minimum of 1 second; and the lead vehicle travels at 15 or 35 km/h, respectively. Prior to approaching the lead vehicle there should be a separation distance of at least 100 m. Additionally, by a time to collision equal to 5 seconds, the separation range is 35 m for 40 km/h and 56 m for 75 km/h. Once the subject vehicle encounters the lead vehicle and braking is automatically initiated, the subject vehicle accelerator pedal was fully released within 0.5 seconds.
The lead vehicle decelerating test procedure starts with the subject vehicle traveling toward the lead vehicle while maintaining an 80 m separation distance. Both the subject vehicle and the lead vehicle are required to reach and maintain a velocity of 40 km/h for at least 1 second while keeping the headway distance. Once the subject vehicle encounters the lead vehicle and braking is initiated, the subject vehicle accelerator pedal was fully released within 0.5 seconds. This test procedure is repeated with similar steps for a 55 km/h velocity and a 23 m separation distance.
In order to evaluate false positives, the steel trench plate test scenario was executed at 40 and 75 km/h, and the stationary vehicles test was completed at 50 km/h. For the seven test trials performed at 40 and 75 km/h, a short edge of the rectangular steel trench plate was centered on the roadway about the x-axis. The subject vehicle was driven toward the steel trench plate such that an initial 110.0 m headway existed, and a nominal velocity of 40 or 75 km/h was maintained for at least 1.0 second. The test initial test condition began when the separation distance between the subject vehicle and steel trench plate was 56 m and 105 m for 40 and 75 km/h, respectively. Once the subject vehicle encountered the steel trench plate at a headway of 16.83 or 40.88 m for 40 and 75 km/h, respectively, the brakes of the subject vehicle were engaged. The test ends when either the subject vehicle drives over the steep trench plate or the subject vehicle stops before crossing over the steel trench plate.
The preliminary conditions of the stationary vehicles test involved two vehicles parked with a lateral separation of 4.5 m. These two vehicles were faced in the forward direction of the test track and were aligned. The subject vehicle was driven along the test track with a 100.0 m headway from the stationary vehicles. The subject vehicle was then driven to maintain a velocity of 50 km/h for at least 1.0 second. The starting test condition is a headway of 60 m where the steering wheel of the subject vehicle was controlled to center the vehicle along the test track. Once the subject vehicle encountered the stationary vehicles at a range of approximately 23.74 m the subject vehicle accelerator pedal was fully released within 0.5 seconds of the initiation of braking.
6. 2021 VRTC Testing
The test track data that follows represents vehicle performance with the latest generation AEB systems and the procedures and conditions proposed in this NPRM largely match the procedures and conditions used for this testing.
2021 Freightliner Cascadia
The 2021 Freightliner Cascadia was tested under the lead vehicle stopped, lead vehicle moving, and lead vehicle decelerating scenarios at the NHTSA VRTC in 2021. The GVT was used as the lead vehicle in these test scenarios. The lead vehicle stopped scenario was executed at multiple initial subject vehicle velocities from 20 km/h up to 95 km/h. While contact with the VTD occurred at 20, 25, 30, and 35 km/h, there were measurable speed reductions. At test velocities between 40 and 85 km/h, no collisions were observed. Collisions also occurred at 90 and 95 km/h, but the FCW at both speeds was issued earlier than 2 seconds before contact. Ten additional test trials were conducted at 40 km/h, and only one trial resulted in contact. Four additional test trials were executed at 50, 60, 70, 80, and 85 km/h; in all four trials, there were no collisions at three speeds and one collision at two speeds ( i.e., 80 and 85 km/h, respectively) which ultimately resulted in a speed reduction when compared to the other trials.
The lead vehicle moving scenario was performed at several combinations of subject vehicle and lead vehicle initial speeds. The first set of eight trials involved the subject vehicle at a range of velocities of 30 km/h to 90 km/h and the initial speed of the lead vehicle was 20 km/h for each. Contact occurred only at the 30 and 60 km/h test velocities. The initial speeds for the subject vehicle and lead vehicle for the second set of eight trials was 40 and 15 km/h, respectively. One of these trials ended in a collision and this run exhibited a notably lower speed reduction when compared to the other trials. The third and fourth sets of trials included subject vehicle and lead vehicle initial velocity combinations of 75 and 35 km/h and 80 and 12 km/h, respectively, and contact was avoided in all trials. For the lead vehicle decelerating scenario collision was avoided for all trials during the 40 km/h test. Impact occurred during four out of five runs in the 50 km/h test with an initial headway of 18 m. However, at the longer headway lengths of 21, 23, 25, and 40 m there were no collisions during the 50 km/h tests. Additionally, contact was avoided for the 80 km/h test with headway lengths of 23, 25, 28, 40, and 45 m.
| Scenario | Lead vehicle speed (km/h) | Subject vehicle speed (km/h) |
|---|---|---|
| Lead Vehicle Stopped | 0 | 20–95 |
| Lead Vehicle Moving | 20 | 30–90 |
| Lead Vehicle Moving | 15 | 40 |
| Lead Vehicle Moving | 35 | 75 |
| Lead Vehicle Moving | 12 | 80 |
| Lead Vehicle Moving | 32 | 80 |
| Lead Vehicle Decelerating | 40 | 40 |
| Lead Vehicle Decelerating | 50 | 50 |
| Lead Vehicle Decelerating | 55 | 55 |
| Lead Vehicle Decelerating | 80 | 80 |
2021 Ram 5500
The class 5 2021 Ram 5500 was tested under the lead vehicle stopped, lead vehicle moving, and lead vehicle decelerating scenarios at the NHTSA VRTC in 2022. The tests performed for these scenarios involved no manual brake application; and the GVT was used as the lead vehicle. For the lead vehicle stopped scenario, the Ram truck avoided collisions at 10, 20, 30, 40 km/h, while impact occurred during two of the five trials in the 50 km/h test, although there was an approximately 80 percent reduction in speed. In general, these results seemed to align with limitations described in the vehicle owner's manual that indicated that the system works up to 50 km/h. Testing up to 80 km/h was not completed to avoid damage to the subject vehicle and test equipment. During the lead vehicle moving scenario, the truck avoided contact at 30, 40, 50, 60, 70, and 80 km/h. Impact did occur at 90 km/h, though there was a speed reduction of 63 percent. At 50 km/h, the lead vehicle decelerating scenario resulted in consecutive impacts with some speed reduction. Due to the repeated collisions, testing was discontinued to prevent damage to the subject vehicle and the GVT.
NHTSA also tested The Ram 5500 under the three scenarios with manual brake application. The lead vehicle stopped scenario resulted in avoidance of contact for all trials at 30, 40, and 60 km/h. Collision did occur at 50 km/h, though there was a speed reduction of approximately 80 percent. The lead vehicle moving scenario resulted in impact avoidance for all 40 to 90 km/h trials, but impact did occur during the 100 km/h test. For the lead vehicle decelerating scenario, impact occurred during the 50 km/h test with an initial headway of 40, 32, and 23 m. Collision also occurred for the 80 km/h test with a headway of 40 m.
| Scenario | Lead vehicle speed (km/h) | Subject vehicle speed (km/h) |
|---|---|---|
| Lead Vehicle Stopped | 0 | 10–60 |
| Lead Vehicle Moving | 20 | 30–100 |
| Lead Vehicle Decelerating | 50 | 50 |
| Lead Vehicle Decelerating | 80 | 80 |
In general, no single vehicle avoided collisions at all speeds in the tested scenarios. While one vehicle may have performed better at lower speeds and the other better at higher speeds, the combination of results from the individual vehicles showed positive results over a range of speeds. Overall, the performance demonstrated that the AEB technology has improved over time, as shown in Tables 13 and 14. 71 72 73 74
71 Phase 1—Boday, C., et al., “Class 8 Truck-Tractor and Motorcoach Forward Collision Warning and Automatic Emergency Braking Test Track Research—Phase I,” Washington, DC: National Highway Traffic Safety Administration (June 2016). Docket No. NHTSA‐2015–0024–0004.
72 Phase II- U.S. DOT/NHTSA- Class 8 Truck- Tractor and Motorcoach Forward Collision Warning and Automatic Emergency Braking System Test Track Research- Draft Report. Docket No. NHTSA–2015–0024–0006.
73 Phase III—Salaani, M.K., Elsasser, D., Boday, C., “NHTSA's 2018 Heavy Vehicle Automatic Emergency Braking Test Track Research Results,” SAE International. J Advances & Current Practices in Mobility 2(3):1685–1704, 2020, doi:10.4271/2020–01–1001.
74 This information is available in the report titled “NHTSA Heavy Vehicle AEB Test Track Performance Data Summary Report—2022,” placed in the docket identified in the heading of this NPRM.
| Class 7–8 heavy vehicle capability | 1st period— introduction | 2nd period—2nd generation (2015) | Current (2022) |
|---|---|---|---|
| FCW and AEB activate for moving vehicles | Yes | Yes | Yes. |
| AEB can avoid contact at test speeds up to 80 km/h in lead vehicle moving scenarios | No | Yes | Yes. |
| AEB can avoid contact at test speeds greater than 80 km/h in lead vehicle moving scenarios | No | N/A | Yes. |
| FCW alerts for stopped vehicles | Yes | Yes | Yes. |
| AEB activates for stopped vehicles | No | Yes | Yes. |
| AEB can avoid contact at test speeds up to 80 km/h in lead vehicle stopped scenarios | No | No | Yes. |
| AEB can avoid contact at test speeds greater than 80 km/h | No | No | Yes. |
| Class 3–6 heavy vehicle AEB capability | Up to 2015 | 2016–2022 |
|---|---|---|
| FCW and AEB activate for moving vehicles | Yes | Yes. |
| AEB can avoid contact at test speeds up to 80 km/h in lead vehicle moving scenarios | No | Yes. |
| AEB can avoid contact at test speeds greater than 80 km/h in lead vehicle moving scenarios | No | Yes. |
| FCW alerts for stopped vehicles | Yes | Yes. |
| AEB activates for stopped vehicles | No | Yes. |
| AEB can avoid contact at test speeds up to 80 km/h in lead vehicle stopped scenarios | No | No. |
| AEB can avoid contact at test speeds greater than 80 km/h | No | No. |
C. NHTSA Field Study of a New Generation Heavy Vehicle AEB System
NHTSA has an ongoing field study with VTTI that aims to collect naturalistic driving data of at least 150 heavy vehicles over a one-year timeframe. The goal is to collect data from each driver participant for a three-month segment of the year. This research has very similar parameters and objectives as those described above for the “Field Study of Heavy-Vehicle Crash Avoidance Systems” study. However, several years have elapsed since the data were collected for the prior study; and the trucks included in this ongoing research project are equipped with newer generation AEB systems, including stationary object braking and system integration into instrument clusters.
The data acquisition systems installed on the heavy vehicles will allow VTTI to sample various system activations including AEB, stationary object alerts and FCWs. The focus of the study's real-world data collection and analysis is to ascertain an understanding of vehicle performance, driver behavior, and driver adaptation. VTTI is evaluating Bendix Commercial Vehicle Systems and Detroit Assurance (Daimler) systems and the five objectives include evaluation of system reliability, assessment of driver performance over time, assessment of overall driving behavior, collection of data on real-world conflicts, and generation of inputs to a safety benefits simulation model.
Preliminary results from the driver survey responses indicate that many drivers agree that collision mitigation technology makes drivers safer. Approximately 50 percent of drivers surveyed at least slightly agree that AEB is beneficial and helps drivers avoid a crash. 75
75 This information is available in a report titled “HV AEB Driver Exit Survey Summary as of August 31, 2022,” which has been placed in the docket for this rulemaking.
V. Need for This Proposed Rule and Guiding Principles
A. Estimating AEB System Effectiveness
In developing this NPRM, NHTSA has examined the effectiveness of AEB, proposing only those amendments that contribute to improved crash safety, and have considered the principles for regulatory decision-making set forth in Executive Order 12866 (as amended), Regulatory Planning and Review.
The effectiveness of AEB indicates the efficacy of the system in avoiding a rear-end crash. This NPRM proposes to require heavy vehicles to have AEB systems that enable the vehicle to completely avoid an imminent rear-end collision under a set of test scenarios. One method of estimating effectiveness would be to perform a statistical analysis of real-world crash data and observe the differences in statistics between heavy vehicles equipped with AEB and those not equipped with AEB. However, this approach is not feasible currently due to the low penetration rate of AEB in the on-road vehicle fleet. Consequently, NHTSA estimated effectiveness of AEB systems using performance data from the agency's vehicle testing. The agency assessed effectiveness against all crash severity levels collectively, rather than for specific crash severity levels ( i.e., minor injury versus fatal).
The performance data derived from four different test vehicles was used to estimate AEB effectiveness, 76 and the agency is continuing its effort to test a larger variety of vehicles to further evaluate AEB system performance. These vehicles were subject to the same test scenarios (stopped lead vehicle, slower-moving lead vehicle, decelerating lead vehicle) that are proposed in this NPRM, and effectiveness estimates are based on each vehicle's capacity to avoid a collision during a test scenario. For example, if a vehicle avoided colliding with a stopped lead vehicle in four out of five test runs, its effectiveness in that scenario would be 80 percent. The test results for each vehicle were combined
76 This information is available in the report titled “NHTSA Heavy Vehicle AEB Test Track Performance Data Summary Report—2022,” placed in the docket identified in the heading of this NPRM.
into an aggregate effectiveness value by vehicle class range and crash scenario, as displayed in Table 15.
| Vehicle class range | Stopped lead vehicle | Slower-moving lead vehicle | Decelerating lead vehicle |
|---|---|---|---|
| 7–8 | 38.5 | 49.2 | 49.2 |
| 3–6 | 43.0 | 47.8 | 47.8 |
As shown in Table 15, after aggregating class 7 and class 8 together, the agency has estimated AEB would avoid 38.5 percent of rear-end crashes for the stopped lead vehicle scenario, and 49.2 percent of slower-moving and decelerating lead vehicle crashes. For class 3–6, AEB is estimated to be 43.0 percent effective against stopped lead vehicle crashes and 47.8 percent against slower-moving and decelerating lead vehicle crashes. These effectiveness values are the values NHTSA used for assessing the benefits of this proposed rule.
B. AEB Performance Over a Range of Speeds Is Necessary and Practicable
The performance requirements proposed in this NPRM are designed around the goal of realizing as much of the safety potential of AEB systems, while remaining realistic and practicable both economically and technically. AEB performance guidelines created outside of the agency's rulemaking process appear not to have been created with these same goals, and thus may not represent the optimal balance of safety and practicability. Several AEB performance tests developed in the private sector are limited to a maximum test speed of around 40 km/h (25 mph), and do not test the capability of AEB system at highway speeds. 77 78
77 IIHS Autonomous Emergency Braking Test Protocol (Version I). Available at https://www.iihs.org/media/a582abfb-7691-4805-81aa-16bbdf622992/REo1sA/Ratings/Protocols/current/test_protocol_aeb.pdf. (last accessed August 5, 2022).
78 SAE International Forward Collision Warning and Mitigation Vehicle Test Procedure—Truck and Bus J3029_201510. (For more details, see https://www.sae.org/standards/content/j3029_201510 ) (last accessed August 5, 2022).
NHTSA considered two primary factors in selecting the proposed test speed ranges. The first factor is the practical ability of AEB technology to consistently operate and avoid contact with a lead vehicle at the widest reasonable range of speeds. A larger range of speeds would likely yield more safety benefits and would more thoroughly test the capabilities of the AEB system. Furthermore, as observed in vehicle testing for NHTSA research, AEB performance during testing at higher speeds does not necessarily indicate what the same system's performance will be at lower speeds. For example, NHTSA's testing of the 2021 Freightliner Cascadia truck showed that the AEB system was able to avoid a collision with the lead vehicle at test speeds of 40 to 85 km/h, but not at speeds below 40 km/h. Thus, testing over a range of speeds is necessary to more fully assess AEB performance. 79
79 This information is available in the report titled “NHTSA Heavy Vehicle AEB Test Track Performance Data Summary Report—2022,” placed in the docket identified in the heading of this NPRM.
The second factor is the practical limit of safely conducting vehicle tests of AEB systems. Test data indicates that AEB performance is less consistent, becoming less likely to avoid a collision when test speeds approach or exceed the proposed upper limits, indicating that testing at higher speeds than proposed would be beyond technological feasibility. 80
80 More detail on test data is discussed in the NHTSA and FMCSA Research and Testing section.
NHTSA's testing must be safe and repeatable as permitted by track conditions and testing equipment. For example, if the AEB system does not intervene as required, or if test parameters inadvertently fall outside of the specified limits, it should be possible to safely abort the test. In the event the subject vehicle does collide with the lead vehicle, it should not injure the testing personnel nor cause excessive property damage. Additionally, test tracks may be constrained by available space and there may be insufficient space to accelerate a heavy vehicle up to a higher speed and still have sufficient space to perform a test. Many types of heavy vehicles are not capable of accelerating as quickly as lighter vehicles and reaching higher test speeds may require longer stretches that exceed available testing facilities. At approximately 100 km/h, the agency found that constraints with available test track length, in conjunction with the time required to accelerate the vehicle to the desired test speed, made performing these higher speed tests with heavy vehicles logistically challenging. 81 The agency has tentatively concluded that at this time the maximum practicable test speed is 100 km/h.
81 During testing of a 2021 Freightliner Cascadia at speeds approaching 100 km/h, NHTSA experienced difficulty establishing valid test conditions due to test facility use restrictions. Facility use restrictions limited where emergency braking tests by heavy vehicles and automated lead vehicle robots could co-operate, thereby reducing the effective useable track length to less than 1100 meters.
The maximum speed of 100 km/h is included in the test speed range when manual braking is present; the manual braking will reduce impact speed if the FCW issues a warning and the AEB system does not activate before reaching the lead vehicle. This would limit potential damage to the test equipment and avoid injury to testing personnel. With no manual braking, the maximum test speed is 80 km/h so that in the event that the AEB system does not provide any braking at all, damage to the subject vehicle and test equipment is reduced and potential injuries avoided.
The stopped lead vehicle test scenario uses a no-manual-braking test speed range of 10–80 km/h and a manual-braking test speed range of 70–100 km/h. Similarly, the slower-moving lead vehicle test scenario uses subject vehicle speed ranges of 40–80 km/h for no manual-braking and 70–100 km/h for manual braking, while the lead vehicle travels ahead at a constant speed of 20 km/h. The lower end of the subject vehicle test speed range is 40 km/h so that the subject vehicle is traveling faster than the lead vehicle. The decelerating lead vehicle tests are run at either 80 or 50 km/h. This latter test is performed at two discreet speeds rather than at ranges of speeds because the main factors that test AEB performance are the variation of headway, or the distance between the subject vehicle and lead vehicle, and how hard the lead vehicle brakes. Also, because these tests contain a larger number of variables requiring more complex test choreography, limiting the test to two discreet test speeds reduces the number of potential test conditions and reduces potential test burden. Together, these test speed ranges provide good coverage of the travel speeds at which heavy vehicle rear-end crashes occur in the real world, while reducing the potential risk and damage to test equipment and vehicles and not exceeding the practical physical size limits of test tracks.
Additionally, the agency is proposing that these requirements would not apply at speeds below 10 km/h. NHTSA believes that there are real-world cases where heavy vehicles are being maneuvered intentionally in proximity of other objects at low-speed, and AEB intervention could be in conflict with the vehicle operator's intention. For example, if an operator intends to drive towards the rear of another vehicle in a parking lot in order to park the vehicle near the other, automatic braking during this parking maneuver would be unwanted. The agency tentatively concluded that excluding speeds below 10 km/h from the AEB requirement would allow these types of low-speed maneuvers. This proposal does not require AEB systems to be disabled below 10 km/h. However, publicly available literature from at least one manufacturer shows that some or all of the AEB system functions are not available below 15 mph (24 km/h), indicating that current manufacturers may have similar considerations about low-speed AEB functionality. 82 A lower bound for FCW and AEB activation speed of 10 km/h is also consistent with the lower bound testing proposed for light vehicle AEB and the Euro NCAP rating program. 83
82 Bendix Wingman Fusion Brochure, or SD–61–4963 Service Data manual for Bendix Wingman Fusion Driver Assistance System. Available at https://www.bendix.com/media/documents/technical_documentsproduct_literature/bulletins/SD-61-4963_US_005.pdf (last accessed August 23, 2022).
83 Euro NCAP Test Protocol—AEB Car-to-Car systems v3.0.3 (April 2021). See https://cdn.euroncap.com/media/62794/euro-ncap-aeb-c2c-test-protocol-v303.pdf.
During each test run in any of the test scenarios, the vehicle test speed will be held constant until the test procedure specifies a change. NHTSA is proposing that vehicle speed would be maintained within a tolerance range of 1.6 km/h of the specified test value. In NHTSA's experience, both the subject vehicle and lead vehicle speeds can be reliably controlled within the 1.6 km/h tolerance range, and speed variation within that range yields consistent test results. A tighter speed tolerance is unnecessary for repeatability and burdensome as it may result in a higher test-rejection rate, without any greater assurance of accuracy of the test track performance.
NHTSA's vehicle testing suggested that the selected speed ranges for the various scenarios are within the capabilities of at least some recent model year AEB-equipped production vehicles. 84 While these current AEB systems perform a bit differently depending on the vehicle, given that this notice proposes a lead time for manufacturers to come into compliance with the proposed performance requirement, the agency expects that future model year performance in accordance with a final rule schedule will be achievable.
84 This information is available in the report titled “NHTSA Heavy Vehicle AEB Test Track Performance Data Summary Report—2022,” placed in the docket identified in the heading of this NPRM.
C. Market Penetration Varies Significantly Among Classes of Heavy Vehicles
Though the presence of AEB in heavy vehicles has increased over the years, many new heavy vehicles sold in the U.S. are not equipped with AEB. Market data obtained by NHTSA indicates that although AEB is likely equipped on the majority of class 8 vehicles and is available on nearly all class 3 and class 4 vehicles, few of class 5 and 6 vehicles come equipped with any type of AEB system. In addition, though the capabilities of these AEB systems have also improved over time, there has been no set of standardized performance metrics in the U.S. that manufacturers could use as a benchmark to meet. This NPRM proposes standard performance metrics that would meet a motor vehicle safety need.
Among the variety of heavy vehicle types, class 7 and 8 truck tractors have been the earliest to voluntarily adopt AEB systems. These vehicles are (with some exceptions) already subject to the electronic stability control requirement in FMVSS No. 136 and contain fewer variations in vehicle type, configuration, and operational pattern. It was estimated that as of 2013 only 8 to 10 percent of class 8 trucks in the U.S. were equipped with this technology. 85 In 2017 a FMCSA report extrapolated available information to estimate that 12.8 percent of the entire on-road fleet of class 8 trucks in the United States were equipped with an AEB system, 86 while the industry estimated that up to 15 percent of class 8 trucks were equipped with AEB. 87 More recently, a survey of public information on AEB availability for heavy vehicles reveals that this technology is becoming more prevalent on new trucks. In 2016, Peterbilt announced the option of AEB in its class 8 model 579 truck tractor, and then made the technology standard in 2019. 88 89 As of 2017, Volvo Trucks made AEB standard equipment on all of its class 8 truck tractor models, as a part of its Volvo Active Driver Assist safety package. 90 While several fleets or manufacturers have made AEB standard, it remains an option for some class 8 vehicles, such as the Peterbilt single-unit truck models 337 and 348. 91 Data from a recent study indicates that the large majority of class 8 vehicles sold from 2018 until mid-2022 had AEB as a standard feature, and that the top ten selling class 8 vehicles all include standard AEB. 92
85 National Transportation Safety Board. 2015. “Special Investigation Report: The Use of Forward Collision Avoidance Systems to Prevent and Mitigate Rear-End Crashes.” Report No. NTSB/SIR–15/01 PB2015–104098. Washington, DC.
86 Grove, K., et al., “Research and Testing to Accelerate Voluntary Adoption of Automatic Emergency Braking (AEB) on Commercial Vehicles,” VTTI (May 2020). Available at https://rosap.ntl.bts.gov/view/dot/49335 (last accessed June 9, 2022).
87 Cannon, J., “Automatic emergency braking is the next generation of driver assist technologies,” Commercial Carrier Journal, December 14, 2017. https://www.ccjdigital.com/business/article/14936178/future-of-automatic-emergency-braking-driver-assist-tech.
88 https://www.peterbilt.com/about/news-events/news-releases/peterbilt-introduces-bendix-wingman-fusion-advanced-safety-system (last accessed August 23, 2022).
89 https://www.peterbilt.com/about/news-events/peterbilt-trucks-introduce-bendix-wingman-fusion-standard (last accessed August 23, 2022).
90 https://www.volvotrucks.us/news-and-stories/press-releases/2017/july/volvo-active-driver-assist-now-standard/#:~:text=Volvo%20Active%20Driver%20Assist%20is%20now%20standard%20equipment,is%20fully%20integrated%20with%20Volvo%E2%80%99s%20Driver%20Information%20Display (last accessed August 23, 2022).
91 https://www.peterbilt.com/about/news-events/peterbilt-announces-bendix-wingman-fusion-medium-duty (last accessed August 23, 2022).
92 This information is available in the S&P Global's presentation titled “MHCV Safety Technology Study,” which has been placed in the docket identified in the heading of this NPRM.
AEB systems are also available on nearly all class 3 and 4 trucks that are relatively similar in size to light trucks, are manufactured by companies that also manufacture light vehicles, and likely have similar component and component suppliers as light vehicles. Although these vehicles are not required to have ESC systems, many of them are also available with ESC, likely because these vehicles are similar in size and use to light trucks. However, while NHTSA has information on ESC and AEB system availability, NHTSA has no information on what percentage of class 3 and 4 vehicle purchases are equipped with ESC and AEB. For classes 5 and 6, there is substantially lower ESC and AEB system availability. However, NHTSA believes that this slower pace of voluntary adoption does not imply that these vehicles are not capable of being deployed with an AEB system. The system components are largely the same and have little to do with a vehicle's size. There are also vehicles within these classes that are available with ESC, and the availability of ESC has increased since NHTSA issued FMVSS No. 136. This market information indicates that AEB is practicable for all vehicles included in this proposal.
D. This NPRM Would Compel Improvements in AEB
This rulemaking is also needed to drive improvements in AEB systems. The performance requirements proposed in this NPRM are designed around the goal of realizing as much of the safety potential of AEB systems as possible, while remaining realistic and practicable. Some contemporary AEB systems are currently designed to detect and mitigate collision with a vehicle ahead when travelling at a wide range of speeds, including interstate speeds. 93 While the systems are also functional at lower speeds, the higher speed capabilities indicate that AEB will be capable of reducing the frequency of interstate rear-end crashes rather than just slower speed events.
93 See https://www.bendix.com/media/documents/technical_documentsproduct_literature/bulletins/SD-61-4963_US_005.pdf (last accessed March 1, 2023).
NHTSA has tentatively concluded that the improvements to AEB systems by manufacturers in the absence of regulation have insufficiently addressed the safety problem associated with rear-end crashes. No individual vehicle's AEB system tested by NHTSA is currently capable of avoiding a collision over the range of test speeds that aligns with the majority of the safety problem. However, the range of speeds included in this proposal is practicable as at least some vehicles were able to achieve the desired results at each tested speed. While manufacturers may continue to improve AEB systems, only a regulation would ensure that all heavy vehicles are equipped with an AEB system that can avoid a collision at a range of speeds that targets the majority of the safety problem. Establishing performance criteria that meet the safety need of preventing fatalities and serious injuries will also ensure that the systems will be designed to address the serious safety problem associated with these crashes. This NPRM proposes that all heavy vehicles be subject to the same performance requirements such that the entire heavy vehicle fleet benefits from improvements in AEB technology.
E. BIL Section 23010(b)(2)(B)
NHTSA is issuing this NPRM in accordance with a statutory mandate in BIL. Section 23010 of BIL requires the Secretary to prescribe a Federal motor vehicle safety standard to require all commercial vehicles subject to FMVSS No. 136 to be equipped with an AEB system. The FMVSS is required to establish performance standards for AEB systems. BIL directs the Secretary to prescribe the standard not later than two years after the date of enactment of the Act.
Section 23010(b)(2)(B) of BIL states that prior to prescribing the FMVSS for heavy vehicle AEB, the Secretary shall consult with representatives of commercial motor vehicle drivers regarding the experiences of drivers with AEB. Prior to this NPRM, NHTSA and FMCSA have engaged drivers and the industry more generally in various ways. NHTSA has published research previously that involved surveying the driving experiences of 18 drivers driving heavy trucks equipped with a prototype FCW system over a 10-month period in May 2011. 94 NHTSA has also been sponsoring studies seeking input of commercial motor vehicle drivers. The current ongoing field study with VTTI aims to collect and analyze performance and operational data on newer generation AEB crash avoidance technologies on new, class 8 tractors by heavy vehicle original equipment manufacturers and their suppliers. One year of naturalistic driving data will be collected by monitoring the production systems used in real-world conditions as deployed by multiple fleets across the United States. In addition to the performance and operational data retrieved from on-board data acquisition systems for evaluation, the study will also involve conducting subjective surveys with drivers and fleet managers regarding performance, satisfaction, and overall acceptance of the crash avoidance technologies.
94 “Integrated Vehicle-Based Safety Systems Heavy-Truck Field Operational Test Independent Evaluation,” DOT HS 811 464.
FMSCA is also engaged consultation with representatives of drivers through the Tech-Celerate Now program. 95 This program intends to accelerate the adoption of advanced crash avoidance technologies by the trucking industry. The first phase initiatives include national outreach and education. The outreach element allowed for the successful creation of training materials for fleets, drivers, and maintenance personnel related to AEB technology. Additionally, the program features other avenues to reach drivers including educational videos on braking, presentations, booth exhibitions, and webinars. As of January 2023, FMCSA has compiled the findings from drivers and/or representatives of drivers in a final report that is currently undergoing internal review. However, planning for the second phase has been initiated and includes expanding the national outreach and education campaign.
95 Tech-Celerate Now. FMCSA. Available at https://www.fmcsa.dot.gov/Tech-CelerateNow (last accessed August 8, 2022).
Building upon this and other research, NHTSA and FMCSA seek comment from representatives of commercial motor vehicle drivers, and from drivers themselves, about their experiences with AEB systems, including whether the AEB system prevented a crash, whether the FCW warnings were helpful, and whether any malfunctions or unwarranted activations occurred. Although members of the public should comment on all aspects of the NPRM they find relevant, NHTSA also request comments on the following specific issues:
• This proposal includes considerations that automatic braking is needed for safety and crash prevention. NHTSA seeks comment from driver experiences with AEB-equipped heavy vehicles on whether AEB improves heavy vehicle rear-end crash safety.
• This proposal includes warning requirements to the driver as part of the AEB system that braking is needed in a rear-end crash-imminent situation. NHTSA seeks comments from driver experiences on whether AEB is helpful in getting a driver's attention back to the task of driving.
• This proposal includes requirements that automatic braking will occur in the event of an imminent collision on a straight testing path. NHTSA seeks comment on driver experiences with the performance of AEB when it is applied on curved roads.
• This proposal includes requirements that automatic braking will be tested under certain weather and roadway pavement conditions. NHTSA seeks comment on driver experiences when AEB is applied at the last moment in all weather conditions.
• This proposal includes considerations that automatic braking is needed because of multiple elements, including driver misjudgments and distractions. NHTSA seeks comment on driver experiences on whether the application of AEB causes drivers to pay less attention to the road; or whether the application of AEB distracts or annoys drivers.
F. Vehicles Excluded From Braking Requirements
The result of this proposal would require AEB and ESC on nearly all heavy vehicles. The only vehicles that would be excluded from AEB and ESC requirements would be vehicles that are already excluded from NHTSA's braking requirements for vehicles equipped with pneumatic brakes in FMVSS No. 121. This braking standard includes requirements for minimum stopping distance. For those vehicles, there is no assurance that their foundational brake systems would have the capability to meet the proposed AEB performance requirements, even if equipped with sensors capable of detecting another vehicle. These vehicles are also presently excluded from FMVSS No. 136 and would continue to be excluded under this proposal. The vehicles excluded from the proposed AEB and ESC requirements are:
• Any vehicle equipped with an air brake system and equipped with an axle that has a gross axle weight rating of 13,154 kilograms (29,000 pounds) or more;
• Any truck or bus that is equipped with an air brake system and that has a speed attainable in 3.2 km (2 miles) of not more than 53 km/h (33 mph);
• Any truck equipped with an air brake system that has a speed attainable in 3.2 km (2 miles) of not more than 72 km/h (45 mph), an unloaded vehicle weight that is not less than 95 percent of its gross vehicle weight rating, and no capacity to carry occupants other than the driver and operating crew.
FMCSA believes that an exemption from its ESC and AEB regulations is appropriate for vehicles involved in driveaway-towaway operations, for example, vehicles that are being transported to dealer locations or that are manufactured exclusively for use outside of the United States. Although these vehicles are operated on public roads in the United States when they are being transported from the point of manufacture to a domestic or foreign destination, these vehicles have not yet entered commercial service. The economic burden associated with requiring these vehicles to be equipped with AEB or ESC for the one-way trip out of the United States would certainly exceed the potential benefits.
The driveaway-towaway exemption would also be applicable to vehicles being delivered to the Armed Forces of the United States. Vehicles operated by the military are exempt from the FMCSRs under §390.3(f)(2). 96
96 FMCSA notes that the driveaway-towaway exemption provided in §393.56 and §393.57 is consistent with exceptions provided by NHTSA. Section 571.7(c) provides an exception for vehicles and items of equipment manufactured for, and sold directly to, the Armed Forces of the United States in conformity with contractual specifications. Section 571.7(d), through a cross-reference to the United States Code, indicates the FMVSSs do not apply to motor vehicles or motor vehicle equipment intended only for export, labeled for export on the vehicle or equipment and on the outside of any container of the vehicle or equipment, and exported (49 U.S.C. 30112(b)(2)).
FMCSA seeks comment on other types of operations for which an exemption from the AEB or ESC requirements may be appropriate. For example, what types of exemptions may be needed for CMVs with auxiliary equipment installed that would interfere with the operation of the AEB system?
VI. Heavy Vehicles Not Currently Subject to ESC Requirements
A. AEB and ESC Are Less Available on These Vehicles
NHTSA is proposing to include nearly all vehicles with a GVWR greater than 4,536 kg (10,000 lbs.). This includes vehicles that are currently exempted from FMVSS No. 136 such as trucks other than truck tractors, school buses, perimeter-seating buses, transit buses, passenger cars, and multipurpose passenger vehicles because about half of the fatalities and serious injuries brought about by heavy vehicles are caused by class 3 through 6 vehicles.
The FMVSSs do not currently require ESC on class 3 through 6 vehicles or on class 7 and 8 single unit trucks, school buses, and certain bus types such as transit buses. ESC has not been commercially available for as long on class 3 through 6 vehicles as it has been for class 7 and 8 vehicles. However, examples can be found of manufacturers who offer ESC as an option on their class 3 through 6 vehicles. Kenworth has made AEB optional for the T880 vocational truck as well as for their T270 and T370 conventional class 6 trucks. Ford made ESC standard on its F–650 model in the 2018 model year and has made AEB optional on model year 2022 F–650 and F–750 class 6 trucks. A number of school bus manufacturers have made ESC standard on certain models, including ones that fall into classes 3 through 6. For example, Thomas Built offers ESC as standard equipment on its type C school buses, which can be configured to be in class 6. In some cases, ESC technology originating in hydraulic-brake passenger cars has moved up into the lower classes of heavy vehicles. For example, the 2019 Mercedes Sprinter, a cargo van which can be configured as a class 3 heavy vehicle, has ESC as standard equipment. Other class 3 and 4 vehicles that resemble light vehicles, such as pickup trucks, are available with ESC.
The availability of ESC as an option across multiple brands and models within class 3 through 6 leads NHTSA tentatively to conclude that providing ESC is technically and economically feasible. NHTSA believes it is reasonable and practicable to require that ESC to be installed on class 3 through 6 vehicles.
B. This NPRM Proposes To Require ESC
NHTSA has tentatively determined that ESC is necessary for safety to include as a foundation for an AEB requirement. Historically, the two technologies have been thought of as supplement or complementary rather joined technologies. That is, while ESC and AEB share hardware fundamental to both technologies, such as brake actuators, ESC is generally not described or advertised as a component of AEB.
That said, despite this theoretical separation, in a survey NHTSA has conducted on the availability of ESC and AEB systems, NHTSA was unable to identify any heavy vehicle that could currently be purchased with an AEB system, other than an FCW-only system ( i.e., not capable of automatic brake application), that did not also have an ESC system. 97 In a 2017 white paper Bendix indicated that collision mitigation technology is built on a foundation of full stability. Bendix stated that as we look to more automated, autonomous functionality in the future, all of this is likely to be built on an ESC foundation as well. 98 In a 2018 news release, Bendix stated that ESC provides the necessary platform for more advanced driver assistance systems (ADAS), including collision mitigation technologies. 99 Manufacturers such as Ford have ESC as a must-have system for installing driver assist technology on the stripped commercial chassis, including AEB. 100 Also, Ford has ESC and AEB as standard equipment on other chassis models such as the E-series models, F–650, and F–750 truck series. Ram Trucks also offers ESC and AEB for Chassis Cab models like RAM 3500 trucks. 101 102 Based upon these factors and its own understanding of the capabilities of AEB and ESC systems, NHTSA has tentatively concluded that there may be safety risks associated with the installation of an AEB system without an ESC system. For example, a driver who responds to an imminent collision by steering to avoid a collision while an AEB system is simultaneously applying braking may induce a lateral instability event that is not addressed by ABS, but that may be prevented with an ESC system. Thus, this NPRM proposes to require both AEB and ESC for the class 3 through 8 vehicles not currently subject to FMVSS No. 136.
97 This information is available in NHTSA's VRTC class 3 to 6 market scan for ESC–FCW–AEB spreadsheet, which has been placed in the docket identified in the heading of this NPRM.
98 Full Stability and the Road Map to The Future- Are we still on the Right Road? https://www.bendix.com/media/documents/products_1/absstability/BW8055_US_000.pdf (last accessed March 3, 2023).
99 October 16, 2018. Bendix News Release, “WORKING TOGETHER, BENDIX AND NORTH AMERICA'S SCHOOL BUS MANUFACTURERS ENHANCE STUDENT TRANSPORTATION SAFETY”.
100 2022 Ford Commercial Vehicles, F–59 Commercial Stripped Chassis. ESC is required for the stripped chassis Driver Assist Technology Package.
101 ESC equipped standard on E-Series models, and F–650/F–750 trucks, available at this link https://www.ford.com/cmslibs/content/dam/vdm_ford/live/en_us/ford/nameplate/f-650-750/2022/brochures/BRO_SUF_130E80EB-C9B2-936F-6F54-72CA6F5472CA.pdf (last viewed March 3, 2023).
102 https://www.ramtrucks.com/gab.html, ESC equipped standard on the RAM Chassis cab models and RAM 3500 trucks, available at this link (last accessed March 3, 2023).
NHTSA requests comment on this tentative conclusion that ESC is necessary to ensure safe AEB operation or whether ESC systems are necessary prerequisites for AEB systems for any other reason. NHTSA further requests comments on specific safety scenarios where ESC systems would be necessary for safe operation of an AEB system.
Currently, pursuant to FMVSS No. 136, only class 7 and 8 truck tractors and certain large buses are required to have ESC systems. FMVSS No. 136 includes both vehicle equipment requirements and performance requirements. This proposal would require nearly all heavy vehicles to have an ESC system that meets the equipment requirements, general system operational capability requirements, and malfunction detection requirements of FMVSS No. 136. The general ESC system operational capability requirements are the nine capabilities that are specified in the definition of ESC system in S4 of FMVSS No. 136, which include a means to augment directional stability and enhance rollover stability by having control over the brake systems individually at each wheel position and the means to control engine torque. However, NHTSA is not proposing test track performance requirements at this time because NHTSA is conscious of the potential testing burden on small businesses and the multi-stage vehicle manufacturers involved in class 3 through 6 vehicle production.
NHTSA's proposed approach would provide vehicle manufacturers the ability to ascertain the ESC system design most appropriate for their vehicles. The approach recognizes that ESC system design is dependent on vehicle dynamics characteristics, such as the total vehicle weight and location of that weight (center of gravity), which would differ depending on the final vehicle configuration. Vehicles not subject to FMVSS No. 136 include a large variety of vehicle configurations, which can result in numerous variations of ESC system design. The approach provides maximum flexibility to vehicle manufacturers to evaluate the characteristics of their vehicles and design an ESC system.
In Europe, ESC was predicted to prevent about 3,000 fatalities (14 percent), and about 50,000 injuries (6 percent) per year. 103 In Europe, ESC has been mandatory for new types of vehicles since 2011, and for all new vehicles is mandatory since 2014. 104 More information about international regulations can be found in Appendix B.
103 Iombiller, S.F., Prado, W.B., Silva M.A. (September 15, 2019). Comparative Analysis between American and European Requirements for Electronic Stability Control (ESC) Focusing on Commercial Vehicles. SAE International.
104 July 31, 2009, Official Journal of the European Union, Regulation (EC) No. 661/2009, Articles 12 & 13, and Annex V.
C. BIL Section 23010(d)
Section 23010 of BIL requires the Secretary to prescribe a Federal motor vehicle safety standard to require any commercial vehicle subject to FMVSS No. 136, that is manufactured after the effective date of an AEB standard, to be equipped with an AEB system that meets established performance standards. In addition, Section 23010(d) of BIL requires NHTSA to study equipping AEB on a variety of commercial motor vehicles not subject to FMVSS No. 136, including an assessment of the feasibility, benefits, and costs associated with installing AEB systems on a variety of newly manufactured commercial motor vehicles with a GVWR greater than 10,000 pounds. Section (d)(3) states that the Secretary shall issue a notice in the Federal Register containing the findings of the study and provide an opportunity for public comment. After completion of this study, the Secretary must determine whether a motor vehicle safety standard would meet the requirements and considerations described in paragraphs (a) and (b) of section 30111 of the Safety Act, and if the Secretary finds that an FMVSS would meet such requirements, initiate a rulemaking to prescribe such an FMVSS.
This NPRM and the accompanying PRIA fulfils the mandate of section 23010(d)(1) concerning a study on equipping commercial vehicles not subject to FMVSS No. 136 with AEB. Pursuant to the mandate section 23010(d)(3) of BIL, NHTSA seeks comment on the tentative conclusions in this NPRM and the PRIA regarding the feasibility, benefits, and costs associated with installing AEB on all heavy vehicles, particularly class 3–6 vehicles and class 7 and 8 single-unit trucks. Further, as part of this rulemaking, the agency has considered whether proceeding with an AEB mandate for these vehicles meet the necessary provisions of the Safety Act, and will continue to do so in any final rule. Finally, although the agency notes that paragraph (d) concerns when the agency would be mandated to initiate a rulemaking to require AEB for these vehicles, that section does not affect the agency's discretionary ability to issue an FMVSS when it believes doing so is compelled by the Safety Act.
D. Multi-Stage Vehicle Manufacturers and Alterers
Heavy vehicles include many specialty or vocational vehicles such as work trucks, delivery box trucks, motorhomes, and school buses, and the complexities within this large variety of special purpose vehicles make installation of ESC and AEB more challenging. These specialized vehicles may be produced in lower volumes with customized features to suit the specific needs of individual customers and in multiple stages by several manufacturers. Concepts and terminology relating to the certification of vehicles built in two or more stages (multi-stage vehicles) and alters are described below.
In the typical situation, a vehicle built in two or more stages is one in which an incomplete vehicle, such as a chassis-cab or cut-away chassis built by one manufacturer, is completed by another manufacturer who adds work-performing or cargo-carrying components to the vehicle. For example, the incomplete vehicle may have a cab, but nothing built on the frame behind the cab. As completed, it may be a dry freight van (box truck), dump truck, tow truck, or plumber's truck. Like all vehicles that are manufactured for sale in the United States, a multi-stage vehicle must be certified as complying with all applicable Federal motor vehicle safety standards (FMVSS) before the vehicle is introduced into interstate commerce.
Manufacturers involved in the production of multi-stage vehicles can include, in addition to the incomplete vehicle manufacturer, one or more intermediate manufacturers, who perform manufacturing operations on the incomplete vehicle after it has left the incomplete vehicle manufacturer's hands, and a final-stage manufacturer who completes the vehicle so that it is capable of performing its intended function.
In some circumstances, a manufacturer at an earlier stage in the chain of production for a multi-stage vehicle can certify that the vehicle will comply with one or more FMVSS when completed, provided specified conditions are met. This allows what is commonly referred to as “pass-through certification.” As long as a subsequent manufacturer meets the conditions of the prior certification, that subsequent manufacturer may rely on this certification and pass it through when certifying the completed vehicle.
NHTSA requests comments on how this proposal may impact multi-stage manufacturers and alterers. The agency seeks comment on the specific challenges that would be faced by the manufacturers in certifying to the proposed AEB or ESC or in altering a vehicle certified to the proposed requirements, and on whether and how NHTSA could revise this proposal to minimize any disproportionate impact.
We believe that small-volume vehicle manufacturers are not likely to certify compliance with the proposed AEB and ESC requirements through their own testing but will use a combination of component testing by brake system suppliers and engineering judgment. Already much of the braking development work, including for ABS and ESC, for these small-volume vehicle manufacturers is done by brake suppliers. That is, small-volume manufacturers already must certify their vehicles to FMVSS Nos. 136, 105, and 121. NHTSA believes that small-volume manufacturers would certify to the proposed ESC and AEB requirements using the means they use now to certify to those braking requirements, which involves collaborating with their brake system suppliers, first and second stage manufacturers, etc. This NPRM would also provide one year after the last applicable date for manufacturer certification of compliance, in accordance with 49 CFR 571.8(b).
NHTSA's regulations governing vehicles manufactured in two or more stages at 49 CFR part 568 require incomplete vehicle manufacturers to provide with each incomplete vehicle an incomplete vehicle document (IVD). This document details, with varying degrees of specificity, the types of future manufacturing contemplated by the incomplete vehicle manufacturer and must provide, for each applicable safety standard, one of the following three statements that a subsequent manufacturer can rely on when certifying compliance of the vehicle, as finally manufactured, to some or all of all applicable FMVSS.
First, the IVD may state, with respect to a particular safety standard, that the vehicle, when completed, will conform to the standard if no alterations are made in identified components of the incomplete vehicle. This representation, which is referred to as a “Type 1 statement,” is most often made with respect to chassis-cabs, since a significant portion of the occupant compartment in incomplete vehicles of that type is already complete.
Second, the IVD may provide a statement of specific conditions of final manufacture under which the completed vehicle will conform to a particular standard or set of standards. This statement, which is referred to as a “Type 2 statement,” is applicable in those instances in which the incomplete vehicle manufacturer has provided all or a portion of the equipment needed to comply with the standard, but subsequent manufacturing might be expected to change the vehicle such that it may not comply with the standard once finally manufactured. For example, the incomplete vehicle could be equipped with a brake system that would, in many instances, enable the vehicle to comply with the applicable brake standard once the vehicle was complete, but that would not enable it to comply if the completed vehicle's weight or center of gravity height were altered from those specified in the IVD.
Third, the IVD may identify those standards for which no representation of conformity is made because conformity with the standard is not substantially affected by the design of the incomplete vehicle. This is referred to as a “Type 3 statement.” A statement of this kind could be made, for example, by a manufacturer of a stripped chassis who may be unable to make any representations about conformity to any crashworthiness standards if the incomplete vehicle does not contain an occupant compartment. When it issued the original set of regulations regarding certification of vehicles built in two or more stages, the agency indicated that it believed final-stage manufacturers would be able to rely on the representations made in the IVDs when certifying the completed vehicle's compliance with all applicable FMVSS.
Although the final-stage manufacturer normally certifies the completed vehicle's compliance with all applicable FMVSS, this responsibility can be assumed by any other manufacturer in the production chain. To take on this responsibility, the other manufacturer must ensure that it is identified as the vehicle manufacturer on the certification label that is permanently affixed to the vehicle. The identified manufacturer also has legal responsibility to provide NHTSA and vehicle owners with notification of any defect related to motor vehicle safety or noncompliance with an FMVSS that is found to exist in the vehicle, and to remedy any such defect or noncompliance without charge to the vehicle's owner.
An altered vehicle is one that is completed and certified in accordance with the agency's regulations and then altered, other than by the addition, substitution, or removal of readily attachable components, such as mirrors or tire and rim assemblies, or by minor finishing operations such as painting, before the first retail sale of the vehicle, in such a manner as may affect the vehicle's compliance with one or more FMVSS or the validity of the vehicle's stated weight ratings or vehicle type classification. The person who performs such operations on a completed vehicle is referred to as a vehicle “alterer.” An alterer must certify that the vehicle remains in compliance with all applicable FMVSS affected by the alteration.
NHTSA seeks comment on the impacts of this NPRM on multi-stage manufacturers and alterers and requests comments on the following questions.
• Are certain multi-stage or altered vehicles manufactured or altered in a manner that makes it impracticable to comply with this proposed rule? If so, please explain which vehicles and why it is impracticable.
• If an incomplete vehicle were equipped with sensors for AEB that could become obstructed by equipment added in later manufacturing steps, how should NHTSA apply an AEB requirement to that vehicle?
• Are there any changes needed to 49 CFR part 567 or part 568 to facilitate certification to the proposed requirements? If so, what would those changes be? Would a final-stage manufacturer be able to certify a vehicle based on the information provided by an intermediate or incomplete vehicle manufacturer, or is additional information needed in IVDs? If additional information is needed, please describe the needed information.
• Are there any requirements in this proposal that ought not to apply to multi-stage vehicles or altered vehicles? Are there proposed requirements that should be lowered in stringency to better enable pass-through certification? Please provide details on those requirements and provide associated rationale.
• Would intermediate manufacturers, final-stage manufacturers, and alterers have sufficient information to identify when an impermissible change has been made? Please explain why or why not.
• Assuming there would be cases where it may not be practical to comply with the proposed requirements, are the existing exemption processes detailed in 49 CFR 555, “Temporary exemption from motor vehicle safety and bumper standards,” sufficient to accommodate unique vehicles, or should NHTSA explicitly consider applicability exclusions for certain multi-stage vehicles? If applicability exclusions are needed, please explain what they include and why the exclusion is needed. For example, should there be exclusions for vehicles with permanently installed work-performing equipment installed on the front of or extending past the front of the vehicle ( e.g., auger trucks, bucket trucks, cable reel trucks, certain car carriers, etc.) or vehicles with a GVWR equal to or greater than 120,000 pounds ( i.e., heavy haulers)?
VII. Proposed Performance Requirements
This NPRM proposes that all heavy vehicles, class 3–8, are subject to the same performance requirements such that the entire heavy vehicle fleet benefits from improvements in AEB technology. The proposed set of requirements would compel AEB technology to operate at its highest safety potential, while at the same time being objective and practicable. In order to establish these requirements, the agency considered the key aspects of the technology and how they would best be applied to address the safety problem. For example, requiring AEB systems to perform only at lower speeds may address a significant portion of the rear-end crash problem, but it would not address the rear-end crash fatalities that mostly occur at higher speeds. Thus, NHTSA is proposing that AEB systems must be capable of activating across a wide spectrum of speeds. Similarly, the agency is aware that some current AEB systems may occasionally cause unwarranted braking events, or “false activations,” which could lead to unwanted consequences; we are thus proposing two test scenarios which vehicles must pass without false activation of the AEB system.
While creating the proposed performance requirements, NHTSA considered the capabilities and limitations of current AEB technologies. Using information from vehicle testing, this proposal includes test scenarios and parameters that the agency found to be within the potential of current production vehicles. This means that at least one vehicle model demonstrated the ability to avoid impacting a lead vehicle, represented by a vehicle test device, or that it so nearly avoided the impact that we expect that the additional development time allowed by this proposal would enable the required improvement in performance.
While certain requirements can be assessed without vehicle tests, a large portion of this proposal has performance requirements that are evaluated through vehicle tests. These tests, discussed in this section, simulate real-world scenarios and are run according to specified conditions and test parameters. NHTSA believes that these test scenarios will realistically evaluate how AEB systems perform while the vehicle is travelling at normal driving speeds.
Several of the vehicle test scenarios test involve multiple moving vehicles. In these test scenarios, the heavy vehicle being evaluated with AEB is referred to as the “subject vehicle.” Other vehicles involved in the test are represented by a vehicle test device. When a vehicle test device is used ahead of the subject vehicle in the same lane, in the path of the moving subject vehicle, it is referred to as a “lead vehicle.” When moving, a lead vehicle moves in the same direction as the subject vehicle. The speeds and relative motions of the subject vehicle and lead vehicle are choreographed in a variety of ways to represent the most common scenarios which lead to heavy vehicle rear-end crashes, and the test procedures measure whether the AEB system is able to avoid impacting the lead vehicle.
The other vehicle tests are two false activation scenarios. A false activation refers to an unwarranted brake activation by the AEB system when there is no object present in the path of the vehicle with which the vehicle would collide. These two test scenarios use objects, including VTDs and a steel trench plate, arranged in realistic ways in or near the travel path but without obstructing the path. In these scenarios, the subject vehicle and AEB system are required to move past these objects without making a substantial automatic application of the service brakes.
This proposal also includes system requirements that are not accompanied by vehicle tests. Vehicles with AEB systems must mitigate collision at speeds beyond the those covered by the track testing, ensuring robustness of the system's range of performance. The AEB system must include a forward collision warning (FCW) system that alerts the vehicle operator of an impending collision with a lead vehicle. Also, the system must indicate an AEB malfunction to the vehicle operator.
A. Proposed Requirements When Approaching a Lead Vehicle
1. Automatic Emergency Brake Application Requirements
The agency is proposing that vehicles be required to have a forward collision warning system and an automatic emergency braking system that are able to function continuously to apply the service brakes automatically when a collision with a vehicle or object is imminent. The system must operate when the vehicle is traveling at any forward speed greater than 10 km/h (6.2 mph). This is a general system equipment requirement with no associated performance test. No specific speed reduction or crash avoidance would be required. However, this requirement is included to ensure that AEB systems are able to function at all times, including at speeds above those NHTSA is proposing as part of the performance test requirements.
This requirement complements the performance requirements in several ways. While the track testing described below provides a representation of real-world crash events, no amount of track testing can fully duplicate the real world. This requirement ensures that the AEB's perception system identifies and automatically detects a vehicle, warns the driver, and applies braking when a collision is imminent. This requirement also ensures that AEB systems continue to function in environments that are not as controlled as the test track environment. For example, unlike during track testing, other vehicles, road users, and buildings may be present within the view of the sensors. Finally, track test equipment limitations and safety considerations limit the ability to test at high speeds. However, crashes still occur at higher travel speeds. Although generally the number of rear-end crashes decreases at higher travel speeds, these high-speed crashes are the ones that more often result in fatalities, as shown in Figure 3. The automatic braking requirement ensures that AEB systems continue to provide safety benefits at speeds above those for which a track-testing requirement is currently not practicable, either because of performance capabilities or track test limitations. Where a performance standard is not practical or does not sufficiently meet the need for safety, NHTSA may specify an equipment requirement as part of an FMVSS. 105
105 See 72 FR 17235, 17299 (Apr. 6, 2007) (discussing the understeer requirement in FMVSS No. 126); Chrysler Corp. v. DOT , 515 F.2d 1053 (6th Cir. 1975) (holding that NHTSA's specification of dimensional requirements for rectangular headlamps constitutes an objective performance standard under the Safety Act).
BILLING CODE 4910–59–P
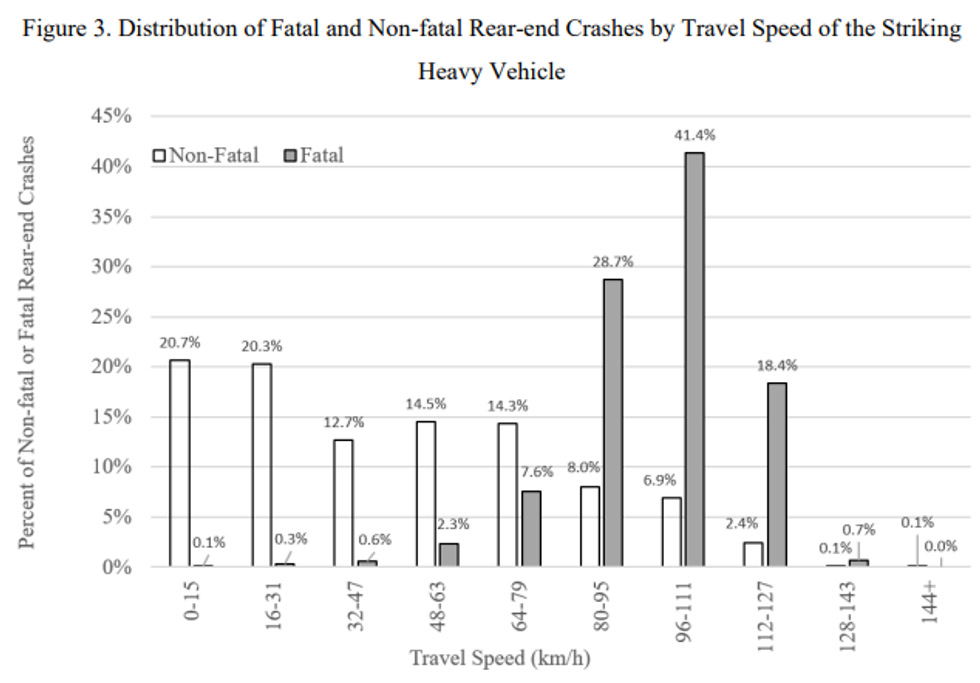
BILLING CODE 4910–59–C
These requirements would not apply at speeds below 10 km/h. NHTSA believes that there are real-world cases where heavy vehicles are being maneuvered at low-speed and intentionally in proximity of other objects, and AEB intervention could be in conflict with the vehicle operator's intention. For example, if an operator intends to drive towards the rear of another vehicle in a parking lot in order to park the vehicle near the other, automatic braking during this parking maneuver would be unwanted. Publicly available literature from at least one AEB manufacturer shows that some or all of the AEB system functions are not available below 15 mph (24 km/h), indicating that current manufacturers may have similar considerations about low-speed AEB functionality. 106 NHTSA tentatively concludes that a minimum operational speed of 10 km/h would allow these types of low-speed maneuvers. This proposal would not require AEB systems to be disabled below 10 km/h.
106 SD–61–4963 Bendix Wingman Fusion Driver Assistance System Brochure, available at https://www.bendix.com/media/documents/technical_documentsproduct_literature/bulletins/SD-61-4963_US_005.pdf (last accessed June 21, 2023).
Enforcement of such a performance requirement can be based on evidence obtained by engineering investigation that might include a post-crash investigation and/or system design investigation. For instance, if a crash occurs in which the vehicle under examination has collided with a lead vehicle, NHTSA could investigate the details surrounding the crash to determine if a warning was provided and the automatic emergency braking system applied the service brakes automatically. In appropriate cases in the context of an enforcement proceeding, NHTSA could also use its information-gathering authority to obtain information from a manufacturer on the basis for its certification that its FCW and AEB systems meet this proposed requirement.
2. Forward Collision Warning Requirement
NHTSA is proposing that AEB-equipped vehicles must have forward collision warning functionality that provides a warning to the vehicle operator if a forward collision with a lead vehicle is imminent. The proposal defines FCW as an auditory and visual warning provided to the vehicle operator that is designed to elicit an immediate crash avoidance response by the vehicle operator. The system must operate when the vehicle is traveling at any forward speed greater than 10 km/h (6.2 mph).
While some vehicles are equipped with alerts that precede the FCW and research has examined their use, NHTSA's proposal is not specifying an advisory or preliminary alert that would precede the FCW. Lerner, Kotwal, Lyons, and Gardner-Bonneau (1996b) differentiated between an imminent alert, which “requires an immediate corrective action” and a cautionary alert, which “alerts the operator to a situation which requires immediate attention and may require a corrective action.” 107 A 2004 NHTSA report titled “Safety Vehicles using adaptive Interface Technology (Task 9): A Literature Review of Safety Warning Countermeasures,” examined the question of whether to include a cautionary alert level in an FCW system. Although the two FCW algorithms in the Automotive Collision Avoidance System Field Operational Test algorithms included a cautionary phase, the Collision Avoidance Metrics Partnership (1999) program recommended that only single (imminent) stage warnings be used.
107 Lerner, Kotwal, Lyons, and Gardner-Bonneau (1996). Preliminary Human Factors Guidelines for Crash Avoidance Warning Devices. DOT HS 808 342. National Highway Traffic Safety Administration.
Unlike the FCW required as part of the track testing, NHTSA is not specifically requiring that FCW presentation occur prior to the onset of braking in instances that are not tested on the track. This is to provide manufacturers with the flexibility to design systems that are most appropriate for the complexities of various crash situations, some of which may provide very little time for a driver to take action to avoid a crash. A requirement that FCW occur prior to automatic braking could suppress the automatic braking function in some actual driving scenarios, such as a lead vehicle cutting immediately in front of an AEB-equipped vehicle, where immediate automatic braking should not wait for a driver warning.
i. FCW Modalities
Since approximately 1994, NHTSA has completed research and published related reports for more than 35 research efforts related to crash avoidance warnings or forward collision warnings. These research efforts, along with other published research and existing ISO standards (15623 and 22839) and SAE International (SAE) documents (J3029 and J2400) provide a basis for the proposed requirements. 108
108 ISO 15623—Forward vehicle collision warning systems—Performance requirements and test procedures; ISO 22839—Forward vehicle collision mitigation systems—Operation, performance, and verification requirements (applies to light and heavy vehicles); SAE J3029: Forward Collision Warning and Mitigation Vehicle Test Procedure and Minimum Performance Requirements—Truck and Bus (2015–10; WIP currently); SAE J2400 2003–08 (Information report). Human Factors in Forward Collision Warning Systems: Operating Characteristics and User Interface Requirements.
NHTSA NCAP and Euro NCAP information relating to FCW was also considered. Since model year 2011, the agency has included FCW as a recommended technology in NCAP and identifies to consumers which light vehicles have FCW systems that meet NCAP's performance tests. NHTSA's March 2022 request for comments notice on proposed changes to NCAP sought comment on which FCW modalities or modality combinations should be necessary to receive NHTSA's NCAP recommendation. 109 Commenters generally supported the use of a multimodal FCW strategy. The Alliance for Automotive Innovation and Intel both advocated allowing credit for any effective FCW signal type. Multiple commenters supported allowing NCAP credit for FCW having either auditory or haptic signals. BMW and Stellantis supported use of FCW auditory or haptic signals in addition to a visual signal. NTSB and Advocates for Highway and Auto Safety recommended that NHTSA conduct research examining the human-machine interface and examine the effectiveness of haptic warning signals presented in different locations ( e.g., seat belt, seat pan, brake pulse). Dynamic Research, Inc. advocated allowing NCAP credit for implementation of a FCW haptic brake pulse, while ZF supported use of a haptic signal presented via the seat belt. Bosch warned that use of a haptic signal presented via the steering wheel for lane keeping or blind spot warning and FCW should be avoided as it may confuse the driver. The Alliance for Automotive Innovation raised the potential benefits of standardizing the warning characteristics to improve effectiveness as individuals move from vehicle to vehicle.
109 87 FR 13452 (Mar. 9, 2022).
All current U.S. vehicle models with FCW systems appear to provide auditory and visual FCW signals, while only a few manufacturers also provide a haptic signal ( e.g., seat pan vibration or a brake pulse). Visual FCW signals in current models consist of either a symbol or word ( e.g., “BRAKE!”), presented on the instrument panel or head-up display, and most are red.
For this NPRM, NHTSA proposes that the FCW be presented to the vehicle operator via at least two sensory modalities, auditory and visual. Use of a multimodal warning ensures that most drivers will perceive the warning as soon as its presented, allowing the most time for the driver to take evasive action to avoid a crash. As a vehicle operator who is not looking toward the location of a visual warning at the time it is presented may not see it, NHTSA's proposal views the auditory warning signal as the primary modality and the visual signal as a secondary, confirmatory indication that explains to the driver what the warning was intended to communicate ( i.e., a forward crash-imminent situation). However, because hearing-impaired drivers may not perceive an FCW auditory signal, a visual signal is important for presenting the FCW to hearing-impaired individuals.
A multimodal FCW strategy is consistent with recommendations of multiple U.S. and international organizations including ISO, SAE International, and Euro NCAP. ISO recommends a multimodal approach in both ISO 15623, “Forward vehicle collision warning systems—Performance requirements and test procedures” and ISO 22839, “Forward vehicle collision mitigation systems—Operation, performance, and verification requirements” (which applies to light and heavy vehicles). SAE addresses the topic of a multimodal FCW strategy in both information report J2400 2003–08, “Human Factors in Forward Collision Warning Systems: Operating Characteristics and User Interface Requirements,” and J3029, “Forward Collision Warning and Mitigation Vehicle Test Procedure and Minimum Performance Requirements—Truck and Bus (2015–10; Work in Progress currently).” Most of these recommendations specify an FCW consisting of auditory and visual signals, while ISO 15623 specifies that an FCW include a visual warning, as well as an auditory or haptic signal.
ii. FCW Auditory Signal Characteristics
The proposed FCW auditory signal would be the primary means used to direct the vehicle operator's attention to the forward roadway and should be designed to be conspicuous to quickly capture the driver's attention, convey a high level of urgency, and be discriminable from other auditory signals presented within the vehicle. 110 Some specifications from NHTSA's “Human Factors Design Guidance For Driver—Vehicle Interfaces” are proposed as forward collision warning specifications to meet these criteria. 111 As the FCW auditory signal would be the primary warning mode, this signal would not be permitted to be disabled.
110 DOT HS 810 697, Crash Warning System Interfaces: Human Factors Insights and Lessons Learned—Final Report.
111 Campbell, J.L., Brown. J.L., Graving, J.S., Richard, C.M., Lichty, M.G., Sanquist, T., . . . & Morgan, J.L. (2016, December). Human factors design guidance for driver-vehicle interfaces (Report No. DOT HS 812 360). Washington, DC: National Highway Traffic Safety Administration.
To be conspicuous and quickly capture the driver's attention, the FCW auditory signal must ensure that the driver will readily detect the warning under typical driving conditions ( e.g., ambient noise). The auditory signal must be clearly perceptible and quickly focus the driver's attention on the forward roadway. To ensure that the FCW auditory signal is conspicuous to the vehicle operator, any in-vehicle system or device that produces sound that may conflict with the FCW presentation would be required to be muted, or substantially reduced in volume, during the presentation of the FCW. 112 In order for the warning to be detectable, a minimum intensity of 15–30 dB above the masked threshold (MT) should be used. 113 114 115 116 Because sound levels inside a vehicle can vary based on any number of different factors, such as vehicle speed and pavement condition, NHTSA is not proposing a specific sound level at this time, but requests comments on suitable and reasonable approaches for ensuring that the FCW auditory signal can be detected by drivers under typical driving conditions.
112 DOT HS 810 697, Crash Warning System Interfaces: Human Factors Insights and Lessons Learned—Final Report.
113 Campbell, J.L., Brown. J.L., Graving, J.S., Richard, C.M., Lichty, M.G., Sanquist, T., . . . & Morgan, J.L. (2016, December). Human factors design guidance for driver-vehicle interfaces (Report No. DOT HS 812 360). Washington, DC: National Highway Traffic Safety Administration. “The amplitude of auditory signals is in the range of 10–30 dB above the masked threshold (MT), with a recommended minimum level of 15 dB above the MT ( e.g., [1, 2, 3]). Alternatively, the signal is at least 15 dB above the ambient noise [3].”
114 Campbell, J.L., Richman, J.B., Carney, C., and Lee, J.D. (2002). In-vehicle display icons and other information elements. Task F: Final in-vehicle symbol guidelines (FHWA–RD–03–065). Washington, DC: Federal Highway Administration.
115 International Organization for Standardization. (2005). Road vehicles—Ergonomic aspects of in-vehicle presentation for transport information and control systems—Warning systems (ISO/TR 16532). Geneva, Switzerland: International Organization of Standards.
116 MIL–STD–1472F. (1998). Human engineering. Washington, DC: Department of Defense.
For communicating urgency and ensuring comprehension of auditory messages, fundamental frequency, the lowest frequency in a periodic signal, is a key design parameter. 117 Research has shown that auditory warning signals with a high fundamental frequency of at least 800 Hz more effectively communicate urgency. 118 119 Greater perceived urgency of a warning is associated with faster reaction times, which would mean a quicker crash avoidance response by the driver. 120 121 122 Therefore, NHTSA proposes that the FCW auditory signal's fundamental frequency must be at least 800 Hz. 123 Additional proposed FCW auditory signal requirements that support communication of the urgency of the situation include a duty cycle, 124 or percentage of time sound is present, of 0.25–0.95, and faster auditory signals with a tempo in the range of 6–12 pulses per second to be perceived as urgent and elicit rapid driver response. 125
117 Campbell, J.L., Brown. J.L., Graving, J.S., Richard, C.M., Lichty, M.G., Sanquist, T., . . . & Morgan, J.L. (2016, December). Human factors design guidance for driver-vehicle interfaces (Report No. DOT HS 812 360). Washington, DC: National Highway Traffic Safety Administration.
118 Campbell, J.L., Brown. J.L., Graving, J.S., Richard, C.M., Lichty, M.G., Sanquist, T., . . . & Morgan, J.L. (2016, December). Human factors design guidance for driver-vehicle interfaces (Report No. DOT HS 812 360). Washington, DC: National Highway Traffic Safety Administration.
119 Guilluame, A., Drake, C., Rivenez, M., Pellieux, L., & Chastres, V. (2002). Perception of urgency and alarm design. Proceedings of the 8th International Conference on Auditory Display.
120 Campbell, J.L., Brown. J.L., Graving, J.S., Richard, C.M., Lichty, M.G., Sanquist, T., . . . & Morgan, J.L. (2016, December). Human factors design guidance for driver-vehicle interfaces (Report No. DOT HS 812 360). Washington, DC: National Highway Traffic Safety Administration.
121 Campbell, J.L., Richman, J.B., Carney, C., & Lee, J.D. (2004). In-vehicle display icons and other information elements, Volume I: Guidelines (Report No. FHWA–RD–03–065). Washington, DC: Federal Highway Administration. Available at www.fhwa.dot.gov/publications/research/safety/03065/index.cfm.
122 Suied, C., Susini, P., & McAdams, S. (2008). Evaluating warning sound urgency with reaction times. Journal of Experimental Psychology: Applied, 14(3), 201–212.
123 Campbell, J.L., Brown. J.L., Graving, J.S., Richard, C.M., Lichty, M.G., Sanquist, T., . . . & Morgan, J.L. (2016, December). Human factors design guidance for driver-vehicle interfaces (Report No. DOT HS 812 360). Washington, DC: National Highway Traffic Safety Administration.
124 Duty cycle, or percentage of time sound is present, is equal to the total pulse duration divided by the sum of the total pulse duration and the sum of the inter-pulse intervals.
125 Gonzalez, C., Lewis, B.A., Roberts, D.M., Pratt, S.M., & Baldwin, C.L. (2012). Perceived urgency and annoyance of auditory alerts in a driving context. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 56(1), 1684–1687.
The FCW auditory signal needs to be easily discriminable from other auditory signals in the vehicle. Therefore, vehicles equipped with more than one crash warning type should use FCW auditory signals that are distinguishable from other warnings. 126 This proposed requirement is consistent with ISO 15623 5.5.2.6. 127 Standardization of FCW auditory signals would likely be beneficial in ensuring driver comprehension of the warning condition across vehicle makes and models. NHTSA invites comments on the feasibility of specifying a common FCW auditory signal. While this proposal contains no specific requirements ensuring that the FCW auditory signal is distinguishable from other auditory warnings in the vehicles, NHTSA believes that industry is likely to consider this in their vehicle designs as part of their due diligence and safety assurance.
126 DOT HS 810 697, Crash Warning System Interfaces: Human Factors Insights and Lessons Learned—Final Report.
127 ISO 15623—Forward vehicle collision warning systems—Performance requirements and test procedures.
iii. FCW Visual Signal Characteristics
Current FCWs in the U.S. vehicle fleet use a mix of symbols and words as a visual forward collision warning. Use of a common FCW symbol across makes and models would help to improve consumer understanding of the meaning of FCWs and encourage more appropriate driver responses in forward crash-imminent situations.
ISO 7000, “Graphical symbols for use on equipment—Registered symbols” 128 and the SAE J2400 (2003–08) 129 information report, “Human Factors in Forward Collision Warning Systems: Operating Characteristics and User Interface Requirements,” contain recommended FCW symbols shown in Figure 4. These symbols are similar as they both communicate a forward impact, while the ISO symbol portrays the forward impact as being specifically with another vehicle.
128 ISO 7000—Graphical symbols for use on equipment—Registered symbols.
129 SAE J2400 (info. report, not RP or standard), 2003–08. Human Factors in Forward Collision Warning Systems: Operating Characteristics and User Interface Requirements.
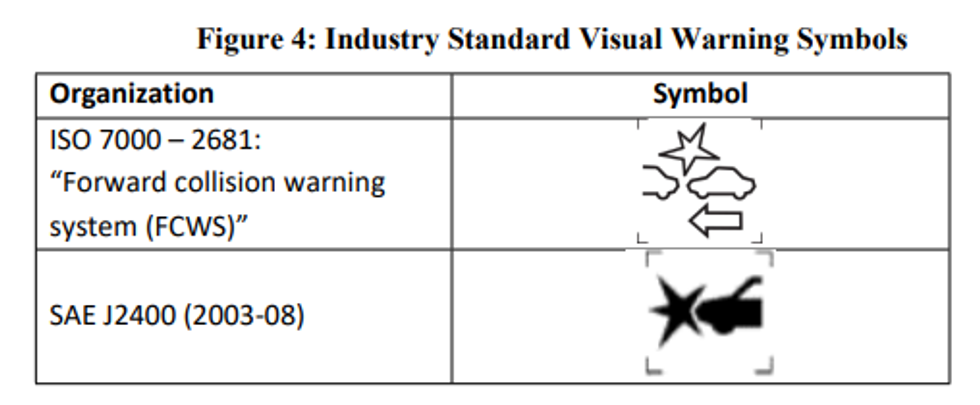
Because the symbol in SAE J2400 relates the idea of a frontal crash without depicting a particular forward object, this symbol could visually represent and apply to scenarios when approaching a lead vehicle but also scenarios approaching pedestrians or other objects which may be relevant to AEB systems. To prevent different vehicle types from having different FCW alerts, NHTSA proposes the same FCW characteristics and reasoning in both the light vehicle NPRM and this NPRM. Therefore, NHTSA has taken account of considerations for pedestrian scenarios, because the light vehicle proposed rule contains a requirement that FCW and AEB systems function in the case of an imminent collision with a pedestrian. NHTSA finds the SAE J2400 symbol to be most applicable to the FCW requirements in this proposal. NHTSA proposes that FCW visual signals using a symbol must use the SAE J2400 (2003–08) symbol.
Some other vehicle models employ a word-based visual warning, such as “STOP!” or “BRAKE!” SAE J2400 also includes a word-based visual warning recommendation consisting of the word, “WARNING.” A well-designed warning should instruct people about what to do or what not to do to avoid a hazard. The potential benefit of a word-based warning for FCW is that it can communicate to the driver an instruction about what to do to avoid or mitigate the crash, thereby expediting the driver's initiation of an appropriate crash avoidance response. However, Consumer Reports noted in its online “Guide to forward collision warning” that for some models, visual warning word use was found to be confusing to some drivers surveyed. 130 Respondents reported a common complaint that “their vehicle would issue a visual “BRAKE” alert on the dash, but it wouldn't bring the car to a stop . . .” This confusion as to whether the word is meant to communicate what the driver should do or what the vehicle is doing may stem from drivers assuming that any information presented within the instrument panel area is communicating something relating to the vehicle's condition or state, as symbols presented in that location generally do. Presenting a word-based warning in a higher location away from the instrument panel, as recommended by SAE J2400, may be interpreted more accurately by drivers as well as increase the likelihood of FCW visual warning perception by drivers. 131 NHTSA requests comments on this issue and any available objective research data that relates to the effectiveness of word-based FCW visual signals in instrument panel versus head-up display locations. NHTSA also requests comments regarding whether permitting word-based warnings that are customizable in terms of language settings is necessary to ensure warning comprehension by all drivers.
130 “Guide to forward collision warning: How FCW helps drivers avoid accidents.” Consumer Reports. https://www.consumerreports.org/car-safety/forward-collision-warning-guide/ (last accessed April 2022).
131 SAE J2400 2003–08 (Information report). Human Factors in Forward Collision Warning Systems: Operating Characteristics and User Interface Requirements.
One plausible benefit of a word-based visual warning is that some word choices that instruct the driver to initiate a particular action, such as “STOP!,” would be fully applicable to lead vehicles and other obstacles or pedestrians, whereas a symbol containing an image of a lead vehicle would not be directly applicable to other crash-imminent scenarios. Although this NPRM does not propose requiring pedestrian AEB, NHTSA believes the warning should not be directed specifically at lead vehicle AEB. As the response desired from the driver, to apply the brakes, the content of the visual warning need not be specific to the type of forward obstacle, but needs simply to communicate the idea of an impending forward crash. NHTSA requests comments and any available research data regarding the use and effectiveness of obstacle-specific symbols and word-based visual warnings and the relative effectiveness of word-based visual warnings compared to symbols.
While many current vehicle models present a visual FCW signal within the instrument panel, drawing a driver's eyes downward away from the roadway to the instrument panel during a forward crash-imminent situation is likely to have a negative impact on the effectiveness of the driver's response to the FCW. Research indicates that a visual FCW signal presented in the instrument panel can slow driver response. 132 The research findings support the SAE J2400 recommendation advising against the use of instrument panel based visual FCWs. 133 SAE J2400 (2003–08) states:
132 “Evaluation of Forward Collision Warning System Visual Alert Candidates and SAE J2400,” SAE Paper No. 2009–01–0547, https://trid.trb.org/view/1430473.
133 SAE J2400 2003–08 (Information report). Human Factors in Forward Collision Warning Systems: Operating Characteristics and User Interface Requirements.
Visual warnings shall be located within a 10-degree cone of the driver's line of sight. Qualitatively, this generally implies a top-of-dashboard or head-up display location. A conventional dashboard location shall not be used for the visual warning. The rationale for this is based on the possibility that an instrument panel-based visual warning may distract the driver from the hazard ahead.
This FCW visual signal location guidance is also consistent with ISO 15623, which states that the FCW visual signal shall be presented in the “main glance direction.” Current vehicles equipped with head-up displays have the ability to present a FCW visual signal within the driver's forward field of view. Furthermore, some GM vehicles not equipped with head-up displays currently have the ability to present a FCW visual signal reflected onto the windshield in the driver's forward line-of-sight. Despite the FCW visual signal being considered secondary to the auditory signal, NHTSA agrees that the effectiveness of a FCW visual signal would be maximized for both hearing and hearing-impaired drivers if the signal is presented at a location within the driver's forward field of view above the instrument panel. To ensure maximum conspicuity of the FCW visual signal (be it word-based or a symbol), NHTSA proposes that it be presented within a 10-degree cone of the driver's line of sight. The line of sight would be based on the forward-looking eye midpoint (M f ) as described in FMVSS No. 111, “Rear visibility,” S14.1.5.
The FCW visual signal would be required to be red as is generally used to communicate a dangerous condition and as recommended by ISO 15623 and SAE J2400 (2003–08). Because the FCW visual signal is intended to be confirmatory for the majority of drivers, the symbol would be required to be steady burning.
iv. FCW Haptic Signal Discussion
NHTSA considered also specifying a complementary haptic FCW signal as part of the proposed FCW specifications. Currently, only a portion of U.S. vehicles equipped with forward collision warning include a haptic warning component. For example, General Motors vehicles equipped with the haptic warning feature can present either a haptic seat pulse (vibration) or auditory warning based on a driver-selectable setting. Some other vehicle manufacturers, such as Stellantis and Audi, use a brake pulse, or brief deceleration of the vehicle, as part of the FCW. Some Hyundai/Kia models incorporate a haptic steering wheel vibration into the FCW. As haptic steering wheel signals are used by many lane keeping features of current vehicles to encourage drivers to steer the vehicle back toward the center of the lane, providing a haptic FCW signal via the steering wheel may result in driver confusion and be less effective in eliciting a timely and beneficial driver response.
ISO 15623 allows a haptic signal as an alternative to an auditory signal. 134 It permits a haptic brake pulse warning with a duration of less than 1 second when the driver is not already applying the brakes. ISO 15623 also allows actuation of a seat belt pretensioner as a haptic FCW signal.
134 ISO 15623—Forward vehicle collision warning systems—Performance requirements and test procedures.
Some research has shown that haptic FCW signals can improve crash avoidance response. NHTSA research on “Driver-Vehicle Interfaces for Advanced Crash Warning Systems” found that a haptic signal delivered via the seat belt pretensioner would be beneficial in eliciting an effective crash avoidance response from the vehicle operator. The research showed for FCWs issued at 2.1-s time to collision (TTC) that seat belt pretensioner-based FCW signals elicited the most effective crash avoidance performance. 135 Haptic FCW signals led to faster driver response times than did auditory tonal signals. FCW modality had a significant effect on participant reaction times and on the speed reductions resulting from participants' avoidance maneuvers (regardless of whether a collision ultimately occurred). Brake pulsing or seat belt tensioning were found to be effective for returning distracted drivers' attention to the forward roadway and eliciting desirable vehicle control responses; seat vibration similar to a virtual rumble strip (vibrating the front of the seat) was not found to rapidly and reliably return driver attention to the forward roadway within the research. Similarly, research by Aust (2014) found that “combining sound with seat belt jerks or a brake pulse leads to significantly faster response times than combining the sound with a visual warning” and stated, “these results suggest that future FCWs should include a haptic modality to improve driver performance.” 136 Aust (2014) also found use of a haptic seat belt FCW signal to be slightly more effective (100 ms faster driver response) than a haptic brake pulse in one of two scenarios (response times were equal in a second scenario). Despite these promising research results associated with use of a seat belt based FCW haptic component, NHTSA was unable to identify any current U.S. vehicle models equipped with a haptic seat belt FCW component.
135 Lerner, N., Singer, J., Huey, R., Brown, T., Marshall, D., Chrysler, S., . . . & Chiang, D.P. (2015, November). Driver-vehicle interfaces for advanced crash warning systems: Research on evaluation methods and warning signals. (Report No. DOT HS 812 208). Washington, DC: National Highway Traffic Safety Administration.
136 Aust, M. (2014) Effects of Haptic Versus Visual Modalities When Combined With Sound in Forward Collision Warnings. Driving Simulation Conference 2014, Paper number 36. Paris, France, September 4–5, 2014.
Other studies found FCW haptic brake pulses effective at getting a driver's attention and that drivers are more likely to detect a brake pulse if it produces a sensation of “jerk” or “self-motion.” 137 138 Kolke reported reaction times shortened by one-third (approximately 0.3 s, non-significant) when a brake pulse was added to an audio-visual warning. 139 One usability drawback is that drivers tend to report that vehicle brake pulses are too disruptive, which can lead to unfavorable annoyance. 140
137 Lee, J.D., McGehee, D.V., Brown, T.L., & Nakamoto, J. (2012). Driver sensitivity to brake pulse duration and magnitude. Ergonomics, 50(6), 828–836.
138 Brown, S.B., Lee, S.E., Perez, M.A., Doerzaph, Z.R., Neale, V.L., & Dingus, T.A. (2005). Effects of haptic brake pulse warnings on driver behavior during an intersection approach. Proceedings of the Human Factors and Ergonomics Society 49th Annual Meeting, 1892–1896.
139 Kolke, Gauss, and Silvestro (2012). Accident reduction through emergency braking systems in passenger cars. Presentation at the 8th ADAC/BASt-Symposium “Driving Safely in Europe.” October 5, 2012, Workshop B.
140 Campbell, J.L., Brown. J.L., Graving, J.S., Richard, C.M., Lichty, M.G., Sanquist, T., . . . & Morgan, J.L. (2016, December). Human factors design guidance for driver-vehicle interfaces (Report No. DOT HS 812 360). Washington, DC: National Highway Traffic Safety Administration.
Presentation of a FCW haptic signal via the driver's seat pan has also been investigated. NHTSA's “Human factors design guidance for driver-vehicle interfaces” contains best practice information for implementation of haptic displays, including “Generating a Detectable Signal in a Vibrotactile Seat.” 141 In a large-scale field test of FCW and LDW systems on model year 2013 Chevrolet and Cadillac vehicles, the University of Michigan Transportation Research Institute and GM found that GM's Safety Alert Seat, which provides haptic seat vibration pulses, increases driver acceptance of both FCW and LDW systems compared to auditory signals. 142
141 Campbell, J.L., Brown. J.L., Graving, J.S., Richard, C.M., Lichty, M.G., Sanquist, T., . . . & Morgan, J.L. (2016, December). Human factors design guidance for driver-vehicle interfaces (Report No. DOT HS 812 360). Washington, DC: National Highway Traffic Safety Administration.
142 Flannagan, C., LeBlanc, D., Bogard, S., Nobukawa, K., Narayanaswamy, P., Leslie, A., Kiefer, R., Marchione, M., Beck, C., and Lobes, K. (2016, February), Large-scale field test of forward collision alert and lane departure warning systems (Report No. DOT HS 812 247), Washington, DC: National Highway Traffic Safety Administration.
NHTSA's March 2022 request for comments notice on the NCAP sought comment on which FCW modalities or modality combinations should receive credit and asked specific questions regarding haptic signals and whether certain types should be excluded from consideration ( e.g., because they may be such a nuisance to drivers that they are more likely to disable the FCW or AEB system). A preliminary review of comments on that notice found multiple comments highlighting a need for more research relating to FCW signals. The National Transportation Safety Board highlighted a need for additional information regarding haptic signals presented in different locations stating “[w]ithout examining the efficacy of different means of providing haptic alerts and defining appropriate, research-supported implementations, a prudent approach would give credit only for audible unimodal alerts or for bi-modal alerts that include audible alerts.” Rivian stated “[t]he agency should award credit to systems that provide both audible and haptic alerts and provide the option to turn either of them OFF based on driver preference. These audible or haptic alerts should be in sync with providing a visual alert of an impending collision. The agency should recommend the decibel level and the haptic feedback location and type as a baseline and based on research on reducing nuisance to the driver.”
Given the lack of consensus within available research as to the best location for a FCW haptic signal (seat belt, seat pan, steering wheel, or brake pulse), and NHTSA's ongoing review of comments submitted in response to the March 2022 request for comments, NHTSA is not at this time proposing to require a haptic FCW component, but invites comment on whether requiring FCW to contain a haptic component presented via any location may increase FCW effectiveness or whether a FCW haptic signal presented in only one specific, standardized location should be allowed.
While the FCW auditory signal is envisioned as being the primary means of warning the driver, providing a haptic FCW signal that would complement or supplant the auditory warning signal would likely improve FCW perception for hearing-impaired drivers. Some drivers also may prefer an alternative modality to auditory warnings ( e.g., due to annoyance caused by the auditory warning). However, the degree of additional benefit that may be accrued by requiring a haptic FCW signal in addition to a well-designed auditory and visual FCW that meets the specifications proposed is not known.
A haptic FCW signal, to be effective, would necessarily require the driver to be in physical contact with the vehicle component through which the haptic signal is presented in order to perceive the warning. For example, if the driver is not wearing a seat belt, a haptic FCW signal presented via the seat belt would not be effectively received. A seat pan based haptic FCW signal would be unlikely to have such a non-contact issue. NHTSA is interested in research data documenting the comparison of a compliant auditory-visual FCW to that same FCW with an added haptic component. NHTSA also welcomes any objective data documenting the relative effectiveness of different haptic signal presentation locations for FCW use.
3. Performance Test Requirements
This NPRM would require that, when approaching a lead vehicle during testing, the subject vehicle must provide a forward collision warning and subsequently apply the brakes to avoid a collision. This performance requirement is conducted under a defined set of conditions, parameters ( e.g., relative vehicle speeds and distances), and test procedures.
For all vehicle tests where the subject vehicle approaches a lead vehicle, NHTSA is proposing that the minimum performance requirement is complete avoidance of the lead vehicle. NHTSA chose the performance criterion of collision avoidance because it maximizes the safety benefits of the rule as compared to a metric that might permit a reduced speed collision. NHTSA has tentatively concluded that a no-contact criterion for the performance test requirements is practicable to achieve, consistent with the need for safety, and may be necessary to ensure test repeatability.
NHTSA also seeks comment on the potential consequences if vehicle contact were allowed during testing. First, NHTSA seeks comment on how allowing contact during testing would affect the safety benefits of AEB systems. Second, NHTSA seeks comment on whether allowing contact during testing would create additional testing burdens. Specifically, NHTSA is concerned that any performance test requirement that allows for vehicle contact not resulting in immediate test failure could result in the non-repeatability of testing without expensive or time-consuming interruptions to testing, and seeks comment on this concern. For instance, if a test vehicle were to strike the lead vehicle test device, even at a low speed, sensors on the vehicle could become misaligned or the vehicle test device may be damaged, including in ways that are not immediately observable. For example, damage to the test device might affect the radar cross section that requires a long verification procedure to discover.
4. Performance Test Scenarios
NHTSA is proposing three track test scenarios to evaluate AEB performance. The test scenarios have the subject vehicle travelling toward a lead vehicle which is ahead in the same lane. However, the lead vehicle may be either stopped, moving at a constant but slower speed, or decelerating to a stop.
These three tests were chosen because they represent the three most common pre-crash scenarios involving a lead vehicle. A NHTSA research study of heavy vehicles comprising the striking vehicle in rear-end crashes in the United States determined that four pre-crash scenarios exist in data of both fatal and non-fatal crashes. 143 These four scenarios include the three listed above, and also a “cut-in” case in which a lead vehicle changed lanes or merged into the path of the heavy vehicle just prior to the crash. The cut-in scenario was excluded from the test scenarios for this proposal because the research study shows that it was much less likely to occur than the other three scenarios. 144
143 Woodrooffe, J., et al. “Performance Characterization and Safety Effectiveness Estimates of Forward Collision Avoidance and Mitigation Systems for Medium/Heavy Commercial Vehicles,” Pg. 12. Report No. UMTRI–2011–36, UMTRI (August 2012). Available at https://www.regulations.gov/document/NHTSA-2013-0067-0001 (last accessed June 9, 2022).
144 The cut-in scenario represents less than 5% of the pre-crash scenarios.
i. Stopped Lead Vehicle
This test recreates a roadway scenario where the subject vehicle encounters a lead vehicle which is stopped ahead in the same lane. Figure 5 shows the basic setup for the stopped lead vehicle scenario. The subject vehicle is driven toward the stationary lead vehicle at a constant speed, and the accelerator is only released if a forward collision warning is issued. The test ends when the subject vehicle either automatically stops without impact, or proceeds to strike the lead vehicle.
NHTSA proposes testing under two conditions for the subject vehicle: testing without any manual brake application (to test the CIB component) and testing with manual brake application (to ensure that the driver's application of the brake pedal does not inhibit the functionality of the AEB system). Testing with no brake application simulates a driver who does not intervene in response to an FCW alert prior to a crash. Testing with brake application simulates a driver who applies the brakes, but the manual brake application is insufficient to prevent a collision.
BILLING CODE 4910–59–P
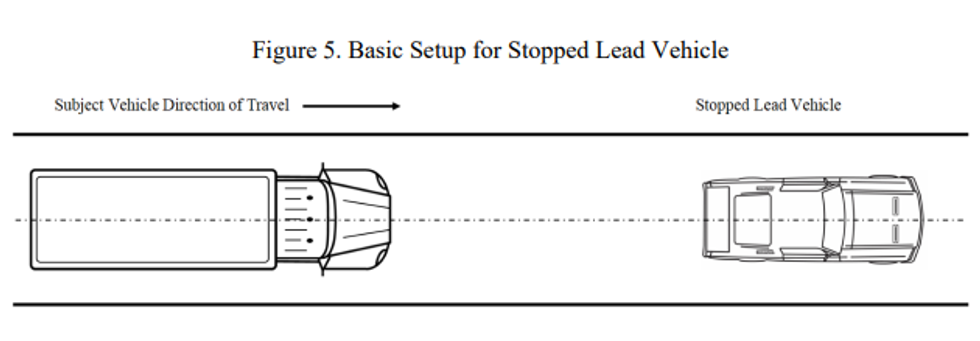
ii. Slower-Moving Lead Vehicle
This test recreates a roadway scenario where the subject vehicle encounters a lead vehicle that is moving at a constant but slower speed ahead in the same lane. Figure 6 shows the basic setup for the slower-moving lead vehicle scenario. The subject vehicle is driven toward the lead vehicle at a constant speed, and its accelerator is then released after the AEB system in the subject vehicle issues a forward collision warning. The test ends when the subject vehicle either slows down to a speed less than or equal to the lead vehicle's speed without impact or strikes the lead vehicle. As with the stopped lead vehicle test, NHTSA proposes testing under two conditions for the subject vehicle: without any manual brake application and with manual brake application.
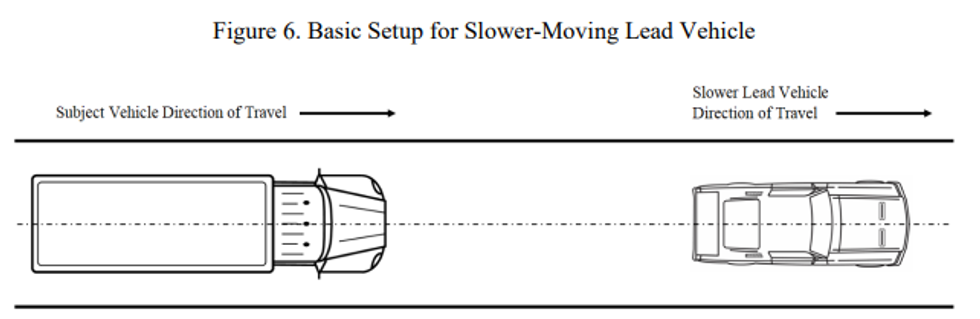
iii. Decelerating Lead Vehicle
This test recreates a roadway scenario where the subject vehicles encounter a lead vehicle that is slowing down ahead in the same lane. At the start of the test, both the subject vehicle and lead vehicle travel at the same constant speed, while maintaining a predetermined relative distance, or headway. The lead vehicle then begins to decelerate, reducing the headway. Once the AEB system in the subject vehicle issues a forward collision warning, the subject vehicle's accelerator is released. The test ends when the subject vehicle either automatically stops without impact or strikes the lead vehicle. As with the prior two tests, NHTSA proposes testing under two conditions for the subject vehicle: without any manual brake application and with manual brake application. Figure 7 shows the basic setup for the decelerating lead vehicle scenario.
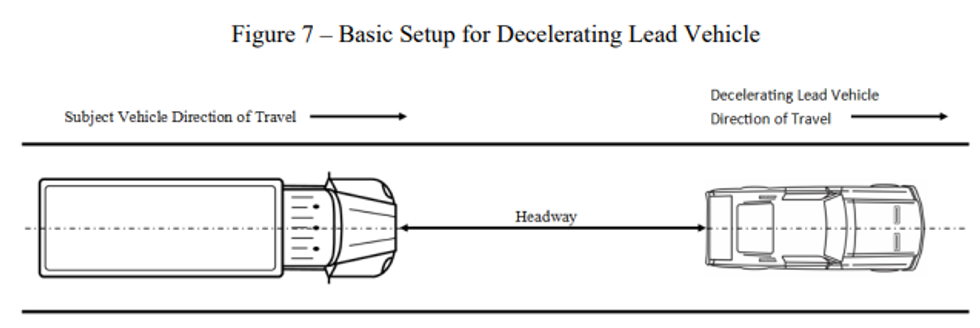
BILLING CODE 4910–59–C
5. Parameters for Vehicle Tests
The test procedures for each scenario reference a set of parameters. These parameters are presented in Table 16, where each row represents a potential combination of parameters to be used for a test run. The parameters define the speeds, decelerations, headways, and manual brake applications used for the choreography of the vehicle test scenarios. Specifically, these include:
• Subject Vehicle Speed (V SV )—speed at which the subject vehicle travels toward the lead vehicle
• Lead Vehicle Travel Speed (V LV )—speed at which the lead vehicle travels in the same direction as the subject vehicle
• Headway—the distance between the subject vehicle and the lead vehicle
• Lead Vehicle Deceleration—the rate at which the lead vehicle reduces its speed
• Manual Brake Application—specifies whether or not the service brakes of the subject vehicle will be applied “manually,” or via a brake controller
| Test scenarios | Speed (km/h) | Headway (m) | Lead vehicle decel. (g) | Manual brake application | |
| V SV | V LV | ||||
| Stopped Lead Vehicle | Any 10–80 | 0 | no. | ||
| Any 70–100 | 0 | yes. | |||
| Slower-Moving Lead Vehicle | Any 40–80 | 20 | no. | ||
| Any 70–100 | 20 | yes. | |||
| Decelerating Lead Vehicle | 50 | 50 | Any 21–40 | Any 0.3–0.4 | no. |
| 50 | 50 | Any 21–40 | Any 0.3–0.4 | yes. | |
| 80 | 80 | Any 28–40 | Any 0.3–0.4 | no. | |
| 80 | 80 | Any 28–40 | Any 0.3–0.4 | yes. | |
Some of these parameters are proposed as ranges. 145 The use of ranges allows NHTSA to ensure AEB system performance remains consistent under a variety of conditions and that no substantial degradation in performance occurs at any point within the range. NHTSA tentatively concludes that requiring a minimum performance only at discreet, predetermined values within these proposed ranges may not ensure that AEB system performance is sufficiently robust to meet the need for safety.
145 In instances where an FMVSS includes a range of values for testing and/or performance requirements, the use of the word “any” is consistent with 49 CFR 571.4.
i. Vehicle Speed Parameters
The proposed test speed ranges were selected considering two primary factors. The first factor is the practical ability of AEB technology to consistently operate and avoid contact with a lead vehicle at the widest reasonable range of speeds. A larger range of speeds could yield more safety benefits. Also, a larger range of speeds will more thoroughly test the capabilities of the AEB system. NHTSA, through its understanding of vehicle braking systems described in established standards such as FMVSS Nos. 105 and 121, knows that testing stopping distance at 60 mph is indicative of the service brake performance over a range of speeds, and in those cases testing at a single speed is acceptable. However, as observed in vehicle testing for NHTSA research, AEB performance during testing at interstate speeds does not necessarily indicate what the same system's performance will be at lower speeds. Thus, NHTSA tentatively concludes that testing over a range of speeds is necessary to fully assess AEB performance.
The second factor is the practical limit of safely conducting vehicle tests of AEB systems. NHTSA's testing must be safe and repeatable as permitted by track conditions and testing equipment. For example, if the AEB system does not intervene as required or if test parameters inadvertently fall outside of the specified limits, it should be possible to safely abort the test. In the event the subject vehicle does collide with the lead vehicle, the test should be designed so that it does so in a manner that will not injure the testing personnel nor cause excessive property damage. Additionally, test tracks may be constrained by available space and there may be insufficient space to accelerate a heavy vehicle up to a high speed and still have sufficient space to perform a test. Many types of heavy vehicles are not capable of accelerating as quickly as lighter vehicles and reaching high test speeds may require long distances that exceed what is available at many vehicle testing facilities. At approximately 100 km/h, the agency found that constraints with available test track length, in conjunction with the time required to accelerate the vehicle to the desired test speed, made performing these high speed tests with heavy vehicles logistically challenging. 146 The agency has tentatively concluded that at this time the maximum practicable test speed is 100 km/h.
146 During testing of a 2021 Freightliner Cascadia at speeds approaching 100 km/h, NHTSA experienced difficulty establishing valid test conditions due to insufficient track length.
The maximum speed of 100 km/h is included in the test speed range when manual braking is present; the manual braking will guarantee a speed reduction even if the AEB system does not activate before reaching the lead vehicle, which would limit potential damage to the test equipment and reduce other potential risks. When no manual braking is allowed, the maximum test speed would be 80 km/h so that, in the event the AEB system does not provide any braking at all, risk to personnel and damage to test equipment are reduced. Over 82 percent of rear-end crashes where the heavy vehicle is the striking vehicle occur at speeds below 80 km/h. 147 However, the majority of fatal crashes occur at speeds above 80 km/h, and approximately 40 percent of these occur at travel speeds between 80 and 100 km/h. The stopped lead vehicle test scenario uses a no-manual-braking test speed range of 10 to 80 km/h and a manual-braking test speed range of 70 to 100 km/h. Together, these test speed ranges overlap with the travel speeds at which heavy vehicle rear-end crashes occur in the real world, while reducing the potential risk and damage to test equipment and vehicles and not exceeding the practical physical size limits of test tracks.
147 This is based on analysis of 2017–2019 crash data.
Similarly, the slower-moving lead vehicle test scenario uses speed ranges of 40 to 80 km/h and 70 to 100 km/h for the subject vehicle, while the lead vehicle travels ahead at a constant speed of 20 km/h. The lower end of the subject vehicle test speed range is 40 km/h so that the subject vehicle is traveling faster than the lead vehicle. The decelerating lead vehicle tests are run at either 50 or 80 km/h. This test is performed at two discreet speeds rather than at ranges of speeds because the main factors that test AEB performance are the variation of headway, or the distance between the subject vehicle and lead vehicle, and how hard the lead vehicle brakes. Additionally, because these tests contain a larger number of variables requiring more complex test choreography, limiting the test to two discreet test speeds reduces the number of potential test conditions and reduces potential test burden.
During each test run in any of the test scenarios, the vehicle test speed will be held constant until the test procedure specifies a change. NHTSA is proposing that vehicle speed would be maintained within a tolerance range of 1.6 km/h of the chosen test value. This is important for test consistency. Vehicle speed determines the time to collision, which is a critical variable in AEB tests. In NHTSA's experience, both the subject vehicle and lead vehicle speeds can be reliably controlled within the 1.6 km/h tolerance range, and speed variation within that range yields consistent test results. A tighter speed tolerance is burdensome and unnecessary for repeatability as it may result in a higher test-rejection rate, without any greater assurance of accuracy of the test track performance.
NHTSA's vehicle testing suggested that the selected speed ranges for the various scenarios are within the capabilities of at least some recent model year AEB-equipped production vehicles. For example, the 2021 Freightliner Cascadia avoided collision in the stopped lead vehicle test at all speeds between 40 and 85 km/h, most speeds between 30 and 90 km/h (except 30 and 60 km/h) in the slower-moving lead vehicle test, and in all decelerating lead vehicle tests that were run at the proposed parameters. This vehicle's AEB system did not prevent a collision at lower speeds between 20 and 35 km/h for the stopped lead vehicle test. However, the 2021 Dodge Ram 550 avoided collision in all stopped lead vehicle tests from 10 to 40 km/h. In many test cases where current AEB systems did not prevent a collision, the AEB significantly reduced the speed before the collision. While these current AEB systems perform a bit differently depending on the vehicle, given that this notice proposes a lead time for manufacturers to come into compliance with the proposed performance requirement, the agency expects that compliance with these requirements would be achievable.
ii. Headway
The decelerating lead vehicle test scenario includes a parameter defining how far ahead the lead vehicle is from the subject vehicle at the beginning of the test, which is referred to as headway. Headway and lead vehicle deceleration are the main factors for the dynamics of the decelerating lead vehicle test since both the lead and subject vehicles start the test at the same constant speed. At the start of the test, when the vehicles are both travelling at 50 km/h, the proposed headway specification is any distance between 21 m and 40 m. 148 When the vehicles are both travelling at 80 km/h, the proposed headway specification is any distance between 28 m and 40 m. Headways are proposed as a range in order to assure AEB functionality over a wider range of driving scenarios. A basic kinematic simulation of heavy vehicle AEB braking under the proposed test parameters, assuming factors such as AEB response time and foundation brake reaction time/deceleration similar to what was observed in testing, indicated that headways shorter than 21 and 28 m would not be realistic to achieve and would inevitably result in a collision.
148 The bounds of the headway range are consistent with the headways in the April 2021 European New Car Assessment Programme (Euro NCAP), Test Protocol—AEB Car-to-Car systems, Version 3.0.3 for the same scenario.
The upper limit of 40 m was chosen because testing at longer headways does not provide additional insight into AEB performance with regard to decelerating lead vehicles. At headways greater than 40 m, the lead vehicle decelerating may come to a full stop prior to the subject vehicle actuating the brakes. This essentially becomes a stopped lead vehicle test. Allowing for a range of headways during testing also makes the choreography of the test possible by providing a tolerance for the headway. At the start of the test, the speed of both the subject vehicle and lead vehicle are the same and are maintained within the tolerance specified (plus or minus 1.6 km/h). As each vehicle's speed fluctuates a bit differently within these bounds, in turn the headway between the vehicles accordingly fluctuates as well. As long as the headway fluctuation is within the proposed range, the test can still be considered valid, and no headway tolerance needs to be established.
iii. Lead Vehicle Deceleration Parameter
The decelerating lead vehicle test scenario includes a deceleration parameter that dictates how quickly the lead vehicle will slow down in front of the subject vehicle. The agency has tentatively concluded that this parameter range of 0.3g to 0.4g represents real-world, manual application of the service brake. Previous NHTSA research had identified 3.0 m/s 2 (.306g) as “reasonably comfortable for passenger car occupants” and that on average, drivers brake in such a manner that the vehicle decelerates at an average of 0.48g when presented with a unexpected obstacle. 149 The upper limit of the lead vehicle braking is proposed at 0.4g to avoid a test condition in which the lead vehicle would provide greater brake inputs than those necessary to meet the minimum stopping distance requirements. NHTSA took into consideration the stopping distance requirements for heavy vehicles under FMVSS Nos. 105 and 121 and the resulting average decelerations that those vehicles would be required to achieve. For example, an air-braked tractor trailer under FMVSS No. 121 would need to brake at 0.41g to meet the stopping distance of 310 ft from 60 mph. 150 Given the headway parameters and vehicle speeds in this proposal, the agency believes a lead vehicle deceleration above 0.4g would create a requirement that could effectively reduce the minimum stopping distance requirements for vehicles generally.
149 Gregory M. Fitch, Myra Blanco, Justin F. Morgan, Jeanne C. Rice, Amy Wharton, Walter W. Wierwille, and Richard J. Hanowski (April 2010). Human Performance Evaluation of Light Vehicle Brake Assist Systems: Final Report (Report No. DOT HS 811 251) Washington, DC: National Highway Traffic Safety Administration, pgs. 13 and 101.
150 This assumes an average deceleration that is achieved after an initial brake actuation time of 0.45 seconds, as this is the maximum actuation time allowed by FMVSS No. 121.
6. Manual Brake Application in the Subject Vehicle
Each of the three lead vehicle test scenarios includes tests that are conducted with manual brake application in the subject vehicle. The process for testing with manual brake application is identical to what is considered a test for dynamic brake support or DBS in NHTSA's NCAP for light vehicles. While the term DBS is not usually associated with heavy vehicles, NHTSA is including this requirement in this proposal to ensure that the driver's application of the brake pedal does not inhibit the functionality of the AEB system if the driver's brake application is insufficient to avoid a crash. The manual brake application procedure specifies that the subject vehicle's service brakes are applied by using a robotic brake controller to ensure accurate and consistent test conduct.
A NHTSA study that examined light vehicle drivers' behavior in response to potential frontal crash situations found that they typically exhibit multi-stage braking behavior. 151 This means that the drivers initially applied and held the brake moderately, and then continued to a full application if perceived to be necessary. A subsequent NHTSA study concluded that a significant portion of heavy vehicle operators display the same multi-stage braking behavior. 152 The agency believes that in real world cases where the operator may apply insufficient brake force to avoid a rear-end collision, an AEB system should apply the necessary supplemental braking necessary to avoid a collision. Furthermore, by using manual brake application in the test scenarios, NHTSA is able to test AEB performance at higher test speeds.
151 Mazzae, E., Barickman, F., Scott Baldwin, G., and Forkenbrock G., “Driver Crash Avoidance Behavior with ABS in an Intersection Incursion Scenario on Dry Versus Wet Pavement,” SAE Technical Paper 1999–01–1288, 1999, doi:10.4271/1999–01–1288.
152 Every, J., Salaani, M., Barickman, F., Elsasser, D., et al., “Braking Behavior of Truck Drivers in Crash Imminent Scenarios,” SAE International Journal of Commercial Vehicles, 7(2):2014, doi:10.4271/2014–01–2380.
In real world cases, the brake pedal can be applied by a heavy vehicle operator in an infinite number of ways (varying force, reaction time, duration, etc.). Since the manual brake application represents an operator's response to an unexpected obstacle and the forward collision warning, the agency is proposing a brake pedal application that results in a mean deceleration of 0.3g. A heavy vehicle field study by NHTSA indicated that when presented with an FCW triggered by a valid object and requiring a crash avoidance maneuver, the operators braked on average at a maximum of 0.3g. 153 Manually applying the brake at 0.3g also is a low enough value to improve the capability of observing an AEB automatic braking intervention that is occurring simultaneously on top of that. The minimum stopping distance requirements for heavy vehicles in existing FMVSSs require braking at around 0.4g. Thus hypothetically, if a heavy vehicle's service brakes were manually applied at a higher deceleration of 0.4g for example, and the brakes were only capable of a maximum of 0.4g of deceleration, AEB intervention would be incapable of producing additional deceleration and would not be observable.
153 Grove, K., Atwood, J., Hill, P., Fitch, G., Blanco, M., Guo, F., . . . & Richards, T. (2016, June). Field study of heavy-vehicle crash avoidance systems. (Final report. Report No. DOT HS 812 280). Washington, DC: National Highway Traffic Safety Administration.
There are two methods to perform the manual brake application—using either displacement feedback or hybrid feedback. Both methods are intended to be carried out by a robotic brake pedal controller in closed loop operation, and the method that is most suitable to the subject vehicle is chosen. Regardless of the method, it is necessary initially to determine a pedal position which, in the absence of any automatic braking from the AEB system, results in an average vehicle deceleration of 0.3g. The displacement feedback method then simply requires moving the brake pedal to the 0.3g position quickly, at a rate of 254 mm/s, 154 and then maintaining that position. However, automatic braking in certain vehicles requires the pedal position to move further toward the floor, and can cause conflict with the displacement feedback method's control of pedal position, in turn adversely affecting test results. 155 The hybrid feedback pedal control method provides a solution to this conflict. The hybrid method initially requires the same pedal position control, but then almost immediately begins to control the force on the pedal (and not the position) to maintain the 0.3g deceleration. If the AEB system thereafter requires further movement of the pedal, the brake controller is able to “follow” the pedal while still applying the appropriate force. 156 NHTSA is proposing that the brake will be applied 1.0 second after the vehicle has provided a FCW; this is based on the average time it takes a driver to react when presented with an obstacle. 157 Although these average decelerations and reaction times are based on behavior of light vehicle drivers, we feel that it is sufficient basis to simulate a scenario in which a heavy vehicle operator brakes partially and insufficiently to fully avoid a rear-end collision.
154 Previous NHTSA research related to AEB examined pedal application rates by drivers in emergency and non-emergency situations, and determined that pedal application rate is important in AEB testing with manual braking, and that the appropriate application rate is 254 mm/s. NHTSA, August 2014. Automatic Emergency Braking System (AEB) Research Report, An Update of the June 2012 Research Report Titled, “Forward-Looking Advanced Braking Technologies Research Report.” Docket NHTSA–2012–0057–0037.
155 NHTSA, August 2014. Automatic Emergency Braking System (AEB) Research Report, An Update of the June 2012 Research Report Titled, “Forward-Looking Advanced Braking Technologies Research Report.” Docket No. NHTSA–2012–0057–0037.
156 Id.
157 Previous NHTSA research has shown that on average, it takes drivers 1.04 s to begin pressing the brake when presented with an unexpected obstacle and 0.8 s when presented with an anticipated obstacle. Gregory M. Fitch, Myra Blanco, Justin F. Morgan, Jeanne C. Rice, Amy Wharton, Walter W. Wierwille, and Richard J. Hanowski (2010, April) “Human Performance Evaluation of Light Vehicle Brake Assist Systems: Final Report” (Report No. DOT HS 811 251), Washington, DC: National Highway Traffic Safety Administration, p. 101.
B. Conditions for Vehicle Tests
The test conditions are used to control the environmental, road surface, subject vehicle, and equipment conditions to ensure consistency both to define potential variabilities in conditions under which an AEB system would be expected to operate while also providing consistent conditions to reduce test variability due to extraneous factors. NHTSA recognizes that there are an unlimited number of non-ideal environmental conditions present in the real world, and it would be unreasonable to attempt to reproduce most of them within practical constraints in the testing environment. Thus, in many cases, the proposed test conditions were chosen to represent near-ideal conditions with the goal of reducing variability in the test results. For example, if testing were conducted at below-freezing temperatures with snowfall, it would be difficult to interpret whether poor test results were due to the AEB system or reduced road surface friction.
Many of the proposed conditions were selected based on research data and engineering practices, and reasonable deduction. In some cases, as appropriate, the agency considered that conditions should be the same or similar to what is specified in other heavy vehicle brake-related FMVSS. This usage of pre-established conditions may help reduce testing burden, since fewer testing conditions would need to be adjusted between different FMVSS brake-related compliance tests. It also ensures that the minimum stopping distance requirements in the braking standards would be achievable during an AEB test.
Each test procedure for the three scenarios specifies a point at which thereafter the test conditions described in this section apply and will be maintained. For the stopped lead vehicle and slower-moving lead vehicle test scenarios, this point is at a 5 second time to collision. For the decelerating lead vehicle test scenario, this point is 1 second prior to the onset of lead vehicle deceleration.
1. Environmental Conditions
The ambient temperature range specified in this proposal is 2 to 40 degrees Celsius; this is the same range as specified in FMVSS No. 136, which avoided testing at 0 degrees Celsius because it could impact tire performance and in turn the variability of test results.
The maximum wind speed is 5 m/s, which is the same as what is specified in FMVSS No. 136. This value was chosen to reduce the potential lateral displacement of certain heavy vehicles.
NHTSA considered that certain environmental conditions should be near-ideal to prevent sensor performance degradation and maintain repeatability of vehicle testing. First, ambient illumination would be at or above 2,000 lux. This represents daytime illumination that is at a minimum equivalent to an overcast day. 158 A NHTSA study has shown that darkness can cause degradation of sensor performance. 159 NHTSA analysis shows that 87 percent of heavy vehicle rear-end crashes occur during daylight conditions. 160 Therefore, NHTSA tentatively concludes that daylight testing is necessary to ensure that AEB systems address the rear-end crash safety problem.
158 During an overcast day (no sun), when the solar altitude is around 6 degrees, the light intensity on a horizontal surface is around 2,000 lux. Illuminating Engineering Society of North America. 1979. “Recommended Practice of Daylighting.”
159 NHTSA, August 2014. “Automatic Emergency Braking System (AEB) Research Report—An Update of the June 2012 Research Report Titled, `Forward-Looking Advanced Braking Technologies Research Report.' ” Docket NHTSA–2012–0057–0037.
160 Data are from 2017–2019 FARS and CRSS crash databases, as discussed in the PRIA section on initial AEB target population.
Second, during testing, the sun would not be below 15 degrees of elevation and within 25 degrees laterally from the center plane of the subject vehicle. This specification reduces the likelihood of glare or washout for camera-based sensors that could lead to degradation of sensor and AEB system performance. 161
161 NHTSA, August 2014. “Automatic Emergency Braking System (AEB) Research Report—An Update of the June 2012 Research Report Titled, `Forward-Looking Advanced Braking Technologies Research Report.' ” Docket NHTSA–2012–0057–0037.
Visibility also would not be affected by fog, smoke, ash or other particulate, as recommended in previous agency research findings. 162 This improves test repeatability and also aligns with many real-world, rear-end crash conditions. A review of NHTSA's crash data indicates that 81 percent of those occur when the weather conditions are clear or cloudy and with no precipitation. 163
162 NHTSA, August 2014. “Automatic Emergency Braking System (AEB) Research Report—An Update of the June 2012 Research Report Titled, `Forward-Looking Advanced Braking Technologies Research Report.' ” Docket NHTSA–2012–0057–0037.
163 This is also supported by another study (Grove, Atwood, Fitch and Blanco, M, 2016, “Field Study of Heavy-Vehicle Crash Avoidance Systems”) which concluded that over 88 percent of heavy vehicle crashes occurred when the conditions were, clear, partly cloudy, or overcast.
2. Road Surface Conditions
The road surface upon which vehicle tests will be conducted must also be in a defined condition to help achieve repeatable testing. The proposed conditions specify that the road surface is free of debris, irregularities, or undulations, such as loose pavement, large cracks, or dips. These could affect the vehicle's ability to brake properly or maintain its heading, and ultimately reduce the repeatability of a test. The test surface is also required to be level, with a slope between 0 and 1 degrees, because the slope of a road surface can affect the performance of an AEB-equipped vehicle. 164 A surface that slopes up and down could obstruct a sensor's view of an object ahead. It could also influence the dynamics and layout involved in the proposed AEB test scenarios, as travelling up or down a slope makes braking to a stop more or less difficult. In order to have predictable tire adherence under braking, the surface must also be dry and have a controlled coefficient of friction. NHTSA is proposing that the test track surface have a peak friction coefficient of 1.02 when measured in accordance with ASTM International (ASTM) E1337 165 using an ASTM F2493 standard reference test tire and without water delivery. 166 Surface friction is a critical factor in brake system performance testing, including AEB, since it correlates with tire grip and the achievable stopping distance. The presence of moisture will significantly change the measured performance of a braking system. A dry surface is more consistent and provides for greater test repeatability. Also, the proposed peak friction coefficient is the same value that NHTSA uses for brake performance testing.
164 Kim, H. et al., “Autonomous Emergency Braking Considering Road Slope and Friction Coefficient,” International Journal of Automotive Technology, 19, 1013–1022 (2018).
165 ASTM International, ASTM E1337, “Standard Test Method for Determining Longitudinal Peak Braking Coefficient (PBC) of Paved Surfaces Using Standard Reference Test Tire.”
166 See 87 FR 34800 (June 8, 2022), Final Rule, Federal Motor Vehicle Safety Standards, Consumer Information; Standard Reference Test Tire.
This proposal specifies up to two straight lines be marked on the test surface to simulate lane markings. In order to provide flexibility for different road configurations at a variety of test track facilities, lane markings may or may not be present during testing. If present, the lines would be of any color or configuration ( e.g., solid, dashed, double-line, etc.). If two lines are used, they would be parallel to each other and between 2.7 to 4.5 m apart, which is representative of typical lane widths.
Lastly, the environment would not contain obstructions that could interfere with detection of a lead vehicle or other test equipment ahead and have an unintentional effect on the field of view of the AEB system, in turn compromising test repeatability. Thus, the subject vehicle during testing would not travel beneath overhead structures such as signs, bridges, or gantries, and each compliance test would be conducted without any vehicles, obstructions, or stationary objects within one lane width of either side of the subject vehicle path unless called for in the test procedure.
3. Subject Vehicle Conditions
Many of the subject vehicle conditions exist to ensure that a vehicle chosen for testing is in a working condition that represents the vehicle as it is sold into the market, and capable of performing as intended by the manufacturer. Thus, the vehicle conditions specify that no AEB malfunction telltale is active, vehicle components ahead of AEB sensors are clean and do not obstruct the sensors, the original tires are installed and properly inflated, and non-consumable fluids ( e.g., brake fluid, engine coolant, etc.) are full.
Other conditions exist to ensure that vehicle performance is comparable to that found in the real world. Prior to testing, the vehicle's service brakes are burnished according to the burnishing procedures already used in FMVSS No. 121 or 105 testing, as appropriate for the vehicle prior to the beginning of testing. Burnishing helps to gradually seat and condition new brake components, particularly the brake pads and rotors/drums, which come into contact and provide friction under braking. Burnishing helps achieve optimal and repeatable brake performance. If burnishing was done previously, for example due to the running of compliance tests for other FMVSS, it would not be repeated.
The agency also proposes that the brake temperatures be between 66 and 204 degrees Celsius prior to the beginning of a test, which is the same as specified in FMVSS No. 136. In the agency's experience, this initial temperature range allows the brakes to perform well without being under or over heated during testing, and the upper end of 204 degree Celsius does not require unreasonably long cool-down time between test runs.
The agency has also considered that vehicles may have adjustable characteristics or configurable systems that a vehicle operator may choose to adjust, and some of these are factors that could affect the outcome of an AEB test. Since each vehicle operator could potentially choose different settings for these systems, the testing would ensure that AEB systems are capable of meeting the test requirements regardless of which choices were made. Accordingly, this proposal specifies that these adjustable factors will be nearly in any configurable level during testing. Consumable fluids ( e.g., fuel, diesel exhaust fluid, etc.) and propulsion battery charge will be between 5–100 percent of their capacity. Cruise control systems would be tested in any available setting, including adaptive cruise control modes. In the event that adaptive cruise control is engaged and remains engaged during the event, the FCW would not be required. This is because an adaptive cruise control system is intended to slow the vehicle to avoid a collision prior to a collision being imminent and without notification to the driver. 167
167 Adaptive cruise control is a driver assistance technology that automatically adjusts vehicle speed to maintain a certain distance from a vehicle ahead.
Forward collision warnings would be tested in any configurable setting. If the vehicle is equipped with an engine-braking system, tests would be conducted with the system either engaged or disengaged. The controls for the headlamps and regenerative braking would be tested in any available position.
Regarding the weight of the subject vehicle during testing, this proposal specifies that the vehicle is loaded to its gross vehicle weight rating. Truck tractors will be loaded to its GVWR by connecting a control trailer. The specifications for this control trailer, which is an unbraked, single-axle flatbed, are equivalent to those found in FMVSS No. 136. The agency believes it is important to test the performance of AEB systems when the vehicle is at its heaviest allowable condition, because heavy vehicles often travel in a fully loaded condition and it generally presents the most challenging scenario for braking ( i.e., stopping a heavier vehicle is more difficult). This loading condition is identical to the loaded condition specified for FMVSS stopping distance assessment. This may improve testing efficiency for NHTSA by having fewer loading conditions specified among FMVSS.
Finally, because a vehicle will be tested at its GVWR, this proposal specifies that, if a vehicle is equipped with a liftable axle, it will be placed in the down position during testing.
C. Proposed Requirements for False Activation
1. No Automatic Braking Requirement
NHTSA proposes a requirement that the subject vehicle, when presented with two false activation test scenarios, must not automatically apply braking that results in a peak deceleration of more than 0.25g when manual braking is not applied, nor a peak deceleration of more than 0.45g when manual braking is applied. False activation refers to cases where the AEB systems automatically activates the service brakes although there is no object present in the path of the vehicle with which it would collide. The associated vehicle tests are run both with and without manual braking. During test runs without manual braking, the AEB system must not initiate braking that results in a peak deceleration of more than 0.25g. A 0.25g deceleration is below the 0.3g threshold described earlier as a comfortable deceleration which has a low probability of creating safety concerns such as rear-end crashes (if the subject vehicle would brake too hard). 168 Also, 0.25g is an easily measurable deceleration when testing.
168 Gregory M. Fitch, Myra Blanco, Justin F. Morgan, Jeanne C. Rice, Amy Wharton, Walter W. Wierwille, and Richard J. Hanowski (2010, April) Human Performance Evaluation of Light Vehicle Brake Assist Systems: Final Report (Report No. DOT HS 811 251) Washington, DC: National Highway Traffic Safety Administration, p. 13.
During test runs when manual braking is being applied, the AEB system must not initiate braking that results in a peak deceleration of more than 0.45g. When testing using manual braking, the goal is to have a manual braking deceleration of 0.3g, and so the AEB system must not cause more than approximately 0.15g of additional deceleration. This 0.15g amount is less than the 0.25g of peak deceleration permitted in tests without manual braking—however, allowing the same 0.25g above manual braking would mean that up to a total peak deceleration of 0.55g would be permitted. Because 0.55g could exceed the maximum deceleration capacity of certain heavy vehicles, it would, in turn, render the test impossible to fail for those vehicles. Therefore, the lower threshold of additional deceleration is proposed for false activation tests with manual braking.
2. Vehicle Test Scenarios
Under this proposal, the false activation requirement would be evaluated by executing two vehicle test scenarios—a steel trench plate test and a pass-through test. The steel trench plate test was chosen because in previous agency testing that included eight different false activation test scenarios, the steel trench plate scenario was the only one that produced false activation of the AEB system. 169 The pass-through test is similar to the United Nations Economic Commission for Europe (UNECE) Regulation 131 pass-through test. 170
169 Snyder, A., Martin, J., & Forkenbrock, G. (2013, July). “Evaluation of CIB system susceptibility to non-threatening driving scenarios on the test track.” (Report No. DOT HS 811 795). Washington, DC: National Highway Traffic Safety Administration.
170 UNECE Regulation 131, “Uniform provisions concerning the approval of motor vehicles with regard to the Advanced Emergency Braking Systems (AEBS),” see 6.8 False reaction test, U.N. Regulation No. 131 (Feb. 27, 2020), available at https://unece.org/fileadmin/DAM/trans/main/wp29/wp29regs/2015/R131r1e.pdf.
The proposed false activation tests establish only a baseline for system functionality. For practical reasons they are not comprehensive, nor sufficient to eliminate susceptibility to false activations in the myriad of circumstances in the real world. However, the proposed tests are a practicable means to establish a minimum threshold of performance. The agency expects that vehicle manufacturers will design AEB systems to thoroughly address the potential for false activations. 171 Manufacturers have a strong market incentive to mitigate false positives and have been successful even in the absence of specific requirements.
171 From NHTSA's NCAP Request for Comments notice regarding AEB: “Specifically, the Alliance stated that vehicle manufacturers will optimize their systems to minimize false positive activations for consumer acceptance purposes, and thus such tests will not be necessary. Similarly, Honda stated that vehicle manufacturers must already account for false positives when considering marketability and HMI.” 87 FR 13452 at 13460.
i. Steel Trench Plate
This test recreates a roadway scenario where the subject vehicles encounter a steel trench plate which is placed on the road surface ahead in the same lane. The subject vehicle is driven at 80 km/h toward the steel trench plate at a constant speed.
The tests would be conducted either with or without manual brake application. Manual braking is included in these scenarios to ensure that even when a vehicle's service brake is actuated, false activation would not occur. For tests without manual braking, the accelerator is only released if a forward collision warning is issued. For test with manual braking, the accelerator is released at either the forward collision warning or 1 second prior to the manual braking, whichever occurs first. Manual braking begins when the subject vehicle is 1.1 seconds away from the steel trench plate. The test ends when the subject vehicle either comes to a stop prior to crossing over the leading edge of the steel trench plate, or it proceeds to drive over the steel trench plate. Figure 8 shows the basic setup for the steel trench plate scenario.
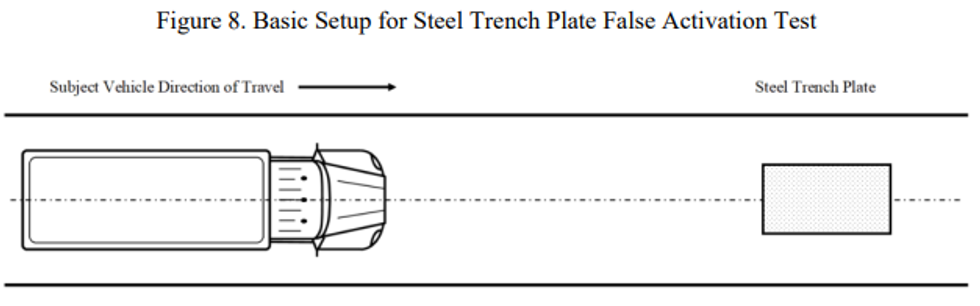
Unlike the test scenarios in which the subject vehicle approaches a lead vehicle, the agency proposes that the false activation tests be run at a single speed rather than over a range of speeds. False activations occurring at interstate speeds would create the most severe unintended consequences of AEB braking. Therefore, the proposal includes only a test at a single speed of 80 km/h.
ii. Pass-Through
This test recreates a roadway scenario where the subject vehicle must travel between two parked cars that are adjacent to the left and right sides of the subject vehicle's travel lane. The parked cars are represented by two vehicle test devices. The lateral distance between the parked cars is 4.5 m, which is sufficient to give the subject vehicle enough space to pass between them and yet be close enough to be in the field of view of AEB sensors. The subject vehicle is driven along the center of the travel lane and toward the gap between the parked cars at a speed of 80 km/h. For tests without manual braking, the accelerator is only released if a forward collision warning is issued. For tests with manual braking, the accelerator is released at either the forward collision warning or 1 second prior to the manual braking, whichever occurs first; manual braking begins when the front plane of the subject vehicle is 1.1 seconds away from the rear plane of the two parked cars).
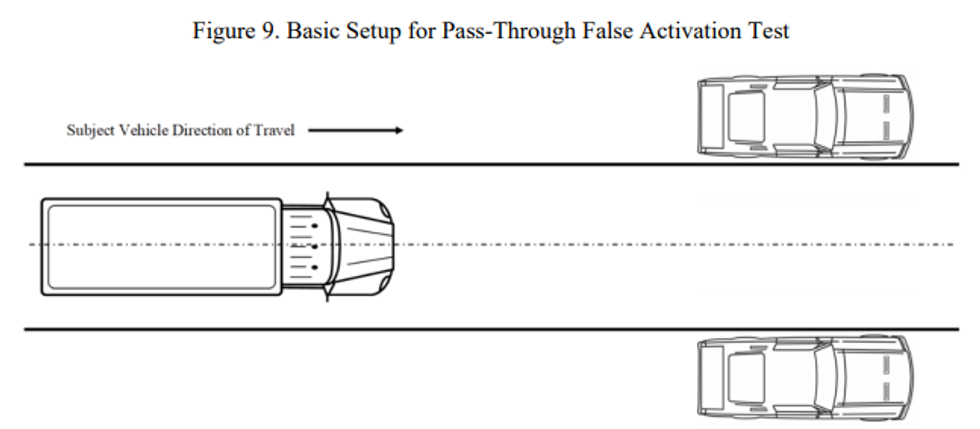
D. Conditions for False Activation Tests
The false activation requirement is conducted under a set test conditions identical to those used for AEB tests. However, there are equipment conditions which apply specifically to these false activation tests.
The equipment conditions that apply to the two false positive scenarios in this proposal relate to the steel trench plate and the vehicles used for the pass-through test. The steel trench plate is a piece of equipment that represents a steel plate typically used to cover excavation holes or irregularities in the road surface during construction work, and which is meant to be driven over by vehicles. The steel trench plate specified in this proposal is made of ASTM A36 steel, a common structural steel alloy, and has the dimensions 2.4 m x 3.7 m x 25 mm. Any metallic fasteners used to secure the steel trench plate are flush with the top surface of the plate, to avoid effectively increasing the profile height and radar cross-section of the plate. The two vehicles used for the pass-through test are vehicle test devices identical to those that would be used in the lead vehicle testing.
E. Potential Alternatives to False Activation Tests
As alternatives to these two false activation tests, NHTSA is considering requiring a robust documentation process, or specifying a data storage requirement. NHTSA is considering requiring this documentation and data in addition to or in place of the proposed false activation tests. First, NHTSA seeks comment on the anticipated impacts on safety and the certification burden if the agency were to finalize a rule that did not contain one or both of the proposed false positive tests.
The agency is considering requiring that manufacturers maintain documentation demonstrating that process standards were followed specific to the consideration of false application of automatic braking. Other industries where safety-critical software-controlled equipment failures may be life threatening ( e.g., aviation, 172 medical devices 173 ) are regulated in some respects via process controls ensuring that software development engineering best practices are followed. This approach recognizes that system tests are limited in their ability to evaluate complex, and constantly changing software driven control systems.
172 14 CFR 33.201(a) The engine must be designed using a design quality process acceptable to the Federal Aviation Administration, that ensures the design features of the engine minimize the occurrence of failures, malfunctions, defects, and maintenance errors that could result in an in-flight shutdown, loss of thrust control, or other power loss.
173 21 CFR 920.30(a)(1) Each manufacturer of any class III or class II device, and the class I devices listed in paragraph (a)(2) of this section, shall establish and maintain procedures to control the design of the device in order to ensure that specified design requirements are met.
Software development lifecycle practices that include risk management, configuration management, and quality systems are used in various safety-critical industries. ISO 26262 Road vehicles—Functional safety and related standards are examples of methods for overseeing software development practices. The agency is considering that a process standards approach could be a viable and practical way of regulating the risk of false positives, as false activation of braking is a complex engineering problem with multiple factors and conditions that must be considered in the real world. The agency seeks public comment on all aspects of requiring that manufacturers document that they have followed process standards in the consideration of the real-world false activation performance of the AEB system.
Finally, the agency considered requiring targeted data recording and storage of significant AEB activations. These data could then be used by manufacturers to improve system performance, or by the agency to review if a particular alleged false activation is part of a safety defect investigation. The agency is considering requiring that an AEB event that results in a speed reduction of greater than 20 km/h should activate the recording and storage of the following key information: date, time, engine hours (the time as measured in hours and minutes during which an engine is operated), AEB activation speed, AEB exit speed (vehicle speed at which the automatic braking is completely released), AEB exit reason ( e.g. driver override with throttle, or brake, or system decision), location, and camera image data. This information could be used by investigators to analyze the source of the activation and determine if an activation was falsely applied. Such data would need to be accessible by the agency and potentially the vehicle operator for a full and transparent analysis. The agency seeks comment on all aspects of this data collection approach as an alternative to false positive testing, including whether this list of potential elements is incomplete, overinclusive, or impractical.
F. Proposed Requirements for Malfunction Indication
NHTSA is proposing that AEB systems must continuously detect system malfunctions. If an AEB system detects a malfunction that prevents it from performing its required safety function, the vehicle would be required to provide the vehicle operator with a warning. The warning would be required to remain active as long as the malfunction exists while the vehicle's starting system is on. NHTSA would consider a malfunction to include any condition in which the AEB system fails to meet the proposed performance requirements. NHTSA is proposing that the driver must be warned in all instances of component or system failures, sensor obstructions, environmental limitations (like heavy precipitation), or other situations that would prevent a vehicle from meeting the proposed AEB performance requirements. While NHTSA is not proposing the specifics of the telltale, NHTSA anticipates that the characteristics of the alert will be documented in the vehicle owner's manual and provide sufficient information to the vehicle operator to identify it as an AEB malfunction.
NHTSA considered proposing requirements pertaining to specific failures and including an accompanying test procedure. For instance, the agency could develop or use available tests that specify disconnecting sensor wires, removing fuses, or covering sensors to simulate field malfunctions. Such requirements are not included in the proposed regulatory text, but NHTSA is interested in comments on this issue.
NHTSA also considered proposing minimum requirements for the malfunction telltale, to standardize ways of communicating to the vehicle operator. NHTSA understands that some malfunctions of the AEB system require repair (loose wires, broken sensors, etc.) while other malfunctions are temporary and will correct themselves over time (ice buildup on a camera). The agency considered requiring that the malfunction telltale convey the actions that a driver should take when a malfunction is detected. Such requirements are not included in the proposed regulatory text, but NHTSA is interested in comments on this issue. NHTSA seeks comment, including cost and benefit data, on the potential advantages of specifying test procedures that would describe how the agency would test a malfunction telltale and on the level of detail that this regulation should require of a malfunction telltale. Additionally, the agency considered requiring more details for the telltale itself, such as a standardized appearance (color, size, shape, illuminance). The agency seeks comment on the need and potential safety benefits of requiring a standardized appearance of the malfunction telltale and what standardized characteristics would achieve the best safety outcomes.
G. Deactivation Switch
The proposed regulatory text does not permit vehicle manufacturers to install a manual deactivation switch that would enable the vehicle operator to switch off the AEB. The text is silent regarding the permissibility of a switch but, under the framework of the FMVSS and NHTSA's interpretations of the standards, a deactivation switch would be prohibited if it would allow an AEB system to be deactivated in any circumstance in which the standard requires an AEB system to function. This is consistent with other FMVSS, such as FMVSS No. 108, “Lamps, reflective devices, and associated equipment,” which is silent about a switch deactivating the stop lamps but where NHTSA has interpreted the standard as prohibiting such a switch. 174 Standards in which a deactivation switch is permitted expressly permit the switch in the regulatory text, for example, FMVSS No. 126, “Electronic stability control systems for light vehicles,” where the standard specifically permits and regulates the performance of a deactivation switch, 175 and FMVSS No. 208, “Occupant crash protection,” where the standard permitted an on-off switch for the air bag for the front passenger seat on particular vehicles. 176
174 https://isearch.nhtsa.gov/files/23833.ztv.html (last accessed August 31, 2022).
175 FMVSS No. 126, “ESC systems for light vehicles,” S5.4: The manufacturer may include an “ESC Off” control whose only purpose is to place the ESC system in a mode or modes in which it will no longer satisfy the performance requirements of S5.2.1, S5.2.2, and S5.2.3.
176 FMVSS No. 208, “Occupant crash protection.” FMVSS No. 208 was written such that it permited such switches only on vehicles configured with no back seat or a back seat too small to accommodate a rear-facing child restraint system. This was an interim step to allow advanced air bag technology to mature and be fully implemented.
NHTSA and FMCSA realize a switch or other method that could deactivate a vehicle's AEB system could be useful in some circumstances. There might be some heavy vehicle design or aftermarket equipment installations where the configuration of the vehicle could potentially interfere with the AEB sensing system. For example, a snowplow might be attached in a manner that obstructs an AEB sensor. Some vehicles may have uses where an AEB system may be incompatible with its operating environment, for example, logging operations or other on/off road environments.
Special conditions could be addressed by drafting the standard to allow manual deactivation under limited circumstances when the system is compromised. However, an FMVSS in which deactivation of the system is easily accomplished would likely reduce the safety benefit of the proposed rule. NHTSA seeks comments on the merits of and need for manual deactivations of AEB systems. If the standard were to permit a deactivation mechanism of some sort, how could NHTSA allow for deactivations while ensuring the mechanism would not be abused or misused by users? Alternatively, NHTSA is interested in comments on the approach of the standard's restricting the automatic deactivation of the AEB system generally but providing for special conditions in which the vehicle is permitted to automatically deactivate or otherwise restrict braking authority given to the AEB system.
NHTSA seeks comment on the merits of various performance requirements related to manual deactivation switches for AEB systems. The agency seeks comment on the appropriate performance requirements if the agency were to permit the installation of a manually operated deactivation switch. Such requirements might include limitations such that the default position of the switch be “AEB ON” with each cycle of the starting system or that the deactivation functionality be limited to specific speeds.
H. System Documentation
NHTSA seeks comment on alternate regulatory approaches that might be appropriate for regulating complex systems that depend heavily on software performance. FMVSS have historically included requirements that can be inspected or tested by the agency to verify compliance. In some cases, such as in FMVSS No. 126, the agency has required manufacturers to maintain technical documentation available for agency review upon request to ensure that electronic stability control systems were designed to mitigate vehicle understeer (49 CFR 571.126 S5.6). The agency established this requirement in the absence of suitable test procedures for evaluating understeer.
In the case of AEB, there are similar limits to testing systems in controlled environments. AEB systems operating on roadways will be subject to many scenes and stimuli that are not present on a test track— e.g., precipitation, lighting, roadway curvature and elevation changes, signage, other road users, animals, debris, etc.—and these scenes and stimuli could potentially influence real world effectiveness of AEB systems. The agency seeks comment on documentation requirements that may be effective in encouraging real world effectiveness ( e.g., maximizing true positive rate and minimizing false positive rate) and in ensuring that AEB systems are developed and maintained in a manner that minimizes performance risks.
The agency is considering requirements for manufacturers to document a risk-based design approach identifying and mitigating reasonably foreseeable risks alongside configuration management records of all software/hardware updates performed by the manufacturer. Manufacturers would also need to disclose certain servicing and system limitation requirements and make AEB-related data stored in vehicles available. Examples of requirements under consideration include:
• Manufacturers must establish and maintain procedures that provide a risk-based approach in designing, implementing, and (if applicable) updating each system required under this standard. Manufacturers must maintain documentation over the system lifetime detailing the outcome of the risk-based approach taken to ensure the safety of such systems.
• Where servicing is required to maintain system performance, each manufacturer must establish and maintain instructions and procedures for performing and verifying that the servicing meets the specified requirements.
• Certain information must be disclosed to consumers at the time of first sale in a single document such as an owner's manual:
○ If servicing requirements include periodic maintenance, the maintenance schedule must be identified.
○ Manufacturers must include a statement describing the limitations of AEB and explaining that AEB is an emergency system that does not replace the need for normal actuation of the service brakes.
• Each manufacturer must maintain documentation that captures the full system configuration, including all hardware, software, and firmware, for each vehicle at the time of first sale and at the time of any update to the system configuration by the manufacturer.
• Each AEB system or a system that communicates with the AEB system must store information logging at least the last three AEB activation events or all AEB activation events occurring within the past three drive cycles.
• The vehicle must store the status of the AEB system (active, inactive, disabled, warning, engaged, disengaged, malfunctioning, etc.).
NHTSA believes that manufacturers that have installed AEB systems in their fleet may already be meeting many of the documentation requirements above. The agency seeks comment on the suitability of these requirements and on any changes that manufacturers would have to introduce in their internal processes and consumer-facing documentation ( e.g., owner's manuals). NHTSA is interested in learning whether manufacturers find discrepancies between real-world performance and data collected on test tracks with surrogate vehicles.
I. ESC Performance Test
This proposal would require nearly all heavy vehicles to have an ESC system that meets the equipment requirements, general system operational capability requirements, and malfunction detection requirements of FMVSS No. 136. However, this proposal would not require vehicles not currently required to have ESC systems to meet any test track performance requirements for ESC systems because NHTSA is conscious of the potential testing burden on small businesses and the multi-stage vehicle manufacturers involved in class 3 through 6 vehicle production. NHTSA requests comments on whether the agency should establish performance requirements for ESC for all vehicles covered by this proposal. If ESC performance requirements would be appropriate, NHTSA seeks comment on which regulatory tests and requirements would be appropriate for the class 3–8 vehicles which this notice proposes to make applicable to FMVSS No. 136. NHTSA also seeks comment on whether manufacturers of these vehicles should have the option to certify to FMVSS No. 126 or FMVSS No. 136, whether a new ESC test procedure should be developed for some or all of these vehicles, or whether NHTSA should give the manufacturer the option to choose the ESC standard to which to certify.
NHTSA conducted some limited ESC testing for class 3–6 vehicles, as part of research efforts during the development of FMVSS No. 136, which was established in 2015, and as part of its recent AEB testing. 177 The ESC testing performed has however been sufficient to indicate that the test procedures currently established in FMVSS Nos. 126 and 136 would require modification in order to better suit class 3 through 6 vehicles. For example, the vehicle test speeds specified in FMVSS No. 136, which are designed to induce ESC activation in class 7 and 8 trucks and buses at speeds under 48 km/h (30 mph), did not induce ESC activation in the vehicles that were tested. This testing indicates that the maximum test speeds and speed reduction requirements would likely need to be modified.
177 This information is available in “ESC Track Test Data for Class 3–6 Vehicles,” which has been placed in the docket identified in the heading of this NPRM.
J. Severability
The issue of severability of FMVSSs is addressed in 49 CFR 571.9. It provides that if any FMVSS or its application to any person or circumstance is held invalid, the remainder of the part and the application of that standard to other persons or circumstances is unaffected. NHTSA seeks comment on the issue of severability.
VIII. Vehicle Test Device
NHTSA has proposed the same vehicle test device described below for use in the proposed requirements for AEB for light vehicles. An identical discussion of the vehicle test device appears in the NPRM proposing the FMVSS for light vehicles.
A. Description and Development
To ensure repeatable and reproducible testing that reflects how a subject vehicle would be expected to respond to an actual vehicle in the real world, this proposal includes broad specifications for a vehicle test device to be used as a lead vehicle or pass through vehicle during testing. NHTSA is proposing that the vehicle test device be based on certain specifications defined in ISO 19206–3:2021, “Road vehicles—Test devices for target vehicles, vulnerable road users and other objects, for assessment of active safety functions—Part 3: Requirements for passenger vehicle 3D targets.” 178 The vehicle test device is a tool that NHTSA proposes to use to facilitate the agency's compliance tests to measure the performance of AEB systems required by the proposed FMVSS. This NPRM describes the vehicle test device that NHTSA would use.
178 https://www.iso.org/standard/70133.html. May 2021.
The surrogate vehicle NHTSA currently uses in its research testing is the Global Vehicle Target (GVT). The GVT is a full-sized, harmonized surrogate vehicle developed to test crash avoidance systems while addressing the limitations of earlier generation surrogate vehicles. To obtain input from the public and from industry stakeholders, NHTSA participated in a series of five public workshops and three radar tuning meetings between August 2015 and December 2016. These workshops and meetings provided representatives from the automotive industry with an opportunity to inspect, measure, and assess the realism of prototype surrogates during the various stages of development. Workshop and meeting participants were permitted to take measurements and collect data with their own test equipment, which they could then use to provide specific recommendations about how the surrogate vehicle's appearance, to any sensor, could be improved to increase realism.
After feedback from automotive vehicle manufacturers and suppliers was incorporated into an earlier design of the GVT, a series of high-resolution radar scans were performed by the Michigan Tech Research Institute (MTRI) under NHTSA contract. These measurements provided an independent assessment of how the radar characteristics of the GVT compared to those from four real passenger cars. 179 This study found that the GVT has generally less radar scatter than the real vehicles to which it was compared. However, MTRI found that “even though the [GVT] may more often reflect a greater amount of energy than the [real] vehicles, it is not exceeding the maximum energy of the returns from the vehicles. Thus, a sensor intended for the purpose of detecting vehicles should perform well with the [GVT].” 180
179 The comparison passenger cars used were a 2008 Hyundai Accent, a 2004 Toyota Camry, a 2016 Ford Fiesta hatchback, and a 2013 Subaru Impreza.
180 Buller, W., Hart, B., Aden, S., and Wilson, B. (2017, May) “Comparison of RADAR Returns from Vehicles and Guided Soft Target (GST),” Michigan Technological University, Michigan Tech Research Institute. Docket NHTSA–2015–0002–0007.
NHTSA also performed tests to determine the practicality of using the GVT for test-track performance evaluations by examining how difficult it was to reassemble the GVT after it was struck in a test. Using a randomized matrix designed to minimize the effect of learning, these tests were performed with teams of three or five members familiar with the GVT reassembly process. NHTSA found that reassembly of the GVT on the robotic platform takes approximately 10 minutes to complete; however, additional time is often required to re-initialize the robotic platform GPS afterwards. 181
181 Snyder, Andrew C. et al., “A Test Track Comparison of the Global Vehicle Target (GVT) and NHTSA's Strikeable Surrogate Vehicle (SSV),” July 2019. https://rosap.ntl.bts.gov/view/dot/41936.
Finally, NHTSA conducted its own crash imminent braking tests to compare the speed reduction achieved by three passenger cars as they approached the GVT, compared to the Strikable Surrogate Vehicle (SSV), the surrogate vehicle NHTSA currently uses for its NCAP AEB tests. These tests found that any differences that might exist between the GVT and the SSV were small enough to not appreciably influence the outcome of vehicle testing. 182
182 Id.
When used during AEB testing, the GVT is secured to the top of a low- profile robotic platform. The robotic platform is essentially flat and is movable and programmable. The vehicle test device's movement can be accurately and repeatably defined and choreographed with the subject vehicle and testing lane through the use of data from the robotic platform's on-board inertial measurement unit, GPS, and closed-loop control facilitated by communication with the subject vehicle's instrumentation. The shallow design of the robotic platform allows the test vehicle to drive over it. The GVT is secured to the top of the robotic platform using hook-and-loop fastener attachment points, which allow the pieces of the GVT to easily and safely break away without significant harm to the vehicle being tested if struck.
The internal frame of the GVT is constructed primarily of vinyl-covered foam segments held together with hook-and-loop fasteners. The GVT's exterior is comprised of multiple vinyl “skin” sections designed to provide the dimensional, optical, and radar characteristics of a real vehicle that can be recognized as such by camera and radar sensors. 183 If the subject vehicle impacts the GVT at low speed, the GVT is typically pushed off and away from the robotic platform without breaking apart. At higher impact speeds, the GVT breaks apart as the subject vehicle essentially drives through it.
183 “A Test Track Comparison of the Global Vehicle Target (GVT) and NHTSA's Strikeable Surrogate Vehicle,” DOT HS 812–698.
B. Specifications
The most recent, widely-accepted iteration of vehicle test device specifications is contained in ISO 19206–3:2021. 184 Using data collected by measuring the fixed-angle/variable-range radar cross section for several real vehicles, ISO developed generic “acceptability corridors,” which are essentially boundaries that the vehicle test device's radar cross section must fit within to be deemed representative of a real vehicle. 185 All vehicles that ISO tested have radar cross section measurements that fit within the boundaries set forth in the ISO standard.
184 Road vehicles—Test devices for target vehicles, vulnerable road users and other objects, for assessment of active safety functions—Part 3: Requirements for passenger vehicle 3D targets.
185 The vehicles tested to develop the ISO standard are: 2016 BMW M235i, 2006 Acura RL, 2019 Tesla Model 3, 2017 Nissan Versa, 2018 Toyota Corolla, 2019 Ford Fiesta.
This proposal would incorporate by reference ISO 19206–3:2021 into NHTSA's regulations and specify that the vehicle test device meets several specifications in ISO 19206–3:2021, in addition to other specifications identified by NHTSA. Because the GVT was considered during the development of ISO 19206–3:2021, the GVT would meet the standard's specifications. However, should the design of the GVT change or a new vehicle test device be developed, reference to the more general specifications of ISO 19206–3:2021 should ensure that NHTSA is able to test with such other vehicle test devices and should also ensure that such vehicle test devices have properties needed by an AEB system to identify it as a motor vehicle.
The vehicle test device's physical dimensions are proposed to be consistent with those of the subcompact and compact car vehicle class. The specific range of dimensions in this proposal for individual surfaces of the vehicle test device are incorporated from ISO 19206–3:2021, Annex A, Table A.4. These include specifications for the test device's width and the placement of the license plate, lights, and reflectors relative to the rear end of the vehicle test device.
The vehicle test device is proposed to have features printed on its surface to represent features that are identifiable on the rear of a typical passenger vehicle, such as tail lamps, reflex reflectors, windows, and the rear license plate. The proposed color ranges for the various surface features, including tires, windows, and reflex reflectors are incorporated from ISO 19206–3:2021, Annex B, Tables B.2 and B.3. Table B.2 specifies the colors of the tires, windows, and reflectors, which reflect the colors observed the in the real world. The color of the exterior of the vehicle is specified to be a range representing the color white, which provides a high color contrast to the other identifiable features. White is also a common color for motor vehicles. 186 The proposed reflectivity ranges for the various features on the vehicle test device are incorporated from ISO 19206–3:2021, Annex B, Table B.1. Table B.3 specifies the recommended minimum, mean, and maximum color range for the white body, specifically the outer cover.
186 Globally, white was the most popular color for light vehicles in 2021. https://gmauthority.com/blog/2022/02/white-was-the-most-popular-car-color-again-in-2021/#:~:text=According%20to%20PPG%2C%2035%20percent,by%20silver%20at%2011%20percent.
Because many AEB systems rely on radar sensors in some capacity to identify the presence of other vehicles, the vehicle test device must have a radar cross section that would be recognized as a real vehicle by an AEB system. In particular, the vehicle test device must have a radar cross section consistent with a real vehicle when approached from the rear over a range of distances.
NHTSA is proposing that the radar cross section of the vehicle test device fall within an “acceptability corridor” when measured using an automotive-grade radar sensor. This acceptability corridor would be defined by the upper and lower boundaries specified by ISO 19206–3:2021, Annex C, Equations C.1 and C.2, using the radar cross section boundary parameters defined in ISO 19206–3:2021, Annex C, Table C.3 for a fixed viewing angle of 180 degrees. NHTSA is aware that, unlike some predecessor specification documents such as Euro NCAP Technical Bulletin 025 from May 2018, ISO 19206–3:2021 does not specify that the radar cross section measurements be verified using a specific model of radar. Rather, the ISO standard specifies that the radar sensor used have certain specifications and operational characteristics. NHTSA's proposal similarly does not specify that the vehicle test device's initial radar cross section be measured with a specific model or brand of radar. NHTSA only proposes that the radar sensor used to validate the radar cross section operate within the 76–81 GHz bandwidth, have a horizontal field of view of at least 10 degrees, a vertical field of view of at least 5 degrees, and a range greater than 100 m. Additionally, NHTSA's proposal does not specify that the VTD's radar cross section during in-the-field verifications be performed to objectively assess whether the radar cross section still falls within the acceptability corridor. NHTSA seeks comment about whether use of the optional field verification procedure provided in ISO 19206–3:2021, Annex E, section E.3 should be used.
Because the test procedures proposed in this rule only involve rear-end approaches by the subject vehicle, NHTSA is at this time only proposing to establish specifications applicable for the rear end of the vehicle test device. NHTSA seeks comment on whether the specifications for the vehicle test device should include all sides of the vehicle. If NHTSA were to include, in a final rule, specifications for all sides of a vehicle test device, NHTSA anticipates that those specifications would also be incorporated from ISO 19206–3:2021.
C. Alternatives Considered
One alternative test device that NHTSA considered for use in this proposal was the agency's self-developed Strikable Surrogate Vehicle (SSV) device, which NHTSA currently uses in its NCAP testing of AEB performance. NHTSA adopted the use of the SSV as part of its 2015 NCAP upgrade, under which the agency began testing AEB performance. 187 The SSV resembles the rear section of a 2011 Ford Fiesta hatchback. The SSV is constructed primarily from a rigid carbon fiber mesh, which allows it to maintain a consistent shape over time (unless damaged during testing). To maximize visual realism, the SSV shell is wrapped with a vinyl material that simulates paint on the body panels and rear bumper, and a tinted glass rear window. The SSV is also equipped with a simulated United States specification rear license plate. The taillights, rear bumper reflectors, and third brake light installed on the SSV are actual original equipment from a production vehicle. NHTSA testing shows that AEB systems will recognize the SSV and will respond in a way that is comparable to how they would respond to an actual vehicle. 188
187 80 FR 68604.
188 80 FR 68607.
While the SSV and GVT are both recognized as real vehicles by AEB systems from the rear approach aspect, the SSV has several disadvantages. The foremost disadvantage of the SSV is how easily it can be irreparably damaged when struck by a subject vehicle during testing, particularly at high relative velocities. While NHTSA has tried to address this issue by attaching a foam bumper to the rear of the SSV to reduce the peak forces resulting from an impact by the subject vehicle, the SSV can still easily be damaged to a point where it can no longer be used if the relative impact speed is sufficiently high (greater than 40 km/h (25 mph)); this speed is much lower than the maximum relative impact speed of 80 km/h (50 mph) potentially encountered during the AEB tests performed at the maximum relative speeds proposed in this notice). Also, unlike the GVT, which has its movement controlled by precise programming and closed loop control, the SSV moves along a monorail secured to the test surface, which may be visible to a camera-based AEB system.
In addition to the vehicle test device specifications, NHTSA seeks comment on specifying a set of real vehicles to be used as vehicle test devices in AEB testing. UN ECE Regulation No. 152 specifies that the lead vehicle be either a regular high-volume passenger sedan or a “soft target” meeting the specifications of ISO 19206–1:2018. 189 UN ECE regulation does not require the use of real vehicles as targets, but rather offers them as an alternative to manufacturers to homologate their systems, at their choice. Although NHTSA has tentatively concluded that the specification in UN ECE Regulation No. 152 of any high-volume passenger sedan is not sufficiently specific for an FMVSS, NHTSA seeks comment on whether it should create a list of vehicles from which NHTSA could choose a lead vehicle for testing. Unlike the UN ECE regulation, which provides flexibility to manufacturers, inclusion of a list of vehicles would provide flexibility to the agency in the assessment of the performance of AEB systems. Such a list would be in addition to the vehicle test device proposed in this document, to provide assurance of vehicle performance with a wider array of lead vehicles. For example, the list could include the highest selling vehicle models in 2020.
189 U.N. Regulation No. 152, E/ECE/TRANS/505/Rev.3/Add.151/Amend.1 (Nov. 4, 2020), available at https://unece.org/fileadmin/DAM/trans/main/wp29/wp29regs/2020/R152am1e.pdf.
Using actual vehicles has various challenges, including the potential for risk to individuals conducting the tests and damage to the vehicles involved, and assuring a safe testing environment that could encounter high energy collisions between real vehicles in cases of poor AEB system performance or AEB or test equipment malfunctions. NHTSA seeks comment on the utility and feasibility of test laboratories safely conducting AEB tests with real vehicles, such as through removing humans from test vehicles and automating scenario execution, and how laboratories would adjust testing costs to factor in the risk of damaged vehicles.
Beyond the practical safety limits and cost of testing described above, managing a list of relevant lead vehicles would require the standard to be updated periodically to keep pace with the vehicle fleet and to ensure that lead vehicles are available years after a final rule. NHTSA seeks comments on the merits and potential need for testing using real vehicles, in addition to using a vehicle test device, as well as challenges, limitations, and incremental costs of such.
IX. Proposed Compliance Date Schedule
NHTSA proposes a two-tiered phase-in schedule for meeting the new standard. For heavy vehicles currently subject to FMVSS No. 136, any vehicle manufactured on or after the first September 1 that is three years after the date of publication of the final rule must meet the proposed heavy vehicle AEB standard. To illustrate, if the final rule were published on October 1, 2023, the compliance date would be September 1, 2027. For heavy vehicles not currently subject to FMVSS No. 136, with some exclusions, those manufactured on or after the first September 1 that is four years after the date of publication of the final rule must meet the amendments to FMVSS No. 136 that would require ESC systems and the proposed AEB requirements. In the provided example of a final rule published on October 1, 2023, that date would be September 1, 2028. Small-volume manufacturers, final-stage manufacturers, and alterers would be provided an additional year, added to the dates above, to meet the requirements of this proposal.
Consistent with 49 U.S.C. 30111(d), NHTSA has tentatively concluded that good cause exists for this proposal to take effect more than one year after publication of a final rule because it would not be feasible for all heavy vehicles to be equipped with AEB systems that meet the proposed performance requirements within one year. Furthermore, NHTSA seeks comments on whether this proposed phase-in schedule appropriately addresses challenges to the implementation of AEB for specific categories of heavy vehicles. The agency is particularly interested in information about single-unit trucks with permanently installed work-performing equipment installed on the front of or extending past the front of the vehicle ( e.g., auger trucks, bucket trucks, cable reel trucks, certain car carriers, etc.), where AEB sensors may be located. NHTSA seeks comments to discern the best way to implement the applicability of AEB on class 3–6 single-unit trucks, considering all scenarios such as vehicle configuration, vehicle service applicability, and cargo type, which, among other factors, can affect vehicle dynamics and drivability. The manufacture of single-unit trucks is more complex than that of truck tractors due to wider variations in vehicle weight, wheelbase, number of axles, center of gravity height, and cargo type. These factors, and others, bear on the calibration and performance of ESC. For example, ESC system design depends on vehicle dynamics characteristics, such as the total vehicle weight and location of that weight (center of gravity), which will differ depending on the final vehicle configuration. Because ESC has been a prerequisite for voluntary adoption of AEB, single-unit trucks not having had ESC requirements suggests that AEB implementation has been slower and that there is a need for effective date flexibility.
NHTSA is also aware that many, if not most, manufacturers of single-unit trucks are final-stage manufacturers, which are typically small businesses. To provide more flexibility to small businesses to meet the proposed rule, this NPRM proposes to permit small-volume manufacturers, final-stage manufacturers, and alterers an additional year to meet the requirements of the final rule. The additional time would provide flexibility to the manufacturers to install ESC and collaborate with AEB suppliers to meet the proposed requirements.
FMCSA proposes that vehicles currently subject to FMVSS No. 136 ( i.e., those manufactured on or after August 1, 2019, the initial compliance date for FMVSS No. 136) would be required to comply with FMCSA's proposed ESC regulation on the final rule's effective date. Vehicles with a GVWR greater than 4,536 kilograms (10,000 pounds) not currently subject to FMVSS No. 136 would be required to meet the proposed ESC regulation on or after the first September 1 that is five years after the date of publication of the final rule.
FMCSA proposes that, for vehicles currently subject to FMVSS No. 136, any vehicle manufactured on or after the first September 1 that is three years after the date of publication of the final rule would be required to meet the proposed heavy vehicle AEB standard. FMCSA proposes that vehicles with a gross vehicle weight rating greater than 4,536 kilograms (10,000 pounds) not currently subject to FMVSS No. 136 and vehicles supplied to motor carriers by small-volume manufacturers, final-stage manufacturers, and alterers would be required to meet the proposed heavy vehicle AEB standard on or after the first September 1 that is five years after the date of publication of the final rule.
This proposed implementation timeframe simplifies FMCSR training and enforcement because the Agency expects a large number of final stage manufacturers supplying vehicles to motor carriers in the category of vehicles with a gross vehicle weight rating greater than 4,536 kilograms (10,000 pounds).
FMCSA will require the ESC and AEB systems to be inspected and maintained in accordance with §396.3.
X. Retrofitting
The Secretary has the statutory authority to promulgate safety standards for commercial motor vehicles and equipment subsequent to initial manufacture. The Secretary has delegated authority to NHTSA, in coordination with FMCSA, to promulgate safety standards for commercial motor vehicles and equipment subsequent to initial manufacture when the standards are based upon and similar to an FMVSS. 190
190 Sec. 101(f) of Motor Carrier Safety Improvement Act of 1999 (Pub. L. 106–159; Dec. 9, 1999). 49 CFR 1.95(c).
NHTSA considered, but decided against, proposing to require retrofitting of in-service vehicles with GVWR greater than 4,536 kg (10,000 lbs.) with AEB systems. NHTSA believes that retrofitting in-service vehicles with AEB systems could be very complex and costly because of the integration between an AEB system and the vehicles' chassis, engine, and braking systems. There may be changes that would have to be made to an originally manufactured vehicle's systems that interface with an AEB system, such as plumbing for new air brake valves and lines and a new electronic control unit for a revised antilock braking system and a new electronic stability control system. NHTSA might also have to develop and establish additional requirements to ensure that AEB control components on in-service (used) vehicles are at an acceptable level of performance for a compliance test of AEB. This would be likely given the uniqueness of each vehicle's maintenance condition, particularly for items such as tires and brake components, which are foundational for AEB performance (and which are subject to high demands of wear-and-tear).
Nonetheless, although this NPRM does not propose requiring heavy vehicles to be equipped with AEB subsequent to initial manufacture, NHTSA requests comment on the following issues related to retrofitting to learn more about the technical and economic feasibility of a retrofit requirement going forward.
• The complexity, cost, and burdens of a requirement to retrofit in-service vehicles with AEB.
• The changes that would be needed to an originally manufactured vehicle's systems that interface with an AEB system, such as plumbing for new air brake valves and lines and a new electronic control unit for a revised ABS and a new ESC system.
• Approaches NHTSA could take to identify portions of the on-road fleet to which a retrofit requirement could apply. For a retrofitting requirement, should the requirement distinguish among in-service vehicles based on the vehicles' date of manufacture? Is it reasonable to assume that older in-service vehicles would have greater challenges to meet a retrofit requirement? What should, for example, the original manufacture date be of vehicles that should be subject to a retrofit requirement?
• Should there be provisions to ensure that the various components related to AEB performance ( e.g., brakes and tires) are at an acceptable level of performance for a compliance test, given the uniqueness of the maintenance condition for vehicles in service, especially for items particularly subject to wear-and-tear ( e.g., brake components and tires)?
• Relatedly, would it be warranted to vary the performance requirements for retrofitted vehicles, so that the requirements would be less stringent for used vehicles? If yes, what would be appropriate level of stringency? If not, how can the requirements be adjusted for in-service vehicles?
• NHTSA requests comment on other options the agency could take to identify portions of the on-road fleet to which a retrofit requirement should apply. Are there other voluntary improvements that heavy vehicle operators would consider in attaining the benefits provided by AEB for their in-service vehicles?
XI. Summary of Estimated Effectiveness, Cost, Benefits, and Comparison of Regulatory Alternatives
A. Crash Problem
NHTSA's assessment of available safety data indicates that between 2017 and 2019, an average of approximately 60,000 crashes occurred annually in which a heavy vehicle rear-ended another vehicle. These crashes resulted in an annual average of 388 fatalities, approximately 30,000 non-fatal injuries, and 84,000 property-damage-only vehicles. Additionally, class 3–6 heavy vehicles were involved in approximately 17,000 rollover and loss of control crashes annually. These crashes resulted in 178 fatalities, approximately 4,000 non-fatal injuries, and 13,000 property-damage-only vehicles annually. In total, these rear-end, rollover, and loss of control crashes add up to 77,000 annually, which represent 1.2 percent of all police-reported crashes and over 14 percent of all crashes involving heavy vehicles. In total, these crashes resulted in 566 fatalities and 34,000 non-fatal injuries. These crashes also damaged 97,000 vehicles in property-damage-only crashes.
B. AEB System Effectiveness
NHTSA evaluated the effectiveness of AEB indicates based on the efficacy of the system in avoiding a rear-end crash. This relates to the proposed requirement that a vehicle avoid an imminent rear- end collision under a set of test scenarios. One method of estimating effectiveness would be to perform a statistical analysis of real-world crash data and observe the differences in statistics between heavy vehicles equipped with AEB and those not equipped with AEB. However, this approach is not feasible currently due to the low penetration rate of AEB in the on-road vehicle fleet. Consequently, NHTSA estimated the effectiveness of AEB systems using performance data from the agency's vehicle testing. Effectiveness was assessed against all crash severity levels collectively, rather than for specific crash severity levels ( i.e., minor injury versus fatal).
The AEB effectiveness estimates were derived from performance data from four vehicles tested by NHTSA, and the agency is continuing its effort to test a larger variety of vehicles to further evaluate AEB system performance. These vehicles were subject to the same test scenarios (stopped lead vehicle, slower-moving lead vehicle, and decelerating lead vehicle) that are proposed in this notice, and effectiveness estimates are based on each vehicle's capacity to avoid a collision during a test scenario. For example, if a vehicle avoided colliding with a stopped lead vehicle in four out of five test runs, its effectiveness in that scenario would be 80 percent. The test results for each vehicle were combined into an aggregate effectiveness value by vehicle class range and crash scenario, as displayed in Table 17.
| Vehicle class range | Stopped lead vehicle | Slower-moving lead vehicle | Decelerating lead vehicle |
|---|---|---|---|
| 7–8 | 38.5 | 49.2 | 49.2 |
| 3–6 | 43.0 | 47.8 | 47.8 |
As shown in Table 17, after aggregating class 7 and class 8 together, AEB would avoid 38.5 percent of rear-end crashes for the stopped lead vehicle scenario, and 49.2 percent of slower-moving and decelerating lead vehicle target crashes. For class 3–6, AEB is 43.0 percent effective against stopped lead vehicle crashes and 47.8 percent against slower-moving and decelerating lead vehicle target crashes. These effectiveness values are the values used for assessing the benefits of this proposed rule. Further detail on the derivation of AEB effectiveness can be found in the PRIA accompanying this proposal.
C. ESC System Effectiveness
ESC effectiveness rates were adopted from those estimated in the final regulatory impact analysis for the final rule implementing heavy vehicle ESC requirements in FMVSS No. 136. 191 In that final rule, a range of ESC crash avoidance effectiveness was established for the first-event rollover crashes but only a single-point estimate was established for loss of control crashes. ESC was estimated to be 40 to 56 percent effective at preventing rollover crashes and 14 percent effective at preventing loss-of-control crashes. For simplicity, and to correspond with the single-point estimate for loss of control crashes, the PRIA used the mid-point between the lower and upper bounds of the estimated range as the effectiveness for rollovers.
191 Final Regulatory Impact Analysis, FMVSS No. 136 Electronic Stability Control on Heavy Vehicles, June 2014, Docket No. NHTSA–2015–0056.
The propensity for vehicles to experience rollover and loss-of-control crashes is influenced by their body type and center of gravity, and the implementation of ESC varies. ESC was estimated to be less effective on class 7 and 8 vehicles than it was on light vehicles, especially for rollover crashes. 192 Vehicle characteristics for class 3 through 6 vehicles range between that of light trucks and vans and class 7 and 8 vehicles, it would be plausible to assume that ESC effectiveness would be between the effectiveness estimated in the FMVSS No. 126 and FMVSS No. 136 final rules. Nevertheless, this NPRM uses the effectiveness estimates from the FMVSS No. 136 final rule.
192 Dang, J. (July 2007) Statistical Analyzing of the Effectiveness of Electronic Stability Control (ESC) Systems—Final Report, DOT HS 810 794, Washington, DC, https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/810794.
| Vehicle class range | Rollover | Loss of control |
|---|---|---|
| 3–6 | 48.0 | 14.0 |
D. Avoided Crashes and Related Benefits
Considering the annual heavy vehicle rear-end, rollover, and loss of control crashes, as well as the effectiveness of AEB and ESC at avoiding these crashes, the proposed rule would prevent an estimated 19,118 crashes, 155 fatalities, and 8,814 non-fatal injuries annually. In addition, the proposed rule would eliminate an estimated 24,828 PDOVs annually. The benefit estimates include assumptions that likely result in the underestimation of the benefits of this proposal because it only reflects the benefits from crash avoidance. That is, the benefits only reflect those resulting from crashes that are avoided as a result of the AEB and ESC performance proposed. It is likely that AEB will also reduce the severity of crashes that are not prevented. Some of these crashes may include fatalities and significant injuries that will be prevented or mitigated by AEB.
Table 19 tabulates these benefits in two ways, one by vehicle class and one by technology. These benefits are measured for the portion of the vehicle fleet that has not voluntarily adopted AEB prior to the NPRM. These benefits also assume reduced performance under dark or hazardous weather conditions. The estimated annual benefits would be the undiscounted lifetime benefits once the proposal is fully implemented (four years after publication of a final rule). The undiscounted lifetime benefits for each new model year of vehicles would equal the annual benefits of the on-road fleet when that fleet has been fully equipped with this technology. The actual annual benefits will increase each year as the on-road vehicle fleet is replaced with vehicles that would be subject to the proposed requirements.
| Crashes | Fatalities | Non-fatal injuries | PDOVs | |
|---|---|---|---|---|
| By Vehicle Class: | ||||
| Class 7–8 | 5,691 | 40 | 2,822 | 7,958 |
| Class 3–6 | 13,427 | 115 | 5,992 | 16,870 |
| Total | 19,118 | 155 | 8,814 | 24,828 |
| By Technology: | ||||
| AEB | 16,224 | 106 | 8,058 | 22,713 |
| ESC | 2,894 | 49 | 756 | 2,115 |
| Total | 19,118 | 155 | 8,814 | 24,828 |
E. Technology Costs
The AEB system is estimated to cost $396 per vehicle. The unit cost includes all the components, labor cost for training customers, tuning the system to ensure the performance of AEB, and the AEB malfunction telltale. The component unit costs were based on the agency's 2018 weight and teardown study, which accounted for scale efficiencies in production and labor. 193 The cost for an ESC system would range from $320 to $687, which was calculated by adjusting the assumed unit cost for ESC in the FMVSS No. 136 final rule for inflation. 194 Therefore, for vehicles that need both AEB and ESC, the total unit cost would range from $716 to $1,083 per affected vehicle. 195 The total number of affected vehicles including trucks and buses are estimated to be 569,792 units annually: 164,405 units for class 7–8 and 405,387 units for class 3–6 vehicles. The total cost corresponding to the estimated annual benefits is estimated to be $353 million ($288 million for class 7–8 and $65 million for class 3–6). The affected vehicle units were based on the 10 year average of units sold between 2011 and 2020. 196
193 “Cost and Weight Analysis of Heavy Vehicle Forward Collision Warning (FCW) and Automatic Emergency Braking (AEB) Systems for Heavy Trucks,” September 27, 2018, Contract number: DTNH2216D00037, Task Order: DTNH2217F00147.
194 Final Regulatory Impact Analysis, FMVSS No. 136 Electronic Stability Control on Heavy Vehicles, June 2014, Docket No. NHTSA–2015–0056.
195 AEB and ESC unit cost estimates are the additional component costs for the vehicles without the systems. Specifically, AEB cost is the additional hardware to those vehicles that already had ESC.
196 Due to data constraints, the average is only available for trucks and school buses. The annual sales volume for motorcoaches and transit buses was based on the agency's estimate for earlier final rules and other sources. Please consult Appendix B of the PRIA for details.
F. Monetized Benefits
Table 20 summarizes the primary benefit cost estimates, which include the annual total cost, total monetized savings, cost per equivalent life saved, and net benefits of the proposed rule under three and seven percent discount rates. Monetized savings are measured by comprehensive costs, which include the tangible costs of reducing fatalities and injuries such as savings from medical care, emergency services, insurance administration, workplace costs, legal costs, congestion and property damage, lost productivity as well as nontangible cost of quality life lost. The nontangible cost components were based on the value of statistical life of $11.8 million. 197
197 Departmental Guidance on Valuation of a Statistical Life in Economic Analysis, Effective Date: Friday, March 4, 2022, https://www.transportation.gov/office-policy/transportation-policy/revised-departmental-guidance-on-valuation-of-a-statistical-life-in-economic-analysis.
The proposed rule would generate a net benefit of $1.81 billion to $2.58 billion, annually under 3 and 7 percent discount rates. The proposed rule would be cost-effective given that the highest estimated net cost per fatal equivalent would be $0.50 million, a value less than $12.2 million (the comprehensive cost of a fatality). The negative net cost per fatal equivalent for the 3 percent discount rate indicates that the savings from reducing traffic congestion and property damage is greater than the total cost of the proposed rule. Net benefits are likely to be even higher given that the estimates only include benefits from crashes prevented by AEB, but do not include benefits from crashes for which AEB mitigates the severity of, but does not prevent.
| Discount rates | Annual cost * | Monetized savings | Net cost per fatal equivalent | Net benefits |
|---|---|---|---|---|
| * Annual cost is not discounted because it is paid at vehicle purchase. | ||||
| ** At a three percent discount rate, savings from reduced traffic congestions and property damages outweigh the cost, resulting in negative net cost per equivalent life. The negative value indicates cost-effectiveness. | ||||
| 3 Percent | $353.3 | $2,937.0 | **−$0.12 | $2,583.7 |
| 7 Percent | 353.3 | 2,160.4 | 0.50 | 1,807.1 |
G. Alternatives
NHTSA has identified and assessed alternatives to the preferred alternative set forth in the proposed regulatory text. The agency considered two primary alternatives to the proposed rule.
The first alternative would not require AEB or ESC on vehicles not currently subject to FMVSS No. 136. Eliminating the requirement would reduce the burden on heavy vehicle manufacturers associated with installing AEB and ESC on vehicles with different body types, but would result in significantly fewer safety benefits and lives saved. A summary of the costs, benefits, and cost-effectiveness associated with Alternative 1 is in Table 21.
| Annual cost * | Monetized savings | Net cost per fatal equivalent | Net benefits | |
|---|---|---|---|---|
| * Annual cost is not discounted because it is paid at vehicle purchase. | ||||
| ** At a three percent discount rate, savings from reduced traffic congestions and property damages outweigh the cost, resulting in negative net cost per equivalent life. The negative value indicates cost-effectiveness. | ||||
| 3 Percent Discount | $65.10 | $874.59 | **−$1.00 | $809.50 |
| 7 Percent Discount | 65.10 | 662.23 | −0.66 | 597.10 |
The second alternative would require all class 3–6 heavy vehicles to have AEB and ESC within four years, as with the primary agency proposal. However, this alternative would include a one-year phase-in period beginning three years after publication of the final rule in which 50 percent of class 3–6 vehicles would be required to install AEB and ESC. This alternative was considered because it has the potential to save more lives sooner. This alternative would have the same annual cost, savings, net cost per fatal equivalent, and net benefits as the primary proposal. However, this alternative would result in added benefits from vehicles manufactured in the phase-in period. The estimated total additional benefits associated with alternative 2 above the primary estimate are summarized in Table 22.
| Percent discount | 3 | 7 |
|---|---|---|
| Net Additional Benefit | $830.5 | $566.4 |
Detailed benefit-cost calculations of these alternatives are discussed in the PRIA. The agency seeks comment on the feasibility of the second alternative.
Because of the significant safety benefits that accrue by including Class 3–6 vehicles, and to allow time for the Class 3–6 vehicle manufactures to optimize implementations of both ESC and AEB into their vehicles, the agency decided not to select either alternative.
XII. Regulatory Notices and Analyses
Executive Orders 12866, 13563, and 14094 and DOT Regulatory Policies and Procedures
NHTSA and FMCSA have considered the impact of this rulemaking action under Executive Order 12866, as amended by Executive Order 14094, Executive Order 13563, and the Department of Transportation's regulatory procedures. This rulemaking is considered significant under section 3(f)(1) of Executive Order 12866, as amended, and was reviewed by the Office of Management and Budget under that Executive Order. NHTSA and FMCSA have prepared a preliminary regulatory impact analysis (PRIA) that assesses the cost and benefits of this proposed rule. The benefits, costs and other impacts of this NPRM are discussed in the prior section.
Regulatory Flexibility Act
Pursuant to the Regulatory Flexibility Act of 1980, Public Law 96–354, 94 Stat. 1164 (5 U.S.C. 601 et seq., as amended), whenever an agency is required to publish an NPRM or a final rule, it must prepare and make available for public comment a regulatory flexibility analysis that describes the effect of the rule on small entities ( i.e., small businesses, small not-for-profit organizations, and small governmental jurisdictions). I certify that this NPRM would not have a significant economic impact on a substantial number of small entities.
NHTSA's proposal would directly affect manufacturers of class 3- through 8 trucks, buses, and multipurpose passenger vehicles. Of the more than 20 companies who are sole manufacturers or first-stage manufacturers of class 3 through 8 vehicles in the United States, NHTSA found two companies (Proterra and Workhorse Group, Inc.) that qualify as a small entities. 198 Table 23. Below show the list of heavy duty truck manufacturers.
198 NHTSA researched MD and HD vehicle manufacturing companies and found their estimated number of employees and annual revenue (as of Dec 2022) from the following sources: zoominfo.com, macrotrends.net, zippia.com, statista.com , and linkedin.com .
| Type | Company | # Employees | Annual revenue (millions) | Notes |
|---|---|---|---|---|
| Trucks | Autocar company | 487 | $126 | Parent Company: GVW Group. |
| Brightdrop | 252 | 138 | Parent Company: GM. | |
| Ford | 186,000 | 158,060 | ||
| GM | 167,000 | 156,700 | ||
| International | 2,760 | 721 | Parent Company: Navistar. | |
| Freightliner | 15,000 | 450 | Parent Company: Daimler. | |
| Hendrickson International | 6,000 | 1,600 | ||
| Mack | 2,000 | 671 | Parent Company: Volvo. | |
| Navistar | 14,500 | 3,900 | ||
| Oshkosh Corp | 15,000 | 8,300 | ||
| PACCAR | 31,100 | 28,800 | Subsidiaries: Kenworth, Peterbilt. | |
| Ram | 200,000 | 180,000 | Parent Company: Stellantis. | |
| Shyft Group | 4,200 | 1,000 | ||
| Western Star | 3,221 | 680 | Parent Company: Daimler. | |
| Workhorse | 331 | 5 | Small Business. | |
| Buses | Bluebird | 1,702 | 726 | |
| Forest River | 11,000 | 3,300 | Parent Company: Berkshire Hathaway. | |
| Gillig | 900 | 267 | Parent Company: Henry Crown & Co. | |
| IC Bus | 219 | 44 | Parent Company: Navistar. | |
| Nikola | 1,500 | 51 | ||
| Proterra | 938 | 247 | Small Business. | |
| REV group | 6,800 | 2,300 | Subsidiary: El Dorado. | |
| Thomas Built Buses | 1,276 | 288 | Parent Company: Daimler. |
Workhorse Group, Inc. currently has about 330 employees. Its vehicles are already equipped with ESC and AEB and are unlikely to be affected by this proposal. Proterra is a manufacturer of large electric transit buses and falls into the small business threshold with about 9,400 employees. Although its vehicles are not currently equipped with AEB, its vehicles sell for approximately $750,000. With such a high sale price, NHTSA considers the effect of this rule on the price of the vehicle to be de minimis. Accordingly, NHTSA has concluded that this proposal would not have a significant economic impact upon these small entities. However, NHTSA seeks comment on this conclusion.
Final stage manufacturers are also affected by this proposal, and final stage manufacturers would be considered small entities. According to the U.S. Census, there are 570 small businesses in body manufacturing for light, medium, and heavy-duty classes. 199 This proposal likely would affect a substantial number of final stage manufacturers that are small businesses. It is NHTSA's understanding that these small entities rarely make modifications to a vehicle's braking system and instead rely upon the pass-through certification provided by the first-stage manufacturer, which is not typically a small business.. More information about multi-stage vehicle manufacturing can be found in section VI.E of this proposal. Additionally, this proposal would further accommodate final-stage manufacturers by providing them an additional year before compliance is required. Therefore, NHTSA does not believe at this time that the impacts of this proposal on small entities would be significant.
199 2020 SUSB Annual Data Tables by Establishment Industry, “U.S. and states, NAICS, detailed employment sizes.” https://www.census.gov/data/tables/2020/econ/susb/2020-susb-annual.html.
This rule may also affect purchasers of class 3 through 8 vehicles. It is assumed that the incremental costs of this proposal would be passed on to these purchasers. Class 7 through 8 vehicles are primarily purchased by motor carriers, an industry composed of approximately 757,652 interstate, intrastate, and hazardous materials motor carriers, in which over ninety percent of its companies (687,139) are considered small. 200 Class 3–6 vehicles consisting of work pickup trucks, small buses, and moving/cargo vans are purchased and utilized in industries where small businesses are not uncommon as well. It is not known precisely how frequently small businesses purchase new vehicles (instead of used vehicles) affected by the proposed rule, however, small entities usually have the option to finance or lease these vehicles to mitigate financial burden by spreading out cost over time. Table 24 below shows a list of industries, where small businesses may be affected by the proposed rule.
200 Assume a motor carrier of 10 or less power units is considered a small entity, which is very conservative given an SBA size standard of $30 million in annual revenue. 2022 Pocket Guide to Large Truck and Bus Statistics (December 2022), Federal Motor Carrier Safety Administration, p.13.
| NAICS Code | NAICS Industry description | Size standards in millions of dollars |
|---|---|---|
| 484110 | General Freight Trucking, Local | 30 |
| 484122 | General Freight Trucking, Long-Distance, Truckload | 30 |
| 484122 | General Freight Trucking, Long-Distance, Less Than Truckload | 38 |
| 484210 | Used Household and Office Goods Moving | 30 |
| 484220 | Specialized Freight (except Used Goods) Trucking, Local | 30 |
| 484230 | Specialized Freight (except Used Goods) Trucking, Long-Distance | 30 |
| 485113 | Bus and Other Motor Vehicle Transit Systems | 28.5 |
| 485210 | Interurban and Rural Bus Transportation | 28 |
| 485410 | School & Employee Bus Transportation | 26.5 |
| 485510 | Charter Bus Industry | 17 |
| 485991 | Special Needs Transportation | 16.5 |
| 488410 | Motor Vehicle Towing | 8 |
FMCSA's proposed requirement would ensure that the benefits resulting from CMVs equipped with AEBs are sustained through proper maintenance and operation. The cost of maintaining AEB systems is minimal and may be covered by regular annual maintenance. Therefore, FMCSA does not expect this requirement to have a significant economic impact on a substantial number of small entities.
Additional information concerning the potential impacts of this proposal on small businesses is presented in the PRIA accompanying this proposal. The agencies seek comment on the effects this NPRM would have on small businesses.
National Environmental Policy Act
The National Environmental Policy Act of 1969 (NEPA) 201 requires Federal agencies to analyze the environmental impacts of proposed major Federal actions significantly affecting the quality of the human environment, as well as the impacts of alternatives to the proposed action. 202 The Council on Environmental Quality (CEQ)'s NEPA implementing regulations direct federal agencies to determine the appropriate level of NEPA review for a proposed action; an agency can determine that a proposed action normally does not have significant effects and is categorically excluded, 203 or can prepare an environmental assessment for a proposed action “that is not likely to have significant effects or when the significance of the effects is unknown.” 204 When a Federal agency prepares an environmental assessment, CEQ's NEPA implementing regulations require it to (1) “[b]riefly provide sufficient evidence and analysis for determining whether to prepare an environmental impact statement or a finding of no significant impact;” and (2) “[b]riefly discuss the purpose and need for the proposed action, alternatives . . . , and the environmental impacts of the proposed action and alternatives, and include a listing of agencies and persons consulted.” 205
201 42 U.S.C. 4321–4347.
202 42 U.S.C. 4332(2)(C).
203 40 CFR 1501.4.
204 40 CFR 1501.5(a).
205 40 CFR 1501.5(c).
As discussed further below, FMCSA has determined that its proposed action is categorically excluded from further analysis and documentation in accordance with FMCSA Order 5610.1. 206 NHTSA determined that there is no similarly applicable categorical exclusion for its proposed action and has therefore determined that it is appropriate to prepare a Draft Environmental Assessment (EA). The preamble provides additional information about the distinction between NHTSA and FMCSA's proposed requirements based on each agency's statutory authority.
206 69 FR 9680 (Mar. 1, 2004).
This section serves as NHTSA's Draft EA. In this Draft EA, NHTSA outlines the purpose and need for the proposed rulemaking, a reasonable range of alternative actions the agency could adopt through rulemaking, and the projected environmental impacts of these alternatives.
Purpose and Need
This NPRM preamble and the accompanying PRIA set forth the purpose of and need for this action. The preamble and PRIA outline the safety need for this proposal, in particular to address safety problems associated with heavy vehicles, i.e., vehicles with a GVWR greater than 4,536 kilograms (10,000 pounds). These heavy vehicles, also referred to as Class 3–8 vehicles, 207 include single unit straight trucks, combination trucks, truck tractors, motorcoaches, transit buses, school buses, and certain pickup trucks. An annualized average of 2017 to 2019 data from NHTSA's FARS and CRSS shows heavy vehicles were involved in around 60,000 rear-end crashes in which the heavy vehicle was the striking vehicle annually, which represents 11 percent of all crashes involving heavy vehicles. 208 These rear-end crashes resulted in 388 fatalities annually, which comprises 7.4 percent of all fatalities in heavy vehicle crashes. These crashes resulted in approximately 30,000 injuries annually, or 14.4 percent of all injuries in heavy vehicle crashes, and 84,000 damaged vehicles with no injuries or fatalities. Considering vehicle size, approximately half of the rear-end crashes, injuries, and fatalities resulting from rear-end crashes where the heavy vehicle was the striking vehicle involved vehicles with a GVWR above 4,536 kilograms (10,000 pounds) up to 11,793 kilograms (26,000 pounds). Similarly, half of all rear-end crashes and the fatalities and injuries resulting from those crashes where the heavy vehicle was the striking vehicle involved vehicles with a GVWR of greater than 11.793 kilograms (26,000 pounds).
207 Class is a vehicle classification system used by the Federal Highway Administration of Department of Transportation to categorize vehicles into 8 Classes based on vehicle size, weight, and number of wheels. The following lists the GVWR for Class 3–8 heavy vehicles. A complete vehicle class categorization table is included in 49 CFR part 565.
Class GVWR
Class 3: 4,536–6,350 kg (10,001–14,000 pounds)
Class 4: 6,351–7,257 kg (14,001–16,000 pounds)
Class 5: 7,258–8,845 kg (16,001–19,500 pounds)
Class 6: 8,846–11,793 kg (19,501–26,000 pounds)
Class 7: 11,794–14,969 kg (26,001–33,000 pounds)
Class 8: 14,969 kg (33,001 pounds) and above
208 These rear-end crashes are cases where the heavy vehicle was the striking vehicle.
To address this safety need, NHTSA proposes to adopt a new FMVSS to require AEB systems on certain heavy vehicles. 209 Current AEB systems use radar and camera-based sensors or combinations thereof and build upon older FCW-only systems. An FCW-only system provides an alert to a driver of an impending rear-end collision with a lead vehicle to induce the driver to take action to avoid the crash but does not automatically apply the brakes. This proposal would require both FCW and AEB systems. For simplicity, when referring to AEB systems in general, this proposal is referring to both FCW and AEB unless the context suggests otherwise. NHTSA also proposes to amend FMVSS No. 136 to require nearly all heavy vehicles to have an ESC system that meets the equipment requirements, general system operational capability requirements, and malfunction detection requirements of FMVSS No. 136. In addition to requiring certain heavy vehicles be equipped with AEB/ESC, the proposed rule requires the heavy vehicles to be able to avoid a collision in various rear-end crash scenarios at different speeds.
209 Some heavy vehicles are excluded from the proposed rule. These include those vehicles that are excluded from FMVSS No. 121 and FMVSS No. 136.
As explained earlier in this preamble, the AEB system improves safety by using various sensor technologies and sub-systems that work together to detect when the vehicle is in a crash imminent situation, to automatically apply the vehicle brakes if the driver has not done so, or to apply more braking force to supplement the driver's braking, thereby detecting and reacting to an imminent crash. This proposed rule is anticipated to address the safety need by mitigating the amount of fatalities, non-fatal injuries, and property damage that would result from crashes that could potentially be prevented or mitigated because of AEB and ESC. This proposed rule is expected to substantially decrease risks associated with rear-end, rollover, and loss of control crashes.
This NPRM follows NHTSA's 2015 grant of a petition for rulemaking from the Truck Safety Coalition, the Center for Auto Safety, Advocates for Highway and Auto Safety and Road Safe America, requesting that NHTSA establish a safety standard to require AEB on certain heavy vehicles. This NPRM also responds to a mandate under the Bipartisan Infrastructure Law, enacted as the Infrastructure Investment and Jobs Act, directing the Department to prescribe an FMVSS that requires heavy commercial vehicles with FMVSS-required ESC systems to be equipped with an AEB system, and also promotes DOT's January 2022 National Roadway Safety Strategy to initiate a rulemaking to require AEB on heavy trucks. This NPRM also proposes Federal Motor Carrier Safety Regulations requiring the ESC and AEB systems to be on during vehicle operation.
Alternatives
NHTSA has considered three regulatory alternatives for the proposed action and a “no action alternative.” Under the no action alternative, NHTSA would not issue a final rule requiring that vehicles be equipped (installation standards) with systems that meet minimum specified performance standards, and manufacturers would continue to add these systems voluntarily. However, since the BIL directs NHTSA to promulgate a rule that would require heavy vehicles subject to FMVSS No. 136 to be equipped with an AEB system, the no action alternative is not a permissible option. The proposed standard (the preferred alternative) requires specific AEB/ESC installation and performance standards for certain Class 3–8 heavy vehicles with a two-tiered phase-in schedule based on whether the heavy vehicle is currently subject to FMVSS No. 136. Alternative 1, which is considered less stringent than the preferred alternative, would set AEB/ESC installation and performance standards only for vehicles currently subject to FMVSS No. 136. Alternative 2, which is considered more stringent than the preferred alternative, would require a more aggressive phase-in schedule for the AEB/ESC installation requirements for Class 3–6 heavy vehicles.
Although these regulatory alternatives differ in phase-in schedule and heavy vehicle Class applicability, the functional AEB/ESC installation and performance requirements would be the same. Please see the preamble and PRIA Chapter 11, Regulatory Alternatives, for more information about the preferred alternative and other regulatory alternatives, and the proposed standards' requirements.
Environmental Impacts of the Proposed Action and Alternatives
Based on the purpose and need for the proposed action and the regulatory alternatives described above, the primary environmental impacts that could potentially result from this rulemaking are associated with greenhouse gas (GHG) emissions and air quality, socioeconomics, public health and safety, solid waste/property damage/congestion, and hazardous materials. 210 Consistent with CEQ regulations and guidance, this EA discusses impacts in proportion to their potential significance. The effects of the proposed rulemaking that were analyzed further are summarized below.
210 NHTSA anticipates that the proposed action and alternatives would have negligible or no impact on the following resources and impact categories, and therefore has not analyzed them further: topography, geology, soils, water resources (including wetlands and floodplains), biological resources, resources protected under the Endangered Species Act, historical and archeological resources, farmland resources, environmental justice, and Section 4(f) properties.
Greenhouse Gas Emissions and Air Quality
NHTSA has previously recognized that additional weight required by FMVSS could potentially negatively impact the amount of fuel consumed by a vehicle, and accordingly result in GHG emissions or air quality impacts from criteria pollutant emissions. 211 Atmospheric GHGs affect Earth's surface temperature by absorbing solar radiation that would otherwise be reflected back into space. Carbon dioxide (CO 2 ) is the most significant GHG resulting from human activity. Motor vehicles emit CO 2 as well as other GHGs, including methane and nitrous oxides, in addition to criteria pollutant emissions that negatively affect public health and welfare.
211 Criteria pollutants is a term used to describe the six common air pollutants for which the Clean Air Act (CAA) requires the Environmental Protection Agency (EPA) to set National Ambient Air Quality Standards (NAAQS). EPA calls these pollutants criteria air pollutants because it regulates them by developing human health-based or environmentally based criteria ( i.e., science-based guidelines) for setting permissible levels.
Additional weight added to a vehicle, like added hardware from safety systems, can potentially cause an increase in vehicle fuel consumption and emissions. NHTSA analyzed in PRIA Chapter 9.1, Technology Unit Costs and Added Weights, the cost associated with meeting the performance requirements in the proposed rule, including the potential weight added to the vehicle. An AEB system for heavy vehicles requires the following hardware: sensors (radar mounted at front bumper and, in some cases, camera located at top, inside portion of windshield), control units (electronic control unit), display (in some cases integrated with existing dash cluster, in other cases, a separate display), associated wiring harnesses, mounting hardware specific to FCW/AEB system, and other materials and scrap (for electronic parts, this category includes labels, soldering materials, flux, and fasteners). 212 Although AEB and ESC have some shared system components, NHTSA also estimated that a limited amount of additional hardware would be required for ESC systems depending on the vehicle class, including accelerometers, yaw rate sensors, and steer angle sensors. 213 Based on a study conducted for NHTSA on the cost and weight of heavy vehicle FCW and AEB systems, 214 NHTSA concluded that the added weight for the installation of AEB is estimated to be up to 3.10 kg (~ 7 lbs) and AEB and ESC combined is up to 6.70 kg (~ 15 lbs). These weights are considered negligible compared to the 4,536 kg (10,000 lbs) or greater curb weight of Class 3–8 vehicles. NHTSA tentatively concluded in the PRIA that the proposed rule is not expected to impact the fuel consumption of Class 3–8 vehicles, and therefore none of the regulatory alternatives would be presumed to result in GHG or criteria pollutant impacts.
212 PRIA, at 141.
213 Final Regulatory Impact Analysis, FMVSS No. 136, Electronic Stability Control Systems on Heavy Vehicles; Docket No. NHTSA–2015–0056–0002, at VI–5.
214 Department of Transportation National Highway Traffic Safety Administration Office of Acquisition Management (NPO–320) West Building 51–117 1200 New Jersey Avenue SE Washington, DC 20590 Contract Number: DTNH2216D00037 Task Order: DTNH2217F00147 Cost and Weight Analysis of Heavy Vehicle Forward Collision Warning (FCW) and Automatic Emergency Braking (AEB) Systems for Heavy Trucks Ricardo Inc. Detroit Technical Center Van Buren Twp., MI 48111 USA September 27, 2018.
NHTSA also analyzed this action for purposes of the Clean Air Act (CAA)'s General Conformity Rule. 215 The General Conformity Rule does not require a conformity determination for Federal actions that are “rulemaking and policy development and issuance,” such as this action. 216 Therefore, NHTSA has determined it is not required to perform a conformity analysis for this action.
215 Section 176(c) of the CAA, codified at 42 U.S.C. 7506(c); To implement CAA Section 176(c), EPA issued the General Conformity Rule (40 CFR part 51, subpart W and part 93, subpart B). Pursuant to the CAA, the U.S. Environmental Protection Agency (EPA) has established a set of National Ambient Air Quality Standards (NAAQS) for the following criteria pollutants: carbon monoxide (CO), nitrogen dioxide (NO 2 ), ozone, particulate matter (PM) less than 10 micrometers in diameter (PM 10 ), PM less than 2.5 micrometers in diameter (PM 2.5 ), sulfur dioxide (SO 2 ), and lead (Pb). EPA requires a “conformity determination” when a Federal action would result in total direct and indirect emissions of a criteria pollutant or precursor originating in nonattainment or maintenance areas equaling or exceeding the emissions thresholds specified in 40 CFR 93.153(b)(1) and (2).
216 40 CFR 93.153(c)(2)(iii).
Socioeconomics
The socioeconomic impacts of the proposed rule would be primarily felt by heavy vehicle and equipment manufacturers, heavy vehicle drivers, and other road users that would otherwise be killed or injured as a result of heavy vehicle crashes. NHTSA conducted a detailed assessment of the economic costs and benefits of establishing the new rule in its PRIA. The main economic benefits come primarily from the reduction in fatalities and non-fatal injuries (safety benefits). Reductions in the severity of heavy vehicle crashes would be anticipated to have corresponding reductions in costs for medical care, emergency services, insurance administrative costs, workplace costs, and legal costs due to the fatalities and injuries avoided. Other socioeconomic factors discussed in the PRIA that would affect these parties include quantified property damage savings, and additional quantified and unquantified impacts like less disruptions to commodity flow and improved traffic conditions. Most of these socioeconomic benefits are related to public health and safety and are discussed in more detail below.
| Regulatory option | Relative to the proposed rule | Net cost per equivalent live saved | Net benefits | ||
| 3% | 7% | 3% | 7% | ||
| Proposed Rule | −$118,922 | $496,746 | $2,583,652,432 | $1,807,064,498 | |
| Alternative 1: AEB Requirements only for Class 7–8 | Less Stringent | −1,003,884 | −662,217 | 809,485,467 | 597,125,719 |
| Alternative 2: More Aggressive Phase in Schedule for Class 3–6 | More Stringent | −118,922 | 496,746 | 2,583,652,432 | 1,807,064,498 |
The total annual cost, considering the implementation of both AEB and ESC technologies proposed in this rule, is estimated to be $353 million. The proposed rule would generate a net benefit of $2.58 to $1.81 billion, annually under 3 and 7 percent discount rates. The proposed rule would be cost-effective given that the highest estimated net cost per fatal equivalent would be $0.50 million. Maintenance costs are considered de minimis and therefore not included in the cost estimate. Please see PRIA for additional information about the annual cost, monetized benefits, cost-effectiveness, and net benefits of this proposal.
Public Health and Safety
The affected environment for public health and safety includes roads, highways and other driving locations used by heavy vehicle drivers, drivers and passengers in light vehicles and other motor vehicles, and pedestrians or other individuals who could be injured or killed in crashes involving the vehicles regulated by the proposed action. In the PRIA, the agency determined the impacts on public health and safety by estimating the reduction in fatalities and injuries resulting from the decreased crash severity due to the use of AEB systems under the regulatory alternatives. Under the proposed standard (the preferred alternative), it is expected that the addition of a requirement for specific AEB/ESC installation and performance standards for certain Class 3–8 heavy vehicles with a two-tiered phase-in schedule, would result each year in 151 to 206 equivalent lives saved. Under Alternative 1, it is expected that the addition of a less stringent requirement that would set AEB/ESC installation and performance standards only for Class 7–8 heavy vehicles, with the same phase-in schedule as the preferred alternative, would result each year in 45 to 60 equivalent lives saved. Under Alternative 2, it is expected that the addition of a more stringent requirement that would require a more aggressive phase-in schedule for the AEB/ESC installation requirements for Class 3–6 heavy vehicles, would result in 94 to 128 equivalent lives saved in 2024 and 151 to 206 equivalent lives saved in 2025 onwards. The PRIA discusses this information in further detail.
Solid Waste/Property Damage/Congestion
Vehicle crashes can generate solid wastes and release hazardous materials into the environment. The chassis and engines, as well as associated fluids and components of automobiles and the contents of the vehicles, can all be deemed waste and/or hazardous materials. Solid waste can also include damage to the roadway infrastructure, including road surface, barriers, bridges, and signage. Hazardous materials are substances that may pose a threat to public safety or the environment because of their physical, chemical, or radioactive properties when they are released into the environment, in this case as a result of a crash. Vehicle crashes also generate socioeconomic and environmental effects from congestion as engines idle while drivers are caught in traffic jams and slowdowns, in particular from wasted fuel and the resulting increased greenhouse gas emissions. 217
217 Blincoe, L.J., Miller, T.R., Zaloshnja, E., & Lawrence, B.A. (2015, May). The economic and societal impact of motor vehicle crashes, 2010. (Revised) (Report No. DOT HS 812 013). Washington, DC: National Highway Traffic Safety Administration.
The proposal is projected to reduce the amount and severity of heavy vehicle crashes, and therefore is expected to reduce the quantity of solid waste, hazardous materials, and other property damage generated by vehicle crashes in the United States, in addition to reducing the traffic congestion that occurs as a consequence of a crash. Less solid waste translates into cost and environmental savings from reductions in the following areas: (1) transport of waste material, (2) energy required for recycling efforts, and (3) landfill or incinerator fees. Less waste will result in beneficial environmental effects through less GHG emissions used in the transport of it to a landfill, less energy used to recycle the waste, less emissions through the incineration of waste, and less point source pollution at the scene of the crash that would result in increased emissions levels or increased toxins leaking from the crashed vehicles into the surrounding environment. Similarly, as mentioned above, less congestion translates into economic and environmental benefits from fuel savings and reduced GHG emissions, in addition to benefits from the time that drivers are not caught in additional traffic congestion.
As discussed in the PRIA, NHTSA's monetized benefits are calculated by multiplying the number of non-fatal injuries and fatalities mitigated by their corresponding “comprehensive costs.” The comprehensive costs include economic costs that are external to the value of a statistical life (VSL) costs, such as emergency management services or legal costs, and congestion costs. NHTSA calculated the monetized benefits attributable to reduced traffic congestion and property damage in the PRIA accompanying this proposed rule for the proposed action and the regulatory alternatives. As shown in Table 26, the monetized benefits from reduced traffic congestion and property damage increase as the regulatory alternatives increase the heavy vehicle classes covered by the proposal and the proposal's phase-in year. Please see PRIA for additional information about the comprehensive cost values used in this proposal.
| Alternative 1 | Preferred alternative | Alternative 2 | |||
|---|---|---|---|---|---|
| 3% Discount | 7% Discount | 3% Discount | 7% Discount | 3% Discount | 7% Discount |
| $125,337,423 | $94,904,159 | $377,815,690 | $278,309,156 | 2024: $243,518,740 | 2024: $180,753,307. |
| 2025 Onwards: $377,815,690 | 2025 Onwards: $278,309,156. | ||||
While NHTSA did not quantify impacts aside from the monetized benefits from congestion and property damage savings, like the specific quantity of solid waste avoided from reduced crashes, NHTSA believes the benefits would increase relative to the crashes avoided and would be relative across the different alternatives. This is based in part on NHTSA and FMCSA's previously conducted Draft EA on heavy vehicle speed limiting devices. 218 While that Draft EA analyzed the effects of reduced crash severity, there would be similar, if not increasing benefits to avoided crashes as a result of the addition of AEB to heavy vehicles. 219 The PRIA discusses information related to quantified costs and benefits of crashes, and in particular property damage due to crashes, for each regulatory alternative in further detail.
218 Speed Limiting Devices Draft Environmental Assessment, DOT HS 812 324 (August 2016).
219 Id. at 33 (“Using this procedure, the results in this section are expected to be more conservative than if presented in terms of crash avoidance.”
Cumulative Impacts
In addition to direct and indirect effects, CEQ regulations require agencies to consider cumulative impacts of major Federal actions. CEQ regulations define cumulative impacts as the impact “on the environment that result from the incremental [impact] of the action when added to . . . other past, present, and reasonably foreseeable future actions regardless of what agency (Federal or non-Federal) or person undertakes such other actions.” 220 NHTSA notes that the public health and safety, solid waste/property damage/congestion, air quality and GHG emissions, socioeconomic, and hazardous material benefits identified in this EA were based on calculations described in the PRIA, in addition to other NHTSA actions and studies on motor vehicle safety. That methodology required the agency to adjust historical figures to reflect vehicle safety rulemakings that have recently become effective. As a result, many of the calculations in this EA already reflect the incremental impact of this action when added to other past actions.
220 40 CFR 1508.1(g)(3).
NHTSA's and other parties' past actions that improve the safety of heavy vehicles, as well as future actions taken by the agency or other parties that improve the safety of heavy vehicles, could further reduce the severity or number of crashes involving these vehicles. Any such cumulative improvement in the safety of heavy vehicles would have an additional effect in reducing injuries and fatalities and could reduce the quantity of solid and hazardous materials generated by crashes. Additional federal actions like NHTSA's fuel efficiency standards for heavy vehicles, and EPA's GHG and criteria pollutant emissions standards for heavy vehicles, could also result in additional decreased fuel use and emissions reductions in the future.
Agencies and Persons Consulted
This preamble describes the various materials, persons, and agencies consulted in the development of the proposal.
Finding of No Significant Impact
Although this rule is anticipated to result in increased FMVSS requirements for heavy vehicle manufacturers, NHTSA's analysis indicates that it would likely result in environmental and other socioeconomic benefits. The addition of regulatory requirements to standardize heavy vehicle AEB is anticipated to result in no additional fuel consumption (and accordingly, no additional GHG or criteria pollutant emissions impacts), increasing socioeconomic and public safety benefits depending on the regulatory alternative phase-in year and vehicle class applicability requirements from the no-action alternative, and an increase in benefits from the reduction in solid waste, property damage, and congestion (including associated traffic-level impacts like a reduction in energy consumption and tailpipe pollutant emissions from congestion) from fewer crashes.
Based on the information in this Draft EA and assuming no additional information or changed circumstances, NHTSA expects to issue a Finding of No Significant Impact (FONSI). 221 NHTSA has tentatively concluded that none of the impacts anticipated to result from the proposed action and alternatives under consideration will have a significant effect on the human environment. Such a finding will be made only after careful review of all public comments received. A Final EA and a FONSI, if appropriate, will be issued as part of the final rule.
221 40 CFR 1501.6(a).
FMCSA
FMCSA analyzed this rule pursuant to the National Environmental Policy Act and determined this action is categorically excluded from further analysis and documentation in an environmental assessment or environmental impact statement under FMCSA Order 5610.1 (69 FR 9680, Mar. 1, 2004), Appendix 2, paragraph 6(aa). The Categorical Exclusion in paragraph 6(aa) covers regulations requiring motor carriers, their officers, drivers, agents, representatives, and employees directly in control of CMVs to inspect, repair, and provide maintenance for every CMV used on a public road. In addition, this rule does not have any effect on the quality of environment.
Executive Order 13132 (Federalism)
NHTSA has examined this NPRM pursuant to Executive Order 13132 (64 FR 43255, August 10, 1999) and concludes that no additional consultation with States, local governments or their representatives is mandated beyond the rulemaking process. The agency has concluded that the rulemaking would not have sufficient federalism implications to warrant consultation with State and local officials or the preparation of a federalism summary impact statement. The NPRM would not have “substantial direct effects on the States, on the relationship between the national government and the States, or on the distribution of power and responsibilities among the various levels of government.”
NHTSA rules can preempt in two ways. First, the National Traffic and Motor Vehicle Safety Act contains an express preemption provision: When a motor vehicle safety standard is in effect under this chapter, a State or a political subdivision of a State may prescribe or continue in effect a standard applicable to the same aspect of performance of a motor vehicle or motor vehicle equipment only if the standard is identical to the standard prescribed under this chapter. 49 U.S.C. 30103(b)(1). It is this statutory command by Congress that preempts any non-identical State legislative and administrative law addressing the same aspect of performance.
The express preemption provision described above is subject to a savings clause under which “[c]ompliance with a motor vehicle safety standard prescribed under this chapter does not exempt a person from liability at common law.” 49 U.S.C. 30103(e). Pursuant to this provision, State common law tort causes of action against motor vehicle manufacturers that might otherwise be preempted by the express preemption provision are generally preserved.
However, the Supreme Court has recognized the possibility, in some instances, of implied preemption of such State common law tort causes of action by virtue of NHTSA's rules, even if not expressly preempted. This second way that NHTSA rules can preempt is dependent upon there being an actual conflict between an FMVSS and the higher standard that would effectively be imposed on motor vehicle manufacturers if someone obtained a State common law tort judgment against the manufacturer, notwithstanding the manufacturer's compliance with the NHTSA standard. Because most NHTSA standards established by an FMVSS are minimum standards, a State common law tort cause of action that seeks to impose a higher standard on motor vehicle manufacturers will generally not be preempted. However, if and when such a conflict does exist—for example, when the standard at issue is both a minimum and a maximum standard—the State common law tort cause of action is impliedly preempted. See Geier v. American Honda Motor Co., 529 U.S. 861 (2000).
Pursuant to Executive Order 13132 and 12988, NHTSA has considered whether this proposed rule could or should preempt State common law causes of action. The agency's ability to announce its conclusion regarding the preemptive effect of one of its rules reduces the likelihood that preemption will be an issue in any subsequent tort litigation. To this end, the agency has examined the nature ( e.g., the language and structure of the regulatory text) and objectives of this final rule and finds that this rule, like many NHTSA rules, would prescribe only a minimum safety standard. As such, NHTSA does not intend this NPRM to preempt State tort law that would effectively impose a higher standard on motor vehicle manufacturers than that established by a final rule. Establishment of a higher standard by means of State tort law will not conflict with the minimum standard adopted here. Without any conflict, there could not be any implied preemption of a State common law tort cause of action.
FMCSA has determined that this proposed rule would not have substantial direct costs on or for States concerning the adoption and enforcement of compatible motor carrier safety rules for intrastate motor carriers, nor would it limit the policymaking discretion of States. Nothing in this document would preempt any State motor carrier safety law or regulation. Therefore, this proposed rule would not have sufficient federalism implications to warrant the preparation of a Federalism Impact Statement related to the delivery of FMCSA's programs.
Civil Justice Reform
With respect to the review of the promulgation of a new regulation, section 3(b) of Executive Order 12988, “Civil Justice Reform” (61 FR 4729, February 7, 1996) requires that Executive agencies make every reasonable effort to ensure that the regulation: (1) Clearly specifies the preemptive effect; (2) clearly specifies the effect on existing Federal law or regulation; (3) provides a clear legal standard for affected conduct, while promoting simplification and burden reduction; (4) clearly specifies the retroactive effect, if any; (5) adequately defines key terms; and (6) addresses other important issues affecting clarity and general draftsmanship under any guidelines issued by the Attorney General. This document is consistent with that requirement.
Pursuant to this Order, NHTSA notes as follows. The preemptive effect of this rulemaking is discussed above. NHTSA notes further that there is no requirement that individuals submit a petition for reconsideration or pursue other administrative proceeding before they may file suit in court.
Paperwork Reduction Act (PRA)
Under the PRA of 1995, a person is not required to respond to a collection of information by a Federal agency unless the collection displays a valid OMB control number. There are no “collections of information” (as defined at 5 CFR 1320.3(c)) in this proposed rule.
National Technology Transfer and Advancement Act
Under the National Technology Transfer and Advancement Act of 1995 (NTTAA) (Public Law 104–113), all Federal agencies and departments shall use technical standards that are developed or adopted by voluntary consensus standards bodies, using such technical standards as a means to carry out policy objectives or activities determined by the agencies and departments. Voluntary consensus standards are technical standards ( e.g., materials specifications, test methods, sampling procedures, and business practices) that are developed or adopted by voluntary consensus standards bodies, such as the International Organization for Standardization (ISO) and SAE International. The NTTAA directs Federal agencies to provide Congress, through OMB, explanations when a Federal agency decides not to use available and applicable voluntary consensus standards.
NHTSA is proposing to incorporate by reference ISO and ASTM standards into this proposed rule. NHTSA considered several ISO standards and has proposed to use ISO 19206–3:2021 to specify the vehicle test device. NHTSA is incorporating by reference ASTM E1337–19, which is already incorporated by reference into many FMVSSs, to measure the peak braking coefficient of the testing surface.
NHTSA considered SAE J3029, Forward Collision Warning and Mitigation Vehicle Test Procedure—Truck and Bus, which defines the conditions for testing AEB and FCW systems. This document outlines a basic test procedure to be performed under specified operating and environmental conditions. It does not define tests for all possible operating and environmental conditions. The procedures in this SAE recommended practice are substantially similar to this proposal. Minimum performance requirements are not addressed in SAE J3029.
In Appendix B of this preamble, NHTSA describes several international test procedures and regulations the agency considered for use in this NPRM. This proposed rule also has substantial technical overlap with the UNECE No. 131 described in the appendix. First, this proposed rule and UNECE No. 131 specify a warning and automatic emergency braking in lead vehicle crash situations. Several lead vehicle scenarios are nearly identical, including the stopped lead vehicle and lead vehicle moving scenarios. Finally, NHTSA has based its test target for the lead vehicle test device on the “soft target option” condition contained in UNECE No. 152. As discussed in the appendix, this proposed rule differs from the UNECE standards in the areas of maximum test speed and the basic performance criteria. This proposed rule uses higher test speeds to better match the safety problem in the United States. This proposed rule includes a requirement that the test vehicle avoid contact. This approach would increase the repeatability of the test and maximize the realized safety benefits of the rule.
Incorporation by Reference
Under regulations issued by the Office of the Federal Register (1 CFR 51.5(a)), an agency, as part of a proposed rule that includes material incorporated by reference, must summarize material that is proposed to be incorporated by reference and discuss the ways the material is reasonably available to interested parties or how the agency worked to make materials available to interested parties.
In this NPRM, NHTSA proposes to incorporate by reference three documents into the Code of Federal Regulations, one of which is already incorporated by reference. The document already incorporated by reference into 49 CFR part 571 is ASTM E1337, “Standard Test Method for Determining Longitudinal Peak Braking Coefficient (PBC) of Paved Surfaces Using Standard Reference Test Tire.” ASTM E1337 is a standard test method for evaluating peak braking coefficient of a test surface using a standard reference test tire using a trailer towed by a vehicle. NHTSA uses this method in all of its braking and electronic stability control standards to evaluate the test surfaces for conducting compliance test procedures.
NHTSA is also proposing to incorporate by reference into part 571 SAE J2400, “Human Factors in Forward Collision Warning System: Operating Characteristics and User Interface Requirements.” SAE J2400 is an information report that is intended as a starting point of reference for designers of forward collision warning systems. NHTSA would incorporate this document by reference solely to specify the location specification and symbol for a visual forward collision warning.
NHTSA is proposing to incorporate by reference ISO 19206–3:2021(E), “Test devices for target vehicles, vulnerable road users and other objects, for assessment of active safety functions —Part 3: Requirements for passenger vehicle 3D targets.” This document provides specification of three-dimensional test devices that resemble real vehicles. It is designed to ensure the safety of the test operators and to prevent damage to subject vehicles in the event of a collision during testing. NHTSA is referencing many, but not all, of the specifications of ISO 19206–3:2021(E), as discussed in section VIII.B of this NPRM.
All standards proposed to be incorporated by reference in this NPRM are available for review at NHTSA's headquarters in Washington, DC, and for purchase from the organizations promulgating the standards. The ASTM standard presently incorporated by reference into other NHTSA regulations is also available for review at ASTM's online reading room. 222
222 https://www.astm/org/READINGLIBRARY/.
Unfunded Mandates Reform Act
The Unfunded Mandates Reform Act of 1995 (Pub. L. 104–4) requires agencies to prepare a written assessment of the costs, benefits, and other effects of proposed or final rules that include a Federal mandate likely to result in the expenditures by States, local or tribal governments, in the aggregate, or by the private sector, $100 million or more (adjusted annually for inflation with base year of 1995) in any one year. Adjusting this amount by the Consumer Price Index for All-Urban Consumers (CPI–U) for the year 2021 and 1995 results in an estimated current value of $178 million (= 2021 index value of 270.970/1995 index value of 152.400). This proposed rule is not likely to result in expenditures by State, local, or tribal governments of more than $178 million in any one year. However, it is estimated to result in the expenditures by motor vehicle manufacturers of more than $178 million. The prior section of this NPRM contains a summary of the costs and benefits of this proposed rule, and the PRIA discusses the costs and benefits of this proposed rule in detail.
Executive Order 13609 (Promoting International Regulatory Cooperation)
The policy statement in section 1 of E.O. 13609 states, in part, that the regulatory approaches taken by foreign governments may differ from those taken by U.S. regulatory agencies to address similar issues and that, in some cases, the differences between the regulatory approaches of U.S. agencies and those of their foreign counterparts might not be necessary and might impair the ability of American businesses to export and compete internationally. The E.O. states that, in meeting shared challenges involving health, safety, labor, security, environmental, and other issues, international regulatory cooperation can identify approaches that are at least as protective as those that are or would be adopted in the absence of such cooperation and that international regulatory cooperation can also reduce, eliminate, or prevent unnecessary differences in regulatory requirements. NHTSA requests public comment on the “regulatory approaches taken by foreign governments” concerning the subject matter of this rulemaking.
Regulation Identifier Number
The Department of Transportation assigns a regulation identifier number (RIN) to each regulatory action listed in the Unified Agenda of Federal Regulations. The Regulatory Information Service Center publishes the Unified Agenda in April and October of each year. You may use the RINs contained in the heading at the beginning of this document to find this action in the Unified Agenda.
Plain Language
Executive Order 12866 requires each agency to write all rules in plain language. Application of the principles of plain language includes consideration of the following questions:
• Have we organized the material to suit the public's needs?
• Are the requirements in the rule clearly stated?
• Does the rule contain technical language or jargon that isn't clear?
• Would a different format (grouping and order of sections, use of headings, paragraphing) make the rule easier to understand?
• Would more (but shorter) sections be better?
• Could we improve clarity by adding tables, lists, or diagrams?
• What else could we do to make the rule easier to understand?
If you have any responses to these questions, please write to us with your views.
XV. Public Participation
How long do I have to submit comments?
Please see the DATES section at the beginning of this document.
How do I prepare and submit comments?
• Your comments must be written in English.
• To ensure that your comments are correctly filed in the Docket, please include the Docket Number shown at the beginning of this document in your comments.
• Your comments must not be more than 15 pages long. (49 CFR 553.21). NHTSA established this limit to encourage you to write your primary comments in a concise fashion. However, you may attach necessary additional documents to your comments. There is no limit on the length of the attachments. FMCSA does not impose a page limit on docket comments, but like NHTSA, it appreciates a concise statement of the issues addressed by commenters.
• If you are submitting comments electronically as a PDF (Adobe) File, NHTSA asks that the documents be submitted using the Optical Character Recognition (OCR) process, thus allowing NHTSA to search and copy certain portions of your submissions. Comments may be submitted to the docket electronically by logging onto the Docket Management System website at https://www.regulations.gov. Follow the online instructions for submitting comments.
• You may also submit two copies of your comments, including the attachments, to Docket Management at the address given above under ADDRESSES .
Please note that pursuant to the Data Quality Act, in order for substantive data to be relied upon and used by the agency, it must meet the information quality standards set forth in the OMB and DOT Data Quality Act guidelines. Accordingly, we encourage you to consult the guidelines in preparing your comments. OMB's guidelines may be accessed at https://www.whitehouse.gov/omb/fedreg/reproducible.html. DOT's guidelines may be accessed at https://www.bts.gov/programs/statistical_policy_and_research/data_quality_guidelines.
How can I be sure that my comments were received?
If you wish Docket Management to notify you upon its receipt of your comments, enclose a self-addressed, stamped postcard in the envelope containing your comments. Upon receiving your comments, Docket Management will return the postcard by mail.
How do I submit confidential business information?
NHTSA
If you wish to submit any information under a claim of confidentiality, you should submit three copies of your complete submission, including the information you claim to be confidential business information (CBI), to the Chief Counsel, NHTSA, at the address given above under FOR FURTHER INFORMATION CONTACT . In addition, you should submit two copies, from which you have deleted the claimed confidential business information, to Docket Management at the address given above under ADDRESSES . When you send a comment containing information claimed to be confidential business information, you should include a cover letter setting forth the information specified in our confidential business information regulation. (49 CFR part 512). To facilitate social distancing during COVID–19, NHTSA is temporarily accepting confidential business information electronically. Please see https://www.nhtsa.gov/coronavirus/submission-confidential-business-information for details.
FMCSA
CBI is commercial or financial information that is both customarily and actually treated as private by its owner. Under the Freedom of Information Act (5 U.S.C. 552), CBI is exempt from public disclosure. If your comments responsive to the NPRM contain commercial or financial information that is customarily treated as private, that you actually treat as private, and that is relevant or responsive to the NPRM, it is important that you clearly designate the submitted comments as CBI. Please mark each page of your submission that constitutes CBI as “PROPIN” to indicate it contains proprietary information. FMCSA will treat such marked submissions as confidential under the Freedom of Information Act, and they will not be placed in the public docket of the NPRM. Submissions containing CBI should be sent to Mr. Brian Dahlin, Chief, Regulatory Evaluation Division, Office of Policy, FMCSA, 1200 New Jersey Avenue SE, Washington, DC 20590–0001. Any comments FMCSA receives not specifically designated as CBI will be placed in the public docket for this rulemaking.
Will the agency consider late comments?
NHTSA will consider all comments that Docket Management receives before the close of business on the comment closing date indicated above under DATES . To the extent possible, we will also consider comments that Docket Management receives after that date. If Docket Management receives a comment too late for us to consider in developing the final rule, we will consider that comment as an informal suggestion for future rulemaking action. FMCSA will consider all comments and material received during the comment period and through the closing date up to 11:59:59 p.m. ET.
How can I read the comments submitted by other people?
You may read the comments received by Docket Management at the address given above under ADDRESSES . The hours of the Docket are indicated above in the same location. You may also see the comments on the internet. To read the comments on the internet, go to https://www.regulations.gov. Follow the online instructions for accessing the dockets.
Please note that, even after the comment closing date, we will continue to file relevant information in the Docket as it becomes available. Further, some people may submit late comments. Accordingly, we recommend that you periodically check the Docket for new material.
XIV. Appendices to the Preamble
Appendix A: Description of Technologies
For the convenience of readers, this section describes various technologies of an AEB system. An AEB system employs multiple sensor technologies and sub-systems that work together to sense a crash imminent scenario and, where applicable, automatically apply the vehicle brakes to avoid or mitigate a crash. Current systems utilize radar- and camera-based sensors. AEB has been implemented in vehicles having electronic stability control technology, which itself leverages antilock braking system technologies. It also builds upon older forward collision warning-only systems.
Radar-Based Sensors
At its simplest form, radar is a time-of-flight sensor that measures the time between when a radio wave is transmitted and its reflection is recorded. This time-of-flight is then used to calculate the distance to the object that caused the reflection. More information about the reflecting object, such as speed, can be determined by comparing the output signal to the input signal. Typical automotive applications use a type of radar called Frequency Modulated Continuous Wave radar. This radar system sends out a radio pulse where the pulse frequency rises through the duration of the pulse. This pulse is reflected off the object and the radar sensor compares the reflected signal to the original pulse to determine the range and relative speed.
Radar sensors are widely used in AEB application, for many reasons. These sensors can have a wide range of applicability, with automotive grade radars sensing ranges on the order of 1 meter (3 ft) up to over 200 meters (656 ft). Radar sensors are also relatively unaffected by time of day, precipitation, fog, and many other adverse weather conditions. Automotive radar systems typically operate on millimeter wave lengths, easily reflecting off even the smallest metallic surfaces found on vehicles. Radio waves tend to penetrate soft materials, such as rubber and plastic, allowing these sensors to be mounted in the front ends of vehicles behind protective, and visually appealing, grilles and bumper fascia.
Radar-based sensors have limitations that impact their effectiveness. Radar is a line-of-sight sensor, in that they only operate in the direction the receiving antenna is pointed and therefore have a limited angular view. Also, while radar is excellent at identifying radar-reflective objects, the nature of the radar reflection makes classification of that object difficult. In addition, objects that do not reflect radio waves easily, such as rubber, plastic, humans, and other soft objects, are difficult for radar-based sensors to detect. Lastly, because forward facing radar sensors are usually mounted inside the front end of equipped vehicles, damage caused from front-end collisions can lead to alignment issues and reduced effectiveness.
Camera Sensors
Cameras are passive sensors in which optical data are recorded by digital imaging chips, which are then processed to allow for object detection and classification. They are an important part of most automotive AEB systems and one or more cameras are typically mounted behind the front windshield, often high up near the rearview mirror. This provides a good view of the road, plus the windshield wipers provide protection from debris and grease, dirt and the like that can cover the sensor.
Camera-based imaging systems are one of the few sensor types that can determine both color and contrast information. This makes them able to recognize and classify objects such as road signs, other vehicles, and pedestrians, much in the same way the human eye does. In addition, systems that utilize two or more cameras can see stereoscopically, allowing the processing system to determine range information along with detection and classification.
Like all sensor systems, camera-based sensors have their benefits and limitations. Monocular camera systems lack depth perception and are poor at determining range, and even stereoscopic camera systems are not ideal for determining speed. Because cameras rely on the visible spectrum of light, conditions that make it difficult to see such as rain, snow, sleet, fog, and even dark unlit areas, decrease the effectiveness of perception checks of these systems. It is also possible for the imaging sensor to saturate when exposed to excessive light, such as driving towards the sun. For these reasons, camera sensors are often used in conjunction with other sensors like radar.
Electronically Modulated Braking Systems
Automatic actuation of the vehicle brakes requires more than just systems to sense when a collision is imminent. Regardless of how good a sensing system is, hardware is needed to physically apply the brakes without relying on the driver to modulate the brake pedal. The automatic braking system leverages two foundational braking technologies, antilock braking systems and electronic safety control.
Antilock brakes are a foundational technology that automatically controls the degree of wheel slip during braking to prevent wheel lock and minimize skidding, by sensing the rate of angular rotation of the wheels and modulating the braking force at the wheels to keep the wheels from slipping. Modern ABS systems have wheel speed sensors and independent brake modulation at each wheel and can increase and decrease braking pressures as needed.
ESC builds upon the antilock brakes and increases their capability with the addition of at least two sensors, a steering wheel angle sensor and an inertial measurement unit. These sensors allow the ESC controller to determine intended steering direction (from the steering wheel angle sensor), compare it to the actual vehicle direction, and then apply appropriate braking forces at each wheel to induce a counter yaw when the vehicle starts to lose lateral stability. AEB uses the hardware needed for ESC and automatically applies the brakes to avoid certain scenarios where a crash with a vehicle is imminent.
Forward Collision Warning
Using the sensors described above, coupled with an alert mechanism and perception calculations, a FCW system is able to monitor a vehicle's speed, the speed of the vehicle in front of it, and the distance between the two vehicles. If the FCW system determines that the distance from the driver's vehicle to the vehicle in front of it is too short, and the closing velocity between the two vehicles is too high, the system warns the driver of an impending rear-end collision.
Typically, FCW systems are comprised of two components: a sensing system, which can detect a vehicle in front of the driver's vehicle, and a warning system, which alerts the driver to a potential crash threat. The sensing portion of the system may consist of forward-looking radar, camera systems, lidar or a combination of these. Warning systems in use today provide drivers with a visual display, such as an illuminated telltale on the instrument panel, an auditory signal ( e.g., beeping tone or chime), and/or a haptic signal that provides tactile feedback to the driver ( e.g., rapid vibrations of the seat pan or steering wheel or a momentary brake pulse) to alert the driver of an impending crash so that they may manually intervene ( e.g., apply the vehicle's brakes or make an evasive steering maneuver) to avoid or mitigate the crash.
FCW systems alone are designed to warn the driver, but do not provide automatic braking of the vehicle (some FCW systems use haptic brake pulses to alert the driver of a crash-imminent driving situation, but they are not intended to effectively slow the vehicle). Since the first introduction of FCW systems, the technology has advanced such that it is now possible to couple those sensors, software, and alerts with the vehicles service brake system to provide additional functionality covering a broader portion of the safety problem.
From a functional perspective, research suggests that active braking systems, such as AEB, provide greater safety benefits than warning systems, such as FCW systems. However, NHTSA has found that current AEB systems often integrate the functionalities of FCW and AEB into one frontal crash prevention system to deliver improved real-world safety performance and high consumer acceptance. FCW can now be considered a component of AEB. As such, this NPRM integrates FCW directly into the performance requirements for AEB. This integration would also enable the agency to assess vehicles' compliance with the proposed FCW and AEB requirements at the same time in a single test.
Automatic Emergency Braking
Unlike systems that only alert, AEB systems (systems that automatically apply the brakes), are designed to actively help drivers avoid or mitigate the severity of rear-end crashes. AEB has been previously broken into two primary functions, crash imminent braking and dynamic brake support. CIB systems provide automatic braking when forward-looking sensors indicate that a crash is imminent and the driver has not applied the brakes, whereas DBS systems use the same forward-looking sensors, but provides supplemental braking after the driver applies the brakes when sensors determine that driver-applied braking is insufficient to avoid an imminent rear-end crash. This NPRM does not split the terminology of these functionalities and instead discusses them together as “AEB.” In some crash situations, AEB functions independently of the driver's use of the brake pedal (CIB), while in other situations, the vehicle uses the driver's pedal input to better evaluate the situation and avoid the crash (in the light vehicle context, this is called DBS). This proposal considers each function necessary to address the safety need and presents a performance-based regulatory approach that can permit the detailed application of each function to be based on the specific vehicle application and the manufacturer's approach to meeting the standard.
In response to an FCW alert or a driver noticing an imminent crash scenario, a driver may initiate braking to avoid a rear-end crash. In situations where the driver's braking is insufficient to prevent a collision, the AEB system can automatically supplement the driver's braking action to prevent or mitigate the crash. Similar to FCW systems, AEB systems employ forward-looking sensors such as radar and vision-based sensors to detect vehicles in the path directly ahead and monitor a vehicle's operating conditions such as speed or brake application. However, AEB systems can also actively supplement braking to assist the driver whereas FCW systems serve only to warn the driver of a potential crash threat.
If a driver does not take any action to brake when a rear-end crash is imminent, AEB systems utilize the same types of forward-looking sensors to apply the vehicle's brakes automatically to slow or stop the vehicle. The amount of braking applied varies by manufacturer, and several systems are designed to achieve maximum vehicle deceleration just prior to impact. This NPRM would not directly require a particular deceleration capability but specifies situations in which crash avoidance must be achieved. Avoidance may be produced by a combination of warnings, vehicle deceleration, and AEB application timing.
Appendix B: International Regulatory Requirements and Other Standards
European Union (EU)
UNECE 131: Uniform provisions concerning the approval of motor vehicles regarding the Advanced Emergency Braking Systems (AEBS).
Europe mandated AEBS for nearly all heavy vehicles starting in November 2013. The mandate requires warning and automatic braking on Lead Vehicle Moving (LVM) and Stopped lead vehicle (LVS), but it does not require Dynamic Braking Support (DBS). It also requires Forward Collision Warning (FCW) in 2 of 3 modes (audio, visual, haptic). This mandate was implemented into two phases. Phase 1, which is for new types ( i.e., an all-new vehicle configuration) was mandated in November 2013, and new vehicles in November 2015. Phase 2 which covers more stringent implementations, was put in place for the new types in November 2016 and all new heavy vehicles in November 2018. The requirements apply to buses and trucks over 3,500 kg (7,716 lbs.). EU regulations include an electronic stability control (ESC) requirement for all heavy-duty vehicle segments.
The United Nations Economic Commission for Europe (UNECE) is the main entity that regulates vehicle safety in the European Union. UNECE has developed regulations for the implementation of AEBS (using a type approval process) in motor vehicles, as described below (UNECE Regulation 131). Regarding AEBS test procedures, the lead-vehicle-moving scenario in UNECE regulations has a subject vehicle speed of 80 km/h (50 mph). For the lead-vehicle-stopped scenario, the subject vehicle speed is also 80 km/h (50 mph).
In addition, it also has false positive test requirements for vehicle speeds of 50 km/h (31 mph). However, these false positive test requirements are different from the ones in NHTSA's proposal, because NHTSA uses a steel trench plate and pass-through vehicles, as opposed to UNECE, which only uses pass-through vehicles.
There are similarities between the performance requirements of the UNECE regulation and proposed FMVSS No. 128 as the speeds of the subject vehicle in the scenarios of stopped lead vehicle as well as slow moving lead vehicle are the same. However, the UNECE regulation does not have performance requirements for decelerating lead vehicle scenarios, which NHTSA does have. Because NHTSA has tentatively determined it is important to have a decelerating lead vehicle test scenario, NHTSA decided not to completely base its requirements on the UNECE regulation parameters.
We note that UNECE 131 is considering the implementation of Automatic Emergency Braking-Pedestrian (PAEB) into its existing regulation. NHTSA is not proposing PAEB for heavy vehicles in this NPRM. NHTSA believes there are unknowns at this time about the performance of PAEB on heavy vehicles in the U.S., as well as cost and other technical and practicability considerations to support a proposed implementation of PAEB for heavy vehicles. Rather than delay this NPRM to obtain this information, we have decided to proceed with the rulemaking as set forth in this NPRM.
Japan
In January 2017, the Japanese government, under the Ministry of Land, Infrastructure, Transport and Tourism (MLIT) presented a proposal for UN Regulation on AEBS for M1/N1 vehicles. 223 As part of the harmonization efforts under consideration by the UNECE working group (WP.29), MLIT proposed a new United Nations regulation on AEBS in September 2008, initially including M2, N2, M3 and N3 vehicles, and having as a future target M1 and N1 vehicles. NHTSA's consideration of UNECE Regulation 131 is discussed above.
223 https://unece.org/DAM/trans/doc/2017/wp29grrf/GRRF-83-17e.pdf.
South Korea
The Republic of Korea (ROK), under the Ministry of Land, Infrastructure and Transport (MOLIT), in January 2019 required all passenger vehicles to have AEBS and lane departure warning systems. Those requirements were applied to trucks and other vehicles in July 2021. Article 90–3 (Advanced Emergency Braking System (AEBS)) from the Korean standard applies to buses and trucks/special purpose vehicle with a gross vehicle weight more than 3.5 tons (over 3,500 kg) (7,716 lbs.). 224 The majority of the performance requirements from the Korean standard is derived from UNECE Regulation 131. NHTSA's consideration of ECE Regulation 131 is discussed above.
224 Regulations for Performance sand Safety Standards of Motor Vehicle and Vehicle Parts: Article 90–3 and Table 7–8.
SAE International (SAE)
SAE J3029: Forward Collision Warning and Mitigation Vehicle Test Procedure—Truck and Bus.
This SAE Recommended Practice (RP) establishes uniform powered vehicle level test procedures for Forward Collision Avoidance and Mitigation (FCAM) systems (also identified as AEB systems) used in highway commercial vehicles and coaches greater than 4,535 kg (10,000 lbs.) GVWR. This document outlines a basic test procedure to be performed under specified operating and environmental conditions. It does not define tests for all possible operating and environmental conditions. Minimum performance requirements are not addressed in this document.
When comparing the SAE test procedure with proposed FMVSS No. 128, the SAE procedure specifies lower test conditions than NHTSA's proposal. The SAE subject vehicle speed for the stopped lead vehicle scenario is 40.2 km/h (25 mph), compared to 80 km/h (50 mph) in this NPRM. For the case of false activation test parameters, SAE uses 50.7 km/h (32 mph), compared to 80 km/h (50 mph) used in the NHTSA proposed performance requirements. NHTSA is not proposing to use the performance requirements from the SAE tests because the agency believes they are not stringent enough to provide the level of safety benefit the agency seeks for this NPRM.
International Organization for Standardization (ISO)
ISO 19377: Heavy commercial vehicles and buses—Emergency braking on a defined path—Test method for trajectory measurement.
This standard describes test methods for determining the deviation of the path travelled by a vehicle during a braking maneuver induced by an emergency braking system from a pre-defined desired path. The standard evaluates the vehicle path during and following the system intervention. The corrective steering actions for keeping the vehicle on the desired path can be applied either by the driver or by a steering machine or by a driver assistance system.
This document applies to heavy vehicles equipped with an advanced emergency braking system, including commercial vehicles, commercial vehicle combinations, buses and articulated buses as defined in ISO 3833 225 (trucks and trailers with maximum weight above 3,5 tonnes (3,500 kg or 7,716 lbs.) and buses and articulated buses with maximum weight above 5 tonnes (5,000 kg or 11,023 lbs.), according to ECE and European Commission on vehicle classification, categories M3, N2, N3, O3 and O4).
225 ISO 3833, “Road vehicles—Types—Terms and Definitions,” ISO 3833 defines terms relating to some types of road vehicles designated according to certain design and technical characteristics. ISO 3833—European Standards (en-standard.eu).
NHTSA considered the ISO test procedure but decided it is limited because the ISO standard tests braking on a defined path on a straight line as well as braking in a constant radius curve, which NHTSA does not. Therefore, NHTSA is not proposing performance requirements based on the ISO standard.
Proposed Regulatory Text
List of Subjects
49 CFR Part 393
Highways and roads, Motor carriers, Motor vehicle equipment, Motor vehicle safety.
49 CFR Part 396
Highway safety, Motor carriers, Motor vehicle safety, Reporting and recordkeeping requirements.
49 CFR Part 571
Imports, Incorporation by reference, Motor vehicle safety, Reporting and recordkeeping requirements, Tires.
49 CFR Part 596
Motor vehicle safety, Automatic emergency braking, Incorporation by reference, Motor vehicle safety, Test devices.
In consideration of the foregoing, FMCSA proposes to amend 49 CFR parts 393 and 396, and NHTSA proposes to amend part 571 and add part 596 as follows:
PART 393—PARTS AND ACCESSORIES NECESSARY FOR SAFE OPERATION
1. The authority citation for 49 CFR part 393 is amended to read as follows:
Authority:
49 U.S.C. 31136, 31151, and 31502; sec. 1041(b) of Pub. L. 102–240, 105 Stat. 1914, 1993 (1991); sec. 5301 and 5524 of Pub. L. 114–94, 129 Stat. 1312, 1543, 1560; sec. 23010, Pub. L. 117–58, 135 Stat. 429, 766–767, and 49 CFR 1.87.
2. Amend §393.5 by adding, in alphabetical order, the definition for “Automatic emergency braking (AEB) system” and “Electronic stability control system or ESC system” to read as follows:
§393.5 Definitions.
* * * * *
Automatic emergency braking (AEB) system is a system that detects an imminent collision with vehicles, objects, and road users in or near the path of a vehicle and automatically controls the vehicle's service brakes to avoid or mitigate the collision.
Electronic stability control system or ESC system means a system that has all of the following attributes:
(1) It augments vehicle directional stability by having the means to apply and adjust the vehicle brake torques individually at each wheel position on at least one front and at least one rear axle of the vehicle to induce correcting yaw moment to limit vehicle oversteer and to limit vehicle understeer;
(2) It enhances rollover stability by having the means to apply and adjust the vehicle brake torques individually at each wheel position on at least one front and at least one rear axle of the vehicle to reduce lateral acceleration of a vehicle;
(3) It is computer-controlled with the computer using a closed-loop algorithm to induce correcting yaw moment and enhance rollover stability;
(4) It has a means to determine the vehicle's lateral acceleration;
(5) It has a means to determine the vehicle's yaw rate and to estimate its side slip or side slip derivative with respect to time;
(6) It has a means to estimate vehicle mass or, if applicable, combination vehicle mass;
(7) It has a means to monitor driver steering inputs;
(8) It has a means to modify engine torque, as necessary, to assist the driver in maintaining control of the vehicle and/or combination vehicle; and
(9) When installed on a truck tractor, it has the means to provide brake pressure to automatically apply and modulate the brake torques of a towed trailer.
* * * * *
3. Add §393.56 to read as follows:
§393.56 Electronic Stability Control Systems.
(a) Truck tractors manufactured between August 1, 2019 and [the first September 1 that is 5 years after the date of publication of a final rule]. Each truck tractor (except as provided by 49 CFR 571.136, paragraph S3.1 or truck tractors engaged in driveaway-towaway operations) with a gross vehicle weight rating of greater than 11,793 kilograms (26,000 pounds) manufactured on or after August 1, 2019, but before [ the first September 1 that is 5 years after the date of publication of a final rule ], must be equipped with an electronic stability control (ESC) system that meets the requirements of Federal Motor Vehicle Safety Standard No. 136 (49 CFR 571.136).
(b) Buses manufactured between August 1, 2019 and [the first September 1 that is 5 years after the date of publication of a final rule]. Each bus (except as provided by 49 CFR 571.136, paragraph S3.1 or buses engaged in driveaway-towaway operations) with a gross vehicle weight rating of greater than 11,793 kilograms (26,000 pounds) manufactured on or after August 1, 2019, but before [ the first September 1 that is 5 years after the date of publication of a final rule ], must be equipped with an ESC system that meets the requirements of FMVSS No. 136.
(c) Commercial motor vehicles manufactured on and after [the first September 1 that is 5 years after the date of publication of a final rule]. Trucks and buses, with a GVWR greater than 4,536 kilograms (10,000 pounds) and truck tractors manufactured on or after [ the first September 1 that is 5 years after the date of publication of a final rule ] (except trucks, buses, and truck tractors engaged in driveaway-towaway operations), must be equipped with an electronic stability control (ESC) system that meets the requirements of Federal Motor Vehicle Safety Standard No. 136 (49 CFR 571.136).
(d) ESC Malfunction Detection. Each truck, truck tractor and bus must be equipped with an indicator lamp, mounted in front of and in clear view of the driver, which is activated whenever there is a malfunction that affects the generation or transmission of control or response signals in the vehicle's electronic stability control system.
4. Add §393.57 to read as follows:
§393.57 Automatic Emergency Braking Systems.
(a) Truck tractors manufactured on or after [the first September 1 that is 3 years after the date of publication of a final rule]. Each truck tractor (except as provided by 49 CFR 571.136, paragraph S3.1 or truck tractors engaged in driveaway-towaway operations) with a gross vehicle weight rating of greater than 11,793 kilograms (26,000 pounds) manufactured on or after the first September 1 that is 3 years after the date of publication of a final rule ], must be equipped with an automatic emergency brake (AEB) system that meets the requirements of Federal Motor Vehicle Safety Standard No. 128 (49 CFR 571.128).
(b) Buses manufactured on or after [the first September 1 that is 3 years after the date of publication of a final rule]. Each bus (except as provided by 49 CFR 571.136, paragraph S3.1 or buses engaged in driveaway-towaway operations) with a gross vehicle weight rating of greater than 11,793 kilograms (26,000 pounds) manufactured on or after the first September 1 that is 3 years after the date of publication of a final rule ], must be equipped with an AEB system that meets the requirements of FMVSS No. 128.
(c) Commercial motor vehicles manufactured on and after [the first September 1 that is 5 years after the date of publication of a final rule]. Trucks and buses, with a GVWR greater than 4,536 kilograms (10,000 pounds) and truck tractors manufactured on or after [ the first September 1 that is 5 years after the date of publication of a final rule ] (except trucks, buses, and truck tractors engaged in driveaway-towaway), must be equipped with an AEB system that meets the requirements of Federal Motor Vehicle Safety Standard No. 128 (49 CFR 571.128).
(d) AEB Malfunction Detection. Each commercial motor vehicle subject to FMVSS No. 128 must be equipped with a telltale that meets the requirements of S5.3 of FMVSS No. 128 (49 CFR 571.128), mounted in front of and in clear view of the driver, which is activated whenever there is a malfunction that affects the generation or transmission of control or response signals in the vehicle's AEB system.
PART 396—INSPECTION, REPAIR, AND MAINTENANCE
5. The authority citation for 49 CFR part 396 is amended to read as follows:
Authority:
49 U.S.C. 504, 31133, 31136, 31151, 31502; sec. 32934, Pub. L. 112–141, 126 Stat. 405, 830; sec. 5524, Pub. L. 114–94, 129 Stat. 1312, 1560; sec. 23010, Pub. L. 117–58, 135 Stat. 429, 766–767 and 49 CFR 1.87.
6. Amend Appendix A to Part 396 by adding paragraphs 1.n. and o to read as follows:
Appendix A to Part 396—Minimum Periodic Inspection Standards
* * * * *
1. Brake System
n. Electronic Stability Control (ESC) System.
(1) Missing ESC malfunction detection components.
(2) The ESC malfunction telltale must be identified by the symbol shown for “Electronic Stability Control System Malfunction” or the specified words or abbreviations listed in Table 1 of Standard No. 101 (§571.101).
(3) The ESC malfunction telltale must be activated as a check-of-lamp function either when the ignition locking system is turned to the “On” (“Run”) position when the engine is not running, or when the ignition locking system is in a position between the “On” (“Run”) and “Start” that is designated by the manufacturer as a check-light position.
(4) Other missing or inoperative ESC system components.
o. Automatic Emergency Braking (AEB).
(1) Missing AEB malfunction telltale components ( e.g., bulb/LED, wiring, etc.).
(2) AEB malfunction telltale that does not illuminate while power is continuously applied during initial powerup.
(3) AEB malfunction telltale that stays illuminated while power is continuously applied during normal vehicle operation.
(4) Other missing or inoperative AEB components.
* * * * *
PART 571—FEDERAL MOTOR VEHICLE SAFETY STANDARDS
7. The authority citation for part 571 continues to read as follows:
Authority:
49 U.S.C. 322, 30111, 30115, 30117 and 30166; delegation of authority at 49 CFR 1.95.
7. Amend §571.5 by:
a. Revising paragraph (d)(34);
b. Redesignating paragraphs (l)(49) and (50) as paragraphs (l)(50) and (51), respectively; and
c. Adding new paragraph (l)(49).
The revision and addition read as follows:
§571.5 Matter incorporated by reference
* * * * *
(d) * * *
(34) ASTM E1337–19, “Standard Test Method for Determining Longitudinal Peak Braking Coefficient (PBC) of Paved Surfaces Using Standard Reference Test Tire,” approved December 1, 2019, into §§571.105; 571.121; 571.122; 571.126; 571.128; 571.135; 571.136; 571.500.
* * * * *
(l) * * *
(49) SAE J2400, “Human Factors in Forward Collision Warning System: Operating Characteristics and User Interface Requirements,” August 2003 into §571.128.
* * * * *
9. Add §571.128 to read as follows:
§571.128 Standard No. 128; Automatic emergency braking systems for heavy vehicles.
S1. Scope. This standard establishes performance requirements for automatic emergency braking (AEB) systems for heavy vehicles.
S2. Purpose. The purpose of this standard is to reduce the number of deaths and injuries that result from crashes in which drivers do not apply the brakes or fail to apply sufficient braking power to avoid or mitigate a crash.
S3. Application. This standard applies to multipurpose passenger vehicles, trucks, and buses with a gross vehicle weight rating greater than 4,536 kilograms (10,000 pounds) that are subject to §§571.105 or 571.121 of this part.
S4. Definitions.
Adaptive cruise control system is an automatic speed control system that allows the equipped vehicle to follow a lead vehicle at a pre-selected gap by controlling the engine, power train, and service brakes.
Ambient illumination is the illumination as measured at the test surface, not including any illumination provided by the subject vehicle.
Automatic emergency braking ( AEB) system is a system that detects an imminent collision with vehicles, objects, and road users in or near the path of a vehicle and automatically controls the vehicle's service brakes to avoid or mitigate the collision.
Brake pedal application onset is when the brake controller begins to displace the brake pedal.
Forward collision warning is an auditory and visual warning provided to the vehicle operator by the AEB system that is designed to induce an immediate forward crash avoidance response by the vehicle operator.
Forward collision warning onset is the first moment in time when a forward collision warning is provided.
Headway is the distance between the lead vehicle's rearmost plane normal to its centerline and the subject vehicle's frontmost plane normal to its centerline.
Lead vehicle is a vehicle test device facing the same direction and preceding a subject vehicle within the same travel lane.
Lead vehicle braking onset is the point at which the lead vehicle achieves a deceleration of 0.05g due to brake application.
Over-the-road bus means a bus characterized by an elevated passenger deck located over a baggage compartment, except a school bus.
Perimeter-seating bus means a bus with 7 or fewer designated seating positions rearward of the driver's seating position that are forward-facing or can convert to forward-facing without the use of tools and is not an over-the-road bus.
Small-volume manufacturer means an original vehicle manufacturer that produces or assembles fewer than 5,000 vehicles annually for sales in the United States.
Steel trench plate is a rectangular steel plate often used in road construction to temporarily cover sections of pavement unsafe to drive over directly.
Subject vehicle is the vehicle under examination for compliance with this standard.
Transit bus means a bus that is equipped with a stop-request system sold for public transportation provided by, or on behalf of, a State or local government and that is not an over-the-road bus.
Travel path is the path projected onto the road surface of a point located at the intersection of the subject vehicle's frontmost vertical plane and longitudinal vertical center plane, as the subject vehicle travels forward.
Vehicle test device is a device meeting the specifications set forth in subpart C of 49 CFR part 596.
S5. Requirements.
(a) Truck tractors and buses with a GVWR greater than 11,793 kilograms (26,000 pounds), other than school buses, perimeter-seating buses, and transit buses and which are manufactured on or after [the first September 1 that is three years after the date of publication of a final rule] must meet the requirements of this standard.
(b) Vehicles with a GVWR greater than 4,536 kilograms (10,000 pounds) which are manufactured on or after [the first September 1 that is four years after the date of publication of a final rule] must meet the requirements of this standard.
(c) The requirements of paragraphs (a) and (b) of this section S5 do not apply to small-volume manufacturers, final-stage manufacturers and alterers until one year after the dates specified in those paragraphs.
S5.1. Requirements when approaching a lead vehicle.
S5.1.1. Forward Collision Warning. A vehicle is required to have a forward collision warning system, as defined in S4 of this section, that provides an auditory and visual signal to the driver of an impending collision with a lead vehicle when traveling at any forward speed greater than 10 km/h (6.2 mph). The auditory signal must have a high fundamental frequency of at least 800 Hz, a duty cycle of 0.25—0.95, and tempo in the range of 6–12 pulses per second. The visual signal must be located according to SAE J2400 (incorporated by reference, see §571.5), paragraph 4.1.14, and must include the symbol in the bottom right of paragraph 4.1.16. Line of sight is based on the forward-looking eye midpoint (M f ) as described in S14.1.5 of §571.111. The symbol must be red in color and steady-burning.
S5.1.2. Automatic Emergency Braking. A vehicle is required to have an automatic emergency braking system, as defined in S4 of this section, that applies the service brakes automatically when a collision with a lead vehicle is imminent. The system must operate when the vehicle is traveling at any forward speed greater than 10 km/h (6.2 mph).
S5.1.3. Performance Test Requirements. The vehicle must provide a forward collision warning and subsequently apply the service brakes automatically when a collision with a lead vehicle is imminent such that the subject vehicle does not collide with the lead vehicle when tested using the procedures in S7. The forward collision warning is not required if adaptive cruise control is engaged.
S5.2. False Activation. The vehicle must not automatically apply braking that results in peak deceleration of 0.25g or greater when manual braking is not applied, nor a peak deceleration of 0.45g or greater when manual braking is applied, when tested using the procedures in S8.
S5.3. Malfunction Detection. The system must continuously detect system malfunctions, including malfunctions caused solely by sensor obstructions. If the system detects a malfunction that prevents the system from meeting the requirements specified in S5.1 or S5.2, the system must provide the vehicle operator with a telltale that the malfunction exists.
S6. Test Conditions.
S6.1. Environmental conditions.
S6.1.1. Temperature. The ambient temperature is any temperature between 2 °C and 40 °C.
S6.1.2. Wind. The maximum wind speed is no greater than 5 m/s (11 mph) during tests approaching a lead vehicle.
S6.1.3. Ambient Lighting.
(a) The ambient illumination on the test surface is any level at or above 2,000 lux.
(b) Testing is not performed while driving toward or away from the sun such that the horizontal angle between the sun and a vertical plane containing the centerline of the subject vehicle is less than 25 degrees and the solar elevation angle is less than 15 degrees.
S6.1.4. Precipitation. Testing is not conducted during periods of precipitation or when visibility is affected by fog, smoke, ash, or other particulate.
S6.2. Road conditions.
S6.2.1. Test Track Surface and Construction. The tests are conducted on a dry, uniform, solid-paved surface. Surfaces with debris, irregularities, or undulations, such as loose pavement, large cracks, or dips are not used.
S6.2.2. Surface Friction. The road test surface produces a peak friction coefficient (PFC) of 1.02 when measured using an ASTM International (ASTM) F2493 standard reference test tire, in accordance with ASTM E1337–19 (incorporated by reference, see §571.5), at a speed of 64 km/h (40 mph), without water delivery.
S6.2.3. Slope. The test surface has any consistent slope between 0 percent and 1 percent.
S6.2.4. Markings. The road surface within 2.3 m of the intended travel path is marked with zero, one, or two lines of any configuration or color. If one line is used, it is straight. If two lines are used, they are straight, parallel to each other, and at any distance from 2.7 m to 4.5 m apart.
S6.2.5. Obstructions. Testing is conducted such that the vehicle does not travel beneath any overhead structures, including but not limited to overhead signs, bridges, or gantries. No vehicles, obstructions, or stationary objects are within 7.4 m of either side of the intended travel path except as specified.
S6.3. Subject vehicle conditions.
S6.3.1. Malfunction notification. Testing is not conducted while the AEB malfunction telltale specified in S5.3 is illuminated.
S6.3.2. Sensor obstruction. All sensors used by the system and any part of the vehicle immediately ahead of the sensors, such as plastic trim, the windshield, etc., are free of debris or obstructions.
S6.3.3. Tires. The vehicle is equipped with the original tires present at the time of initial sale. The tires are inflated to the vehicle manufacturer's recommended cold tire inflation pressure(s) specified on the vehicle's placard or the tire inflation pressure label.
S6.3.4. Brake burnish.
(a) Vehicles subject to §571.105 are burnished in accordance with S7.4 of that section.
(b) Vehicles subject to §571.121 are burnished in accordance with S6.1.8 of that section.
S6.3.5. Brake temperature. The average temperature of the service brakes on the hottest axle of the vehicle during testing, measured according to S6.1.16 of §571.121, is between 66°C and 204°C prior to braking.
S6.3.6. Fluids. All non-consumable fluids for the vehicle are at 100 percent capacity. All consumable fluids are at any level from 5 to 100 percent capacity.
S6.3.7. Propulsion battery charge. The propulsion batteries are charged at any level from 5 to 100 percent capacity.
S6.3.8. Cruise control. Cruise control, including adaptive cruise control, is configured under any available setting.
S6.3.9. Adjustable forward collision warning. Forward collision warning is configured in any operator-configurable setting.
S6.3.10. Engine braking. A vehicle equipped with an engine braking system that is engaged and disengaged by the operator is tested with the system in any selectable configuration.
S6.3.11. Regenerative braking. Regenerative braking is configured under any available setting.
S6.3.12. Liftable Axles. A vehicle with one or more liftable axles is tested with the liftable axles down.
S6.3.13. Headlamps. Testing is conducted with the headlamp control in any selectable position.
S6.3.14. Subject vehicle loading.
(a) Except as provided in S6.3.14(b), the vehicle is loaded to its GVWR so that the load on each axle, measured at the tire-ground interface, is most nearly proportional to the axles' respective GAWRs, without exceeding the GAWR of any axle.
(b) Truck tractors.
(1) A truck tractor is loaded to its GVWR with the operator and test instrumentation, and by coupling it to a control trailer as provided in S6.3.14(b)(2) of this section and placing ballast (weight) on the control trailer which loads the tractor's non-steer axles. The control trailer is loaded with ballast without exceeding the GAWR of the trailer axle. The location of the center of gravity of the ballast on the control trailer is directly above the kingpin. The height of the center of gravity of the ballast on the control trailer is less than 610 mm (24 inches) above the top of the tractor's fifth-wheel hitch (the area where the truck tractor attaches to the trailer). If the tractor's fifth-wheel hitch position is adjustable, the fifth-wheel hitch is adjusted to proportionally distribute the load on each of the tractor's axle(s), according to each axle's GAWR, without exceeding the GAWR of any axle(s). If the fifth-wheel hitch position cannot be adjusted to prevent the load from exceeding the GAWR of the tractor's axle(s), the ballast is reduced until the axle load is equal to or less than the GAWR of the tractor's rear axle(s), maintaining load proportioning as close as possible to specified proportioning.
(2) The control trailer is an unbraked, flatbed semi-trailer that has a single axle with a GAWR of 8,165 kilograms (18,000 pounds). The control trailer has a length of at least 6,400 mm (252 inches), but no more than 7,010 mm (276 inches), when measured from the transverse centerline of the axle to the centerline of the kingpin (the point where the trailer attaches to the truck tractor). At the manufacturer's option, truck tractors with four or more axles may use a control trailer with a length of more than 7,010 mm (276 inches), but no more than 13,208 mm (520 inches) when measured from the transverse centerline of the axle to the centerline of the kingpin.
S6.3.15. AEB system initialization. The vehicle is driven at a speed of 10 km/h or higher for at least one minute prior to testing, and subsequently the starting system is not cycled off prior to testing.
S6.4. Equipment and test Devices.
S6.4.1. The vehicle test device is specified in 49 CFR part 596 subpart C. Local fluttering of the lead vehicle's external surfaces does not exceed 10 mm perpendicularly from the reference surface, and distortion of the lead vehicle's overall shape does not exceed 25 mm in any direction.
S6.4.2. The steel trench plate used for the false activation test has the dimensions 2.4 m x 3.7 m x 25 mm and is made of ASTM A36 steel. Any metallic fasteners used to secure the steel trench plate are flush with the top surface of the steel trench plate.
S7. Testing when approaching a lead vehicle.
S7.1. Setup.
(a) The testing area is set up in accordance with Figure 1 to this section.
(b) Testing is conducted during daylight.
(c) For reference, Table 1 to S7.1 specifies the subject vehicle speed (V SV ), lead vehicle speed (V LV ), headway, and lead vehicle deceleration for each test that may be conducted.
(d) The intended travel path of the vehicle is a straight line toward the lead vehicle from the location corresponding to a headway of L 0 .
(e) If the road surface is marked with a single or double lane line, the intended travel path is parallel to and 1.8 m from the inside of the closest line. If the road surface is marked with two lane lines bordering the lane, the intended travel path is centered between the two lines.
(f) For each test run conducted, the subject vehicle speed (V SV ), lead vehicle speed (V LV ), headway, and lead vehicle deceleration will be selected from the ranges specified.
| Test scenarios | Speed (km/h) | Headway (m) | Lead vehicle decel (g) | Manual brake application | |
| V SV | V LV | ||||
| Stopped Lead Vehicle | Any 10–80 | 0 | no. | ||
| Any 70–100 | 0 | yes. | |||
| Slower-Moving Lead Vehicle | Any 40–80 | 20 | no. | ||
| Any 70–100 | 20 | yes. | |||
| Decelerating Lead Vehicle | 50 | 50 | Any 21–40 | Any 0.3–0.4 | no. |
| 50 | 50 | Any 21–40 | Any 0.3–0.4 | yes. | |
| 80 | 80 | Any 28–40 | Any 0.3–0.4 | no. | |
| 80 | 80 | Any 28–40 | Any 0.3–0.4 | yes. | |
S7.2. Headway calculation. For each test run conducted under S7.3 and S7.4, the headway ( L ), in meters, providing 5 seconds time to collision ( TTC ) is calculated. L is determined with the following equation where V is the speed of the subject vehicle in m/s and V is the speed of the lead vehicle in m/s:
L = TTC 0 × ( V − V )
TTC 0 = 5
S7.3. Stopped lead vehicle.
S7.3.1. Test parameters.
(a) For testing with no subject vehicle manual brake application, the subject vehicle test speed is any speed between 10 km/h and 80 km/h, and the lead vehicle speed is 0 km/h.
(b) For testing with manual brake application of the subject vehicle, the subject vehicle test speed is any speed between 70 km/h and 100 km/h, and the lead vehicle speed is 0 km/h.
S7.3.2. Test conduct prior to forward collision warning onset.
(a) The lead vehicle is placed stationary with its longitudinal centerline coincident to the intended travel path.
(b) Before the headway corresponds to L 0 , the subject vehicle is driven at any speed, in any direction, on any road surface, for any amount of time.
(c) The subject vehicle approaches the rear of the lead vehicle.
(d) Beginning when the headway corresponds to L 0 , the subject vehicle speed is maintained within 1.6 km/h of the test speed with minimal and smooth accelerator pedal inputs.
(e) Beginning when the headway corresponds to L 0 , the subject vehicle heading is maintained with minimal steering input such that the travel path does not deviate more than 0.3 m laterally from the intended travel path and the subject vehicle's yaw rate does not exceed ±1.0 deg/s.
S7.3.3. Test conduct after forward collision warning onset.
(a) The accelerator pedal is released at any rate such that it is fully released within 500 ms. This action is omitted for vehicles tested with cruise control active.
(b) For testing conducted with manual brake application, the service brakes are applied as specified in S9. The onset of brake pedal application occurs 1.0 ± 0.1 second after forward collision warning onset.
(c) For testing conducted without manual brake application, no manual brake application is made until the test completion criteria of S7.3.4 are satisfied.
S7.3.4. Test completion criteria. The test run is complete when the subject vehicle comes to a complete stop without making contact with the lead vehicle or when the subject vehicle makes contact with the lead vehicle.
S7.4. Slower-moving lead vehicle.
S7.4.1. Test parameters.
(a) For testing with no subject vehicle manual brake application, the subject vehicle test speed is any speed between 40 km/h and 80 km/h, and the lead vehicle speed is 20 km/h.
(b) For testing with manual brake application of the subject vehicle, the subject vehicle test speed is any speed between 70 km/h and 100 km/h, and the lead vehicle speed is 20 km/h.
S7.4.2. Test conduct prior to forward collision warning onset.
(a) The lead vehicle is propelled forward in a manner such that the longitudinal center plane of the lead vehicle does not deviate laterally more than 0.3m from the intended travel path.
(b) The subject vehicle approaches the lead vehicle.
(c) Beginning when the headway corresponds to L 0 , the subject vehicle and lead vehicle speed is maintained within 1.6 km/h of the test speed with minimal and smooth accelerator pedal inputs.
(d) Beginning when the headway corresponds to L 0 , the subject vehicle and lead vehicle headings are maintained with minimal steering input such that the subject vehicle's travel path does not deviate more than 0.3 m laterally from the centerline of the lead vehicle, and the yaw rate of the subject vehicle does not exceed ±1.0 deg/s prior to forward collision warning onset.
S7.4.3. Test conduct after forward collision warning onset.
(a) The subject vehicle's accelerator pedal is released at any rate such that it is fully released within 500 ms. This action is omitted for vehicles tested with cruise control active.
(b) For testing conducted with manual braking application, the service brakes are applied as specified in S9. The onset of brake pedal application is 1.0 ± 0.1 second after the forward collision warning onset.
(c) For testing conducted without manual braking application, no manual brake application is made until the test completion criteria of S7.4.4 are satisfied.
S7.4.4. Test completion criteria. The test run is complete when the subject vehicle speed is less than or equal to the lead vehicle speed without making contact with the lead vehicle or when the subject vehicle makes contact with the lead vehicle.
S7.5. Decelerating lead vehicle.
S7.5.1. Test parameters.
(a) The subject vehicle test speed is 50 km/h or 80 km/h, and the lead vehicle speed is identical to the subject vehicle test speed.
(b) [Reserved]
S7.5.2. Test conduct prior to lead vehicle braking onset.
(a) Before the 1 second prior to lead vehicle braking onset, the subject vehicle is driven at any speed, in any direction, on any road surface, for any amount of time.
(b) Between 1 second prior to lead vehicle braking onset and lead vehicle braking onset:
(1) The lead vehicle is propelled forward in a manner such that the longitudinal center plane of the vehicle does not deviate laterally more than 0.3 m from the intended travel path.
(2) The subject vehicle follows the lead vehicle at a headway of any distance between 21 m and 40 m if the subject vehicle test speed is 50 km/h, or any distance between 28 m and 40 m if the subject vehicle test speed is 80 km/h.
(3) The subject vehicle's speed is maintained within 1.6 km/h of the test speed with minimal and smooth accelerator pedal inputs prior to forward collision warning onset.
(4) The lead vehicle's speed is maintained within 1.6 km/h.
(5) The subject vehicle and lead vehicle headings are maintained with minimal steering input such that their travel paths do not deviate more than 0.3 m laterally from the centerline of the lead vehicle, and the yaw rate of the subject vehicle does not exceed ±1.0 deg/s until forward collision warning onset.
S7.5.3. Test conduct following lead vehicle braking onset.
(a) The lead vehicle is decelerated to a stop with a targeted average deceleration of any value between 0.3g and 0.4g. The targeted deceleration magnitude is achieved within 1.5 seconds of lead vehicle braking onset and is maintained until 250 ms prior to coming to a stop.
(b) After forward collision warning onset, the subject vehicle's accelerator pedal is released at any rate such that it is fully released within 500 ms. This action is omitted for vehicles with cruise control active.
(c) For testing conducted with manual braking application, the service brakes are applied as specified in S9. The brake pedal application onset occurs 1.0 ± 0.1 second after the forward collision warning onset.
(d) For testing conducted without manual braking application, no manual brake application is made until the test completion criteria of S7.5.4 are satisfied.
S7.5.4. Test completion criteria. The test run is complete when the subject vehicle comes to a complete stop without making contact with the lead vehicle or when the subject vehicle makes contact with the lead vehicle.
S8. False AEB activation.
S8.1. Headway calculation. For each test run to be conducted under S8.2 and S8.3, the headway ( L , L , L ), in meters, between the front plane of the subject vehicle and either the steel trench plate's leading edge or the rearmost plane normal to the centerline of the vehicle test devices providing 5.0 seconds, 2.1 seconds, and 1.1 seconds time to collision (TTC) is calculated. L , L , and L are determined with the following equation where V is the speed of the subject vehicle in m/s:
L = TTC x × ( V )
TTC 0 = 5.0
TTC 2.1 = 2.1
TTC 1.1 = 1.1
S8.2. Steel trench plate.
S8.2.1. Test parameters and setup.
(a) The testing area is set up in accordance with Figure 2 to this section.
(b) The steel trench plate is secured flat on the test surface so that its longest side is parallel to the subject vehicle's intended travel path and horizontally centered on the subject vehicle's intended travel path.
(c) The subject vehicle test speed is 80 km/h.
S8.2.2. Test conduct.
(a) The subject vehicle approaches the steel trench plate.
(b) Beginning when the headway corresponds to L 0 , the subject vehicle speed is maintained within 1.6 km/h of the test speed with minimal and smooth accelerator pedal inputs.
(c) Beginning when the headway corresponds to L 0 , the subject vehicle heading is maintained with minimal steering input such that the travel path does not deviate more than 0.3 m laterally from the intended travel path, and the yaw rate of the subject vehicle does not exceed ±1.0 deg/s.
(d) If forward collision warning occurs, the subject vehicle's accelerator pedal is released at any rate such that it is fully released within 500 ms. This action is omitted for vehicles with cruise control active.
(e) For tests where no manual brake application occurs, manual braking is not applied until the test completion criteria of S8.2.3 are satisfied.
(f) For tests where manual brake application occurs, the subject vehicle's accelerator pedal, if not already released, is released when the headway corresponds to L 2.1 at any rate such that it is fully released within 500 ms.
(g) For tests where manual brake application occurs, the service brakes are applied as specified in S9. The brake application pedal onset occurs at headway L 1.1 .
S8.2.3. Test completion criteria. The test run is complete when the subject vehicle comes to a stop prior to crossing over the leading edge of the steel trench plate or when the subject vehicle crosses over the leading edge of the steel trench plate.
S8.3. Pass-through.
S8.3.1. Test parameters and setup.
(a) The testing area is set up in accordance with Figure 3 to this section.
(b) Two vehicle test devices are secured in a stationary position parallel to one another with a lateral distance of 4.5 m ±0.1 m between the vehicles' closest front wheels. The centerline between the two vehicles is parallel to the intended travel path.
(c) The subject vehicle test speed is 80 km/h.
(d) Testing may be conducted with manual subject vehicle pedal application.
S8.3.2. Test conduct.
(a) The subject vehicle approaches the gap between the two vehicle test devices.
(b) Beginning when the headway corresponds to L 0 , the subject vehicle speed is maintained within 1.6 km/h with minimal and smooth accelerator pedal inputs.
(c) Beginning when the headway corresponds to L 0 , the subject vehicle heading is maintained with minimal steering input such that the travel path does not deviate more than 0.3 m laterally from the intended travel path, and the yaw rate of the subject vehicle does not exceed ±1.0 deg/s.
(d) If forward collision warning occurs, the subject vehicle's accelerator pedal is released at any rate such that it is fully released within 500 ms.
(e) For tests where no manual brake application occurs, manual braking is not applied until the test completion criteria of S8.3.3 are satisfied.
(f) For tests where manual brake application occurs, the subject vehicle's accelerator pedal, if not already released, is released when the headway corresponds to L 2.1 at any rate such that it is fully released within 500 ms.
(g) For tests where manual brake application occurs, the service brakes are applied as specified in S9. The brake application onset occurs when the headway corresponds to L 1.1 .
S8.3.3. Test completion criteria. The test run is complete when the subject vehicle comes to a stop prior to its rearmost point passing the vertical plane connecting the forwardmost point of the vehicle test devices or when the rearmost point of the subject vehicle passes the vertical plane connecting the forwardmost point of the vehicle test devices.
S9. Subject Vehicle Brake Application Procedure.
S9.1. The procedure begins with the subject vehicle brake pedal in its natural resting position with no preload or position offset.
S9.2. At the option of the manufacturer, either displacement feedback or hybrid feedback control is used.
S9.3. Displacement feedback procedure. For displacement feedback, the commanded brake pedal position is the brake pedal position that results in a mean deceleration of 0.3g in the absence of AEB system activation.
(a) The mean deceleration is the deceleration over the time from the pedal achieving the commanded position to 250 ms before the vehicle comes to a stop.
(b) The pedal displacement controller depresses the pedal at a rate of 254 mm/s ±25.4 mm/s to the commanded brake pedal position.
(c) The pedal displacement controller may overshoot the commanded position by any amount up to 20 percent. If such an overshoot occurs, it is corrected within 100 ms.
(d) The achieved brake pedal position is any position within 10 percent of the commanded position from 100 ms after pedal displacement occurs and any overshoot is corrected.
S9.4. Hybrid brake pedal feedback procedure. For hybrid brake pedal feedback, the commanded brake pedal application is the brake pedal position and a subsequent commanded brake pedal force that results in a mean deceleration of 0.3g in the absence of AEB system activation.
(a) The mean deceleration is the deceleration over the time from the pedal achieving the commanded position to 250 ms before the vehicle comes to a stop.
(b) The hybrid controller displaces the pedal at a rate of 254 mm/s ±25.4 mm/s to the commanded pedal position.
(c) The hybrid controller may overshoot the commanded position by any amount up to 20 percent. If such an overshoot occurs, it is corrected within 100 ms.
(d) The hybrid controller begins to control the force applied to the pedal and stops controlling pedal displacement 100 ms after pedal displacement occurs and any overshoot is corrected.
(e) The hybrid controller applies a pedal force of at least 11.1 N.
(f) The applied pedal force is maintained within 10 percent of the commanded brake pedal force from 350 ms after commended pedal displacement occurs and any overshoot is corrected until test completion.
Figure 1 to §571.128—Setup for Tests Approaching a Lead Vehicle
BILLING CODE 4910–59–P
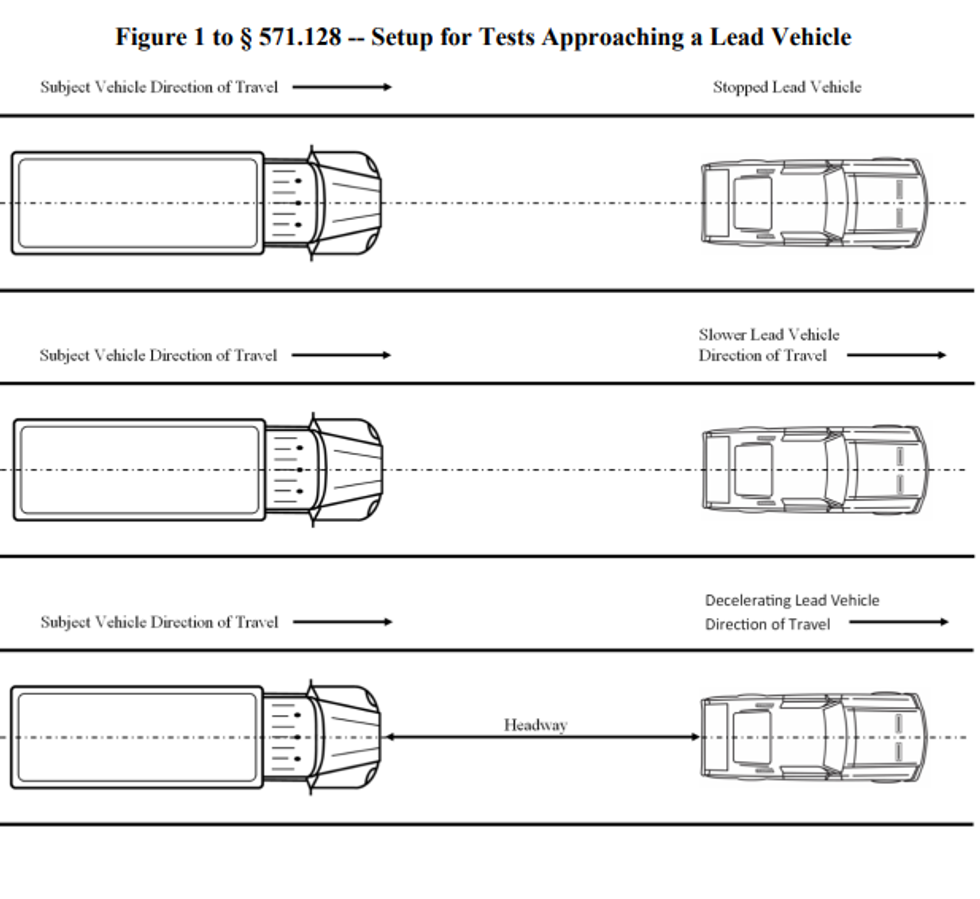
Figure 2 to §571.128—Setup for Steel Trench Plate False Activation Tests
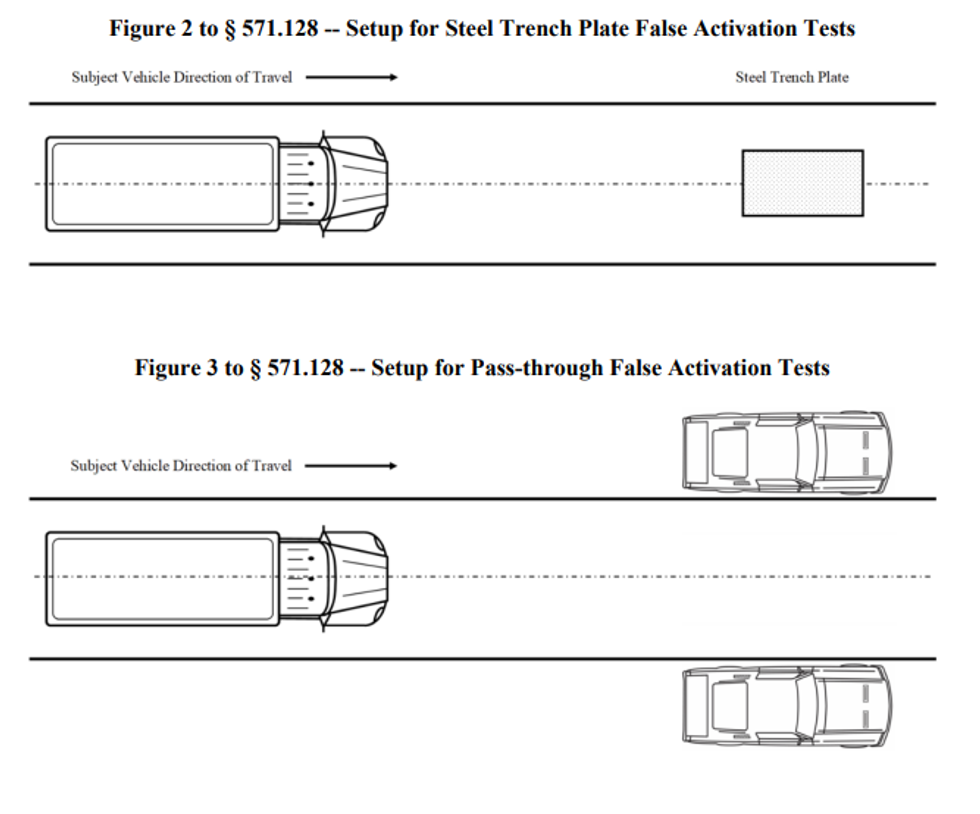
BILLING CODE 4910–59–C
9. Amend §571.136 by revising paragraphs S3, S3.1, S3.2, and paragraphs (1) and (2) of the definition of “Electronic stability control system or ESC system” in S4, and adding S8.3 to read as follows:
§571.136 Standard No. 136; Electronic stability control systems for heavy vehicles.
* * * * *
S3 Application.
S3.1 This standard applies to passenger cars, multipurpose passenger vehicles, trucks, and buses, with a GVWR greater than 4,536 kilograms (10,000 pounds) except:
(a) Any vehicle equipped with an axle that has a gross axle weight rating of 13,154 kilograms (29,000 pounds) or more;
(b) Any truck or bus that has a speed attainable in 3.2 kilometers (2 miles) of not more than 53 km/h (33 mph); and
(c) Any truck that has a speed attainable in 3.2 kilometers (2 miles) of not more than 72 km/h (45 mph), an unloaded vehicle weight that is not less than 95 percent of its gross vehicle weight rating, and no capacity to carry occupants other than the driver and operating crew.
S3.2 The following vehicles are subject only to the requirements in S5.1, S5.2, and S5.4 of this standard:
(a) Vehicles with a gross vehicle weight rating of 11,793 kilograms (26,000 pounds) or less;
(b) Trucks other than truck tractors;
(c) School buses;
(d) Perimeter-seating buses;
(e) Transit buses;
(f) Passenger cars; and
(g) Multipurpose passenger vehicles.
* * * * *
S4 Definitions
* * * * *
Electronic stability control system or ESC system means a system that has all of the following attributes:
(1) It augments vehicle directional stability by having the means to apply and adjust the vehicle brake torques individually at each wheel position on at least one front and at least one rear axle of the vehicle to induce correcting yaw moment to limit vehicle oversteer and to limit vehicle understeer;
(2) It enhances rollover stability by having the means to apply and adjust the vehicle brake torques individually at each wheel position on at least one front and at least one rear axle of the vehicle to reduce lateral acceleration of a vehicle;
* * * * *
S8.3 Vehicles with a gross vehicle weight rating of 11,793 kilograms (26,000 pounds) or less, trucks other than truck tractors, school buses, perimeter-seating buses, transit buses, passenger cars, and multipurpose passenger vehicles are not required to comply this standard before [the first September 1 that is four years after the date of publication of a final rule].
* * * * *
11. Add part 596 to read as follows.
PART 596—AUTOMATIC EMERGENCY BRAKING TEST DEVICES
Subpart A—General
Sec.
596.1 Scope.
596.2 Purpose.
596.3 Application
596.4 Definitions.
596.5 Matter incorporated by reference.
Subpart B—[Reserved]
Subpart C—Vehicle Test Device
596.9 General Description
596.10 Specifications for the Vehicle Test Device
Authority:
49 U.S.C. 322, 30111, 30115, 30117 and 30166; delegation of authority at 49 CFR 1.95.
Subpart A—General
§596.1 Scope.
This part describes the test devices that are to be used for compliance testing of motor vehicles with motor vehicle safety standards for automatic emergency braking.
§596.2 Purpose.
The design and performance criteria specified in this part are intended to describe devices with sufficient precision such that testing performed with these test devices will produce repetitive and correlative results under similar test conditions to reflect adequately the automatic emergency braking performance of a motor vehicle.
§596.3 Application.
This part does not in itself impose duties or liabilities on any person. It is a description of tools that are used in compliance tests to measure the performance of automatic emergency braking systems required by the safety standards that refer to these tools. This part is designed to be referenced by, and become part of, the test procedures specified in motor vehicle safety standards.
§596.4
Definitions.
All terms defined in section 30102 of the National Traffic and Motor Vehicle Safety Act (49 U.S.C. chapter 301, et seq. ) are used in their statutory meaning.
Vehicle Test Device means a test device that simulates a passenger vehicle for the purpose of testing automatic emergency brake system performance.
Vehicle Test Device Carrier means a movable platform on which a Lead Vehicle Test Device may be attached during compliance testing.
§596.5 Matter incorporated by reference.
(a) Certain material is incorporated by reference into this part with the approval of the Director of the Federal Register under 5 U.S.C. 552(a) and 1 CFR part 51. To enforce any edition other than that specified in this section, the National Highway Traffic Safety Administration (NHTSA) must publish notice of change in the Federal Register and the material must be available to the public. All approved material is available for inspection at NHTSA at the National Archives and Records Administration (NARA). Contact NHTSA at: NHTSA Office of Technical Information Services, 1200 New Jersey Avenue SE, Washington, DC 20590; (202) 366–2588. For information on the availability of this material at NARA, visit www.archives.gov/federal-register/cfr/ibr-locations.html or email fr.inspection@nara.gov. The material may be obtained from the source(s) in the following paragraph of this section.
(b) International Organization for Standardization (ISO), 1, ch. de la Voie-Creuse, CP 56, CH–1211 Geneva 20, Switzerland; phone: 41 22 749 01 11; fax: 41 22 733 34 30; website: www.iso.org/.
(1) [Reserved].
(2) [Reserved].
(3) ISO 19206–3:2021(E), “Test devices for target vehicles, vulnerable road users and other objects, for assessment of active safety functions—Part 3: Requirements for passenger vehicle 3D targets,” First edition, 2021–05; into §596.10.
(4) [Reserved]
Subpart B—[Reserved]
Subpart C—Vehicle Test Device
§596.9 General Description.
(a) The Vehicle Test Device provides a sensor representation of a passenger motor vehicle.
(b) The rear view of the Vehicle Test Device contains representations of the vehicle silhouette, a rear window, a high-mounted stop lamp, two taillamps, a rear license plate, two rear reflex reflectors, and two tires.
§596.10 Specifications for the Vehicle Test Device.
(a) Word Usage—Recommendations. The words “recommended,” “should,” “can be,” or “should be” appearing in sections of ISO 19206–3:2021(E) (incorporated by reference, see §596.5), referenced in this section, are read as setting forth specifications that are used.
(b) Word Usage—Options. The words “may be,” or “either,” used in connection with a set of items appearing in sections of ISO 19206–3:2021(E) (incorporated by reference, see §596.5), referenced in this section, are read as setting forth the totality of items, any one of which may be selected by NHTSA for testing.
(c) Dimensional specifications. (1) The rear silhouette and the rear window are symmetrical about a shared vertical centerline.
(2) Representations of the taillamps, rear reflex reflectors, and tires are symmetrical about the surrogate's centerline.
(3) The license plate representation has a width of 300 ± 15 mm and a height of 150 ± 15 mm and mounted with a license plate holder angle within the range described in 49 CFR 571.108 S6.6.3.1.
(4) The Vehicle Test Device representations are located within the minimum and maximum measurement values specified in columns 3 and 4 of Tables A.4 of ISO 19206–3:2021(E) Annex A (incorporated by reference, see §596.5). The tire representations are located within the minimum and maximum measurement values specified in columns 3 and 4 of Tables A.3 of ISO 19206–3:2021(E) Annex A (incorporated by reference, see §596.5). The terms “rear light” means “taillamp,” “retroreflector” means “reflex reflector,” and “high centre taillight” means “high-mounted stop lamp.”
(d) Visual and near infrared specification. (1) The Vehicle Test Device rear representation colors are within the ranges specified in Tables B.2 and B.3 of ISO 19206–3:2021(E) Annex B (incorporated by reference, see §596.5).
(2) The rear representation infrared properties of the Vehicle Test Device are within the ranges specified in Table B.1 of ISO 19206–3:2021(E) Annex B (incorporated by reference, see §596.5) for wavelengths of 850 to 950 nm when measured according to the calibration and measurement setup specified in paragraph B.3 of ISO 19206–3:2021(E) Annex B (incorporated by reference, see §596.5).
(3) The Vehicle Test Device rear reflex reflectors, and at least 50 cm 2 of the taillamp representations are grade DOT–C2 reflective sheeting as specified in 49 CFR 571.108 S8.2.
(e) Radar reflectivity specifications. (1) The radar cross section of the Vehicle Test Device is measured with it attached to the carrier (robotic platform). The radar reflectivity of the carrier platform is less than 0 dBm 2 for a viewing angle of 180 degrees and over a range of 5 to 100 m when measured according to the radar measurement procedure specified in C.3 of ISO 19206–3:2021(E) Annex C (incorporated by reference, see §596.5) for fixed-angle scans.
(2) The rear bumper area as shown in Table C.1 of ISO 19206–3:2021(E) Annex C (incorporated by reference, see §596.5) contributes to the target radar cross section.
(3) The radar cross section is assessed using radar sensor that operates at 76 to 81 GHz and has a range of at least 5 to 100 m, a range gate length smaller than 0.6m, a horizontal field of view of 10 degrees or more (−3dB amplitude limit), and an elevation field of view of 5 degrees or more (−3dB amplitude).
(4) At least 92 percent of the filtered data points of the surrogate radar cross section for the fixed vehicle angle, variable range measurements are within the RCS boundaries defined in Sections C.2.2.4 of ISO 19206–3:2021(E) Annex C (incorporated by reference, see §596.5) for a viewing angle of 180 degrees when measured according to the radar measurement procedure specified in C.3 of ISO 19206–3:2021(E) Annex C (incorporated by reference, see §596.5) for fixed-angle scans.
(5) Between 86 to 95 percent of the Vehicle Test Device spatial radar cross section reflective power is with the primary reflection region defined in Section C.2.2.5 of ISO 19206–3:2021(E) Annex C (incorporated by reference, see §596.5) when measured according to the radar measurement procedure specified in C.3 of ISO 19206–3:2021(E) Annex C (incorporated by reference, see §596.5) using the angle-penetration method.
Issued under the authority delegated in 49 CFR 1.87.
Robin Hutcheson,
Administrator.
Issued under authority delegated in 49 CFR part 1.95 and 49 CFR 501.8.
Raymond R. Posten,
Associate Administrator for Rulemaking.
[FR Doc. 2023–13622 Filed 7–5–23; 8:45 am]
BILLING CODE 4910–59–P
['Heavy Equipment and Vehicles']
['Heavy Equipment and Vehicles']
UPGRADE TO CONTINUE READING